JANETS_使用说明书.pdf - 第249页
JaNets 使用说明书 7 编辑程序 7- 40 吸取条件画面( RX -6 系列) 图 7- 56 吸取条件 (RX -6 系列 ) 画面 表 7- 20 吸取条件 ( RX -6 系列 ) 画面项目 项目 内容 吸取高度补偿 指定吸取元件时将吸嘴前端 压入多少。以 mm 为单位输入。 (默认值: 0.20mm , 使用夹持吸嘴时 : 0.00mm ,包装方式 为「托盘」时: 1.00mm ,外形尺 寸的短边小于 0.45mm 时:…
JaNets 使用说明书 7 编辑程序
7-39
吸取条件画面 (FX-3 系列)
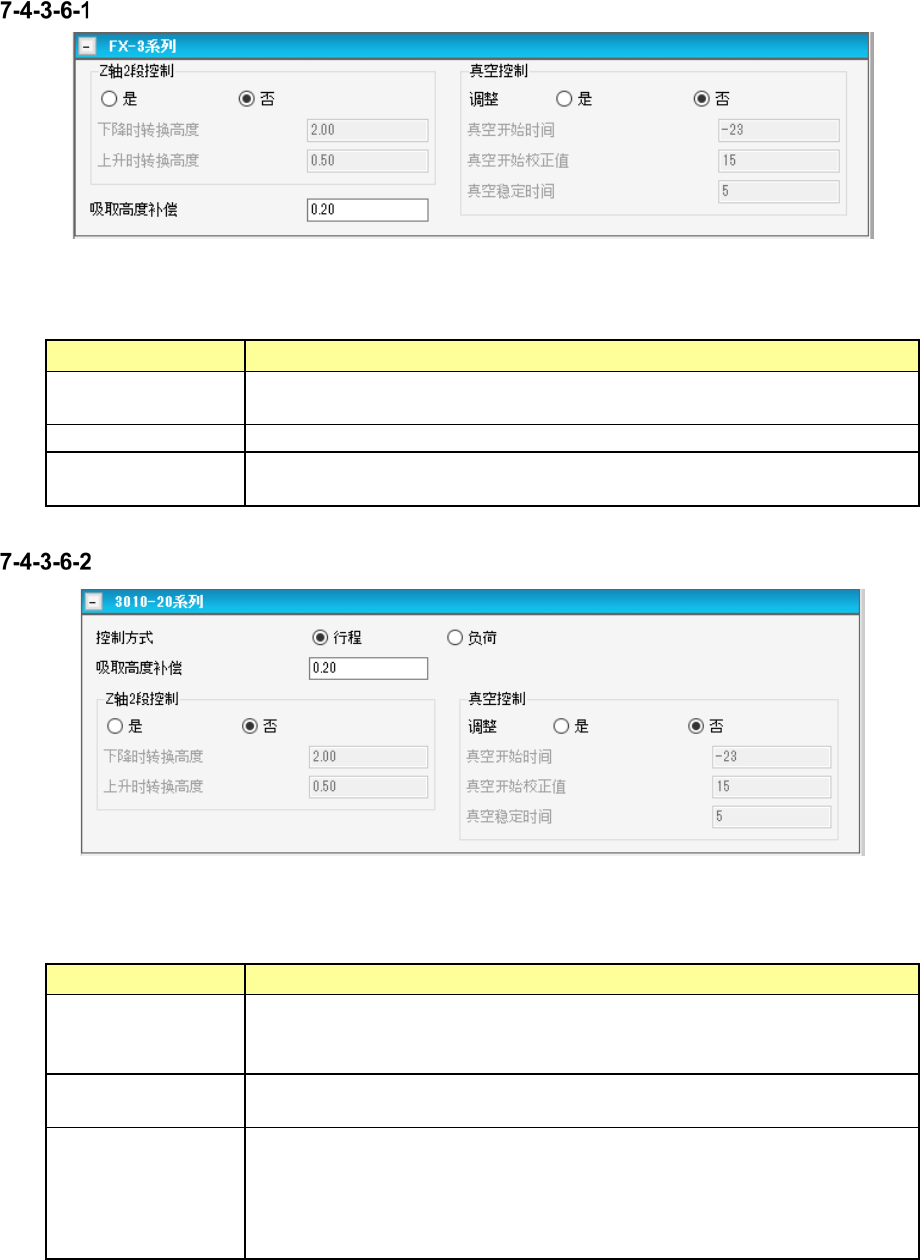
图 7-54 吸取条件(FX-3 系列)画面
表 7-18 吸取条件(FX-3 系列)画面项目
项目
说明
Z 轴 2 段控制 指定是否对吸取时的吸嘴上升、下降的速度进行 2 段控制。
进行 2 段控制时,要在上升及下降中分别输入进行 2 段控制的高度。
吸取高度补偿 指定吸取元件时,将吸嘴前端压入多少。以 mm 为单位输入。
真空控制 指定吸取时是否进行真空时间调整。
要调整时,以 ms 为单位输入调整时间。
吸取条件画面 (3010-20 系列)
