00194931-20 Anleitung CAN Test Box-Error Frame Diagnoseeinheit_de.pdf - 第154页
1 - 154 SIPLACE CAN Bus Ausgabe 10/2018 154 4.18.3 Maschinen CAN Bus Struktur TX1 Bei den Siplace TX Maschin en werden 3 Maschinen-CAN Bus Netze für die Kommunikation zu den Subsystemen benutzt. Z ur Fehlersuche befinden…
1 - 153
Ausgabe 10/2018 Siplace CAN Bus
153
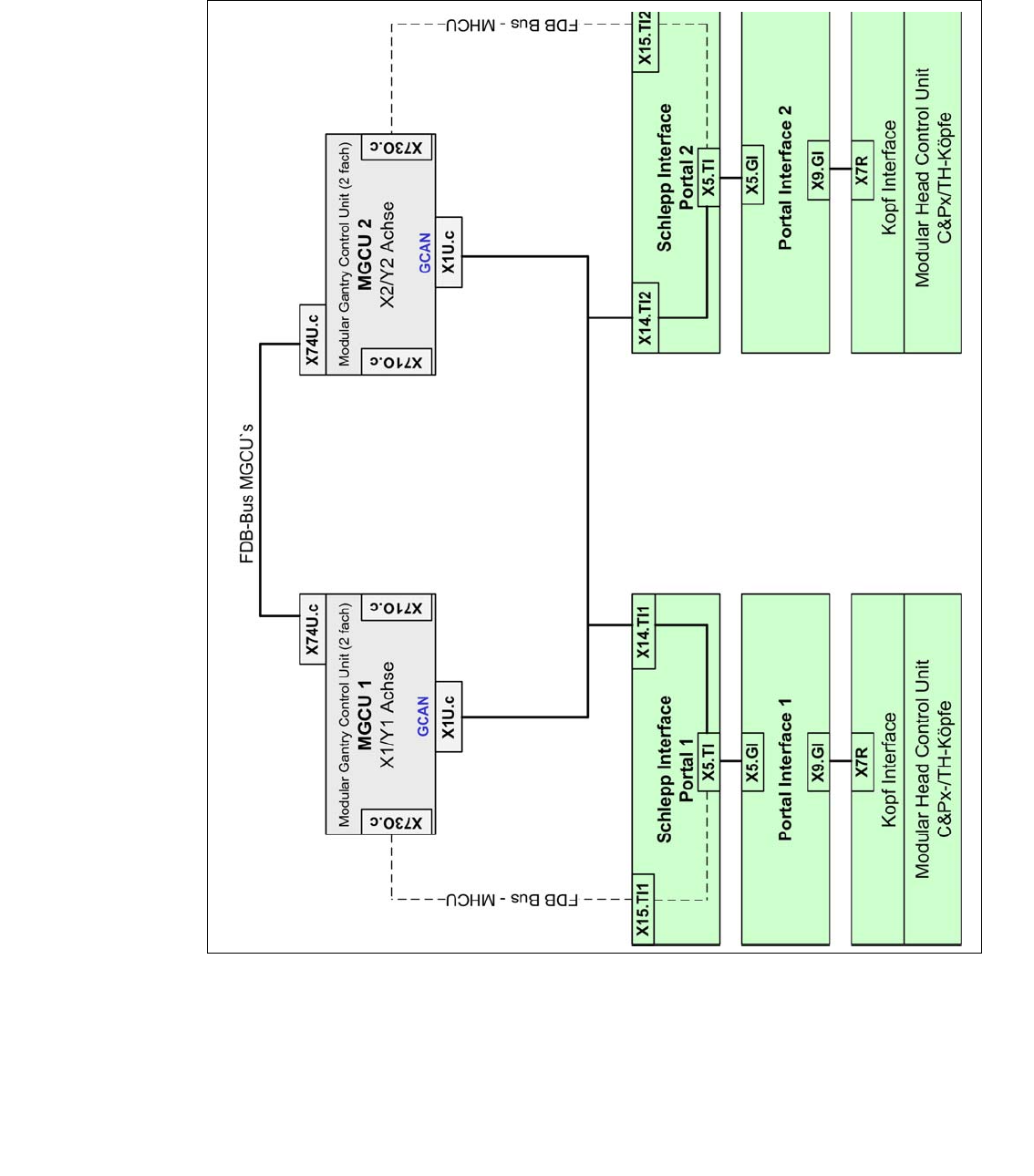
4.18.2 Gantry CAN Bus TX2i und TX2
Der GCAN-Bus ist für die Kommunikation zwischen den Modular Gantry Control Units (MGCU´s)
und Modular Head Control Units (MHCU´s) für Portale in einem Bestückbereich verantwortlich
(z.B. Kopf-CAN-Diagnose oder SIRIO-Kommunikation).