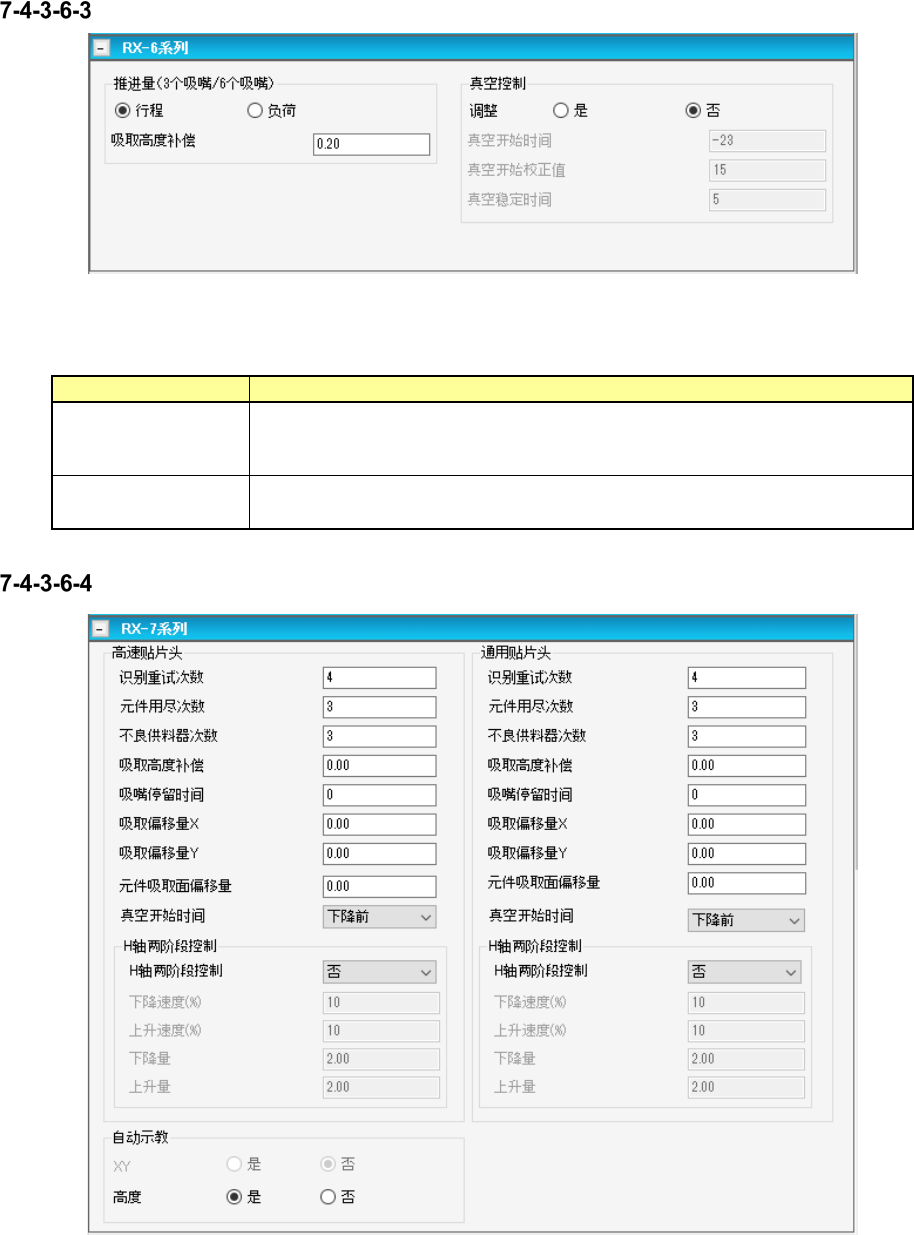
图 7-55 吸取条件(3010-20 系列)画面
表 7-19 吸取条件(3010-20 系列)画面项目
项目
说明
行程 以距离指定吸取元件时,将吸嘴前端压入多少。以 mm 为单位输入。
默认:0.20mm、使用夹持吸嘴时:0.000mm、负荷为「托盘」:1.000mm、外
形尺寸的短边为 0.45mm 以下时:0.000mm
负荷 以负荷指定吸取元件时,将吸嘴前端压入多少。以g为单位输入。
输入范围与默认值,根据吸嘴号及定心条件而不同。
真空控制 指定是否进行吸取时的真空时间调整。
调整时,要以 ms 为单位输入调整时间。
※KE-3020、KE-3020R,1005 尺寸以上的方形芯片的默认值会不同。
请在机器上通过重新将真空调整设定为「是」,对 JaNets 中制作的数
据设定正确的默认值。
JaNets 使用说明书 7 编辑程序
7-40
吸取条件画面(RX-6 系列)
图 7-56 吸取条件(RX-6 系列)画面
表 7-20 吸取条件(RX-6 系列)画面项目
项目
内容
吸取高度补偿 指定吸取元件时将吸嘴前端压入多少。以 mm 为单位输入。
(默认值:0.20mm,使用夹持吸嘴时:0.00mm,包装方式为「托盘」时:
1.00mm,外形尺寸的短边小于 0.45mm 时:0.00mm)。
真空控制 指定是否进行吸取时的真空时间调整。
调整时,要以 ms 为单位输入调整时间。
吸取条件画面 (RX-7 系列)
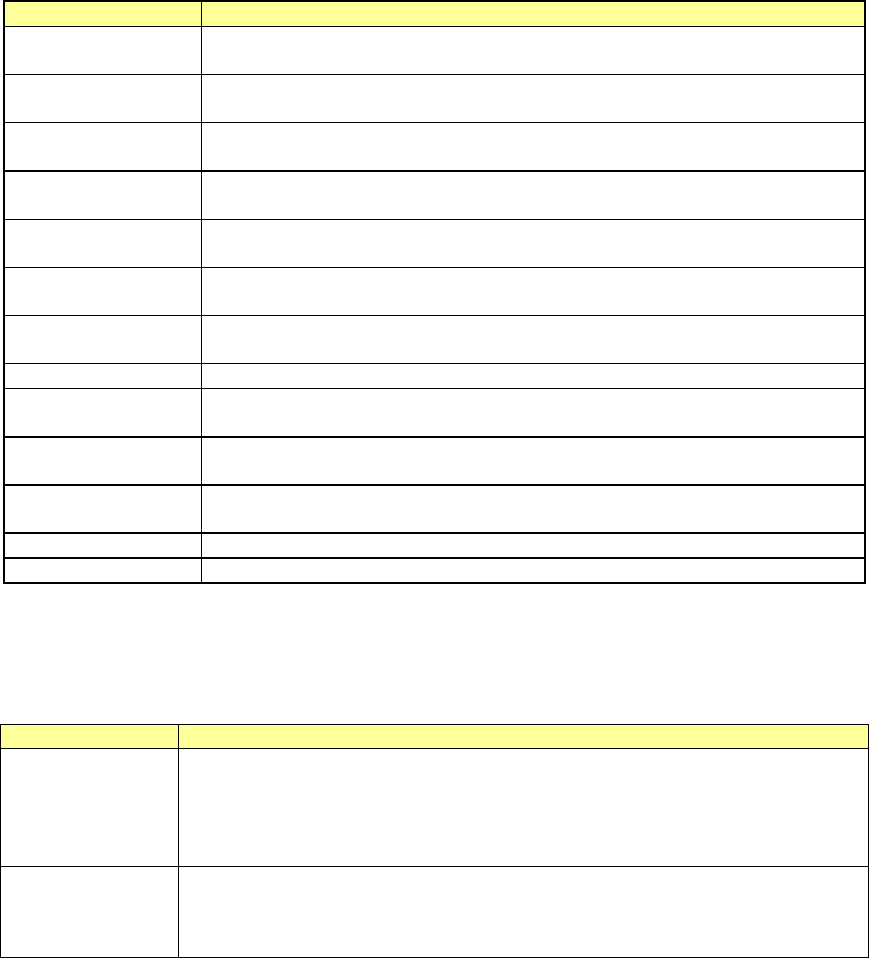
图 7-57 吸取条件(RX-7 系列)画面
JaNets 使用说明书 7 编辑程序
7-41
对高速贴片头、通用贴片头分别进行设定。
表 7-21 吸取条件(RX-7 系列)画面项目
项目
内容
识别位置重试次数 设定识别重试次数。
输入范围为 0~9。(默认值:4)
元件用尽次数 设定作为元件用尽的计数次数。
输入范围为 1~9。(默认值:3)
不良供料器次数 设定作为不良供料器的计数次数。
输入范围为 0~9。(默认值:3)
吸取高度补偿 设定供料器行走面高度的偏移量。
输入范围为 -1.00~10.50。(默认值:0.00)
吸嘴停留时间 为了确保吸取动作,设定吸嘴在吸取位置(下降位置)的停止时间。
输入范围为 0~9999。
吸取偏移量 X,Y 部设定从元件中心移动到吸取位置的 XY 方向的偏移量。
输入范围为 -999.99~999.99。(默认值:0.00)
吸取元件面偏移量 设定元件上面的高度到吸取元件面的高度。