Abb. 4.18 - 3 Gantry CAN Bus Siplace TX2i und TX2
1 - 154
SIPLACE CAN Bus Ausgabe 10/2018
154
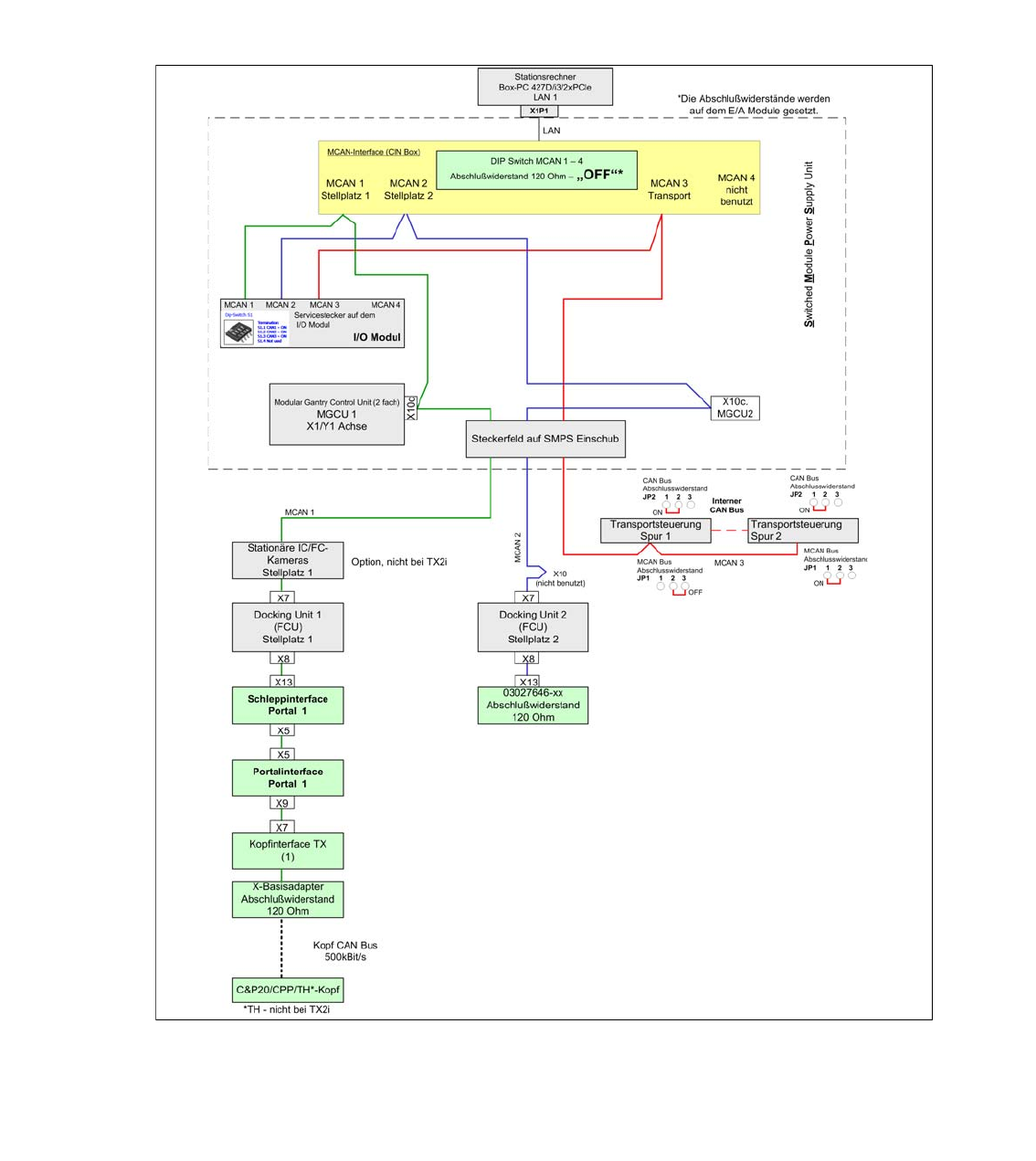
4.18.3 Maschinen CAN Bus Struktur TX1
Bei den Siplace TX Maschinen werden 3 Maschinen-CAN Bus Netze für die Kommunikation zu
den Subsystemen benutzt. Zur Fehlersuche befinden sich auf dem E/A Module für jedes CAN Bus
Netz ein Servicestecker.