输入范围为 -999.99~999.99。(默认值:0.00)
真空开始时间 选用的是喷嘴之前下降真空和喷嘴后下降真空。默认值是之前下降。
H 轴 2 段控制 指定吸取时吸嘴的上升、下降速度是否进行 2 段控制。
2 段控制时,输入上升和下降各自的 2 段控制高度、速度。
下降速度(%) 输入下降时速度的覆盖率。
请输入比在图像定心(RX-7 系列)的覆盖率处所设定的[H(吸取)]值更低的速度。
上升速度(%) 输入上升时速度的覆盖率。
请输入比在图像定心(RX-7 系列)的覆盖率处所设定的[H(吸取)]值更低的速度。
下降量 输入变更下降速度的高度。
上升量 输入变更上升速度的高度。
高速贴片头、通用贴片头共同的项目进行设定。
表 7-22 吸取条件(RX-7 系列 贴片头共通)画面项目
项目
内容
自动示教 X,Y 设定生产时的自动空洞教育的执行存在。
在长边不到 2.00mm,短边缘不到 1.20mm,形状种小费零部件,货物姿态带子,8mm 报
纸,供给角度 0°的条件准备齐全了的时候,变得可以选择。
以设定状态是「是」。
在不可选择的时候,变成「否」固定。
自动示教高度 设定是否在从馈线进行零部件吸收的时候执行出自 HMS 的零部件外表的高度的计测。
以设定状态是「是」。