Wie aus der folgenden Übersicht zu sehen, wird der MCAN 1 für die Subsysteme am
Stellplatz 1 benutzt (MGCU, FCU, stationäre Kamera, Portal 1). Der MCAN 2 versorgt den Stell-
platz 2 (FCU) und der MCAN 3 die Transportsteuerung.
Abb. 4.18 - 4 Maschinen CAN Bus Siplace TX1
1 - 155
Ausgabe 10/2018 Siplace CAN Bus
155
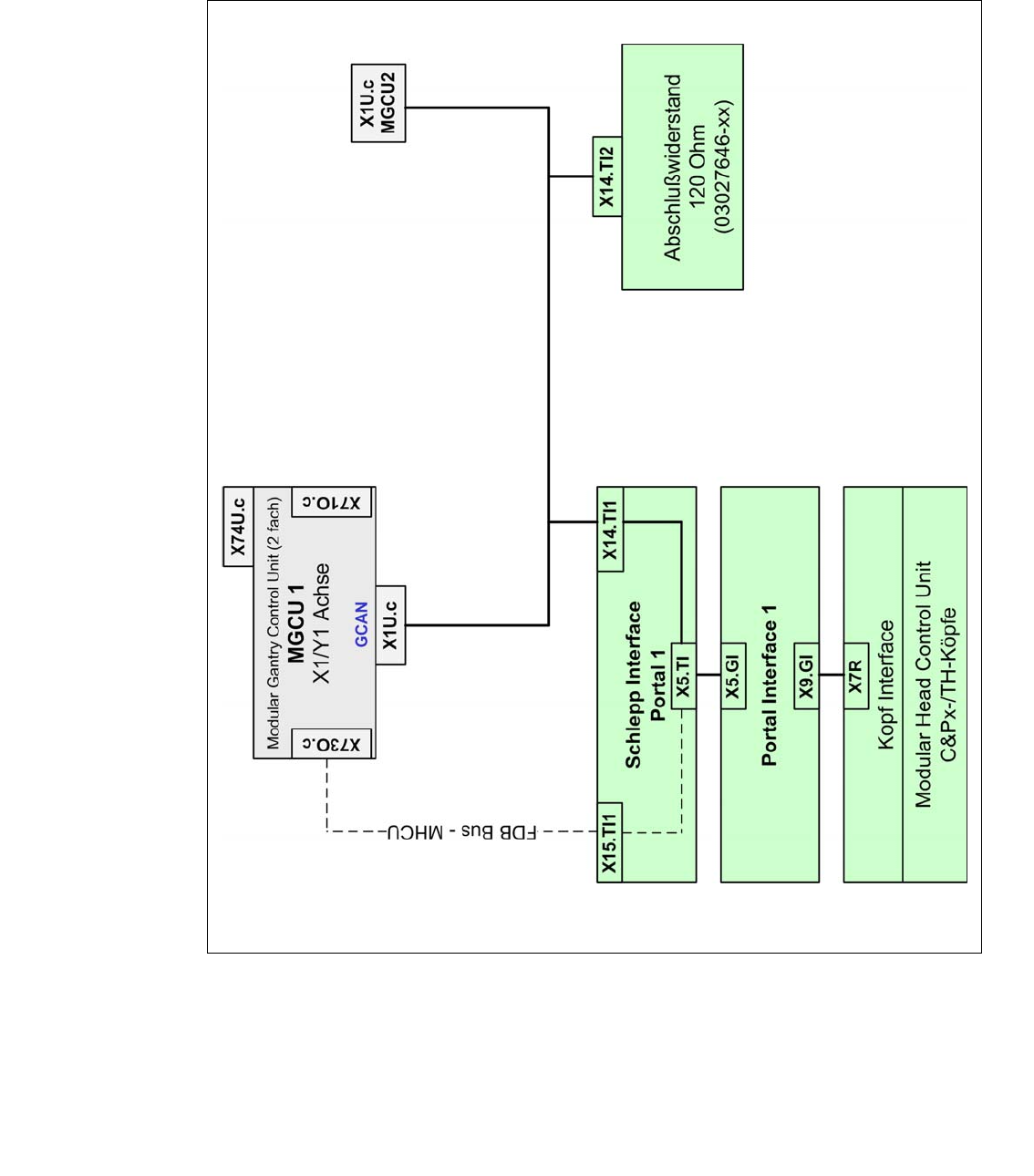
4.18.4 Gantry CAN Bus TX1
Der GCAN-Bus ist für die Kommunikation zwischen den Modular Gantry Control Units (MGCU´s)
und Modular Head Control Units (MHCU´s) für Portale in einem Bestückbereich verantwortlich
(z.B. Kopf-CAN-Diagnose oder SIRIO-Kommunikation).
Abb. 4.18 - 5 Gantry CAN Bus Siplace TX1