KD-2077_MCP_Rev1.0_C.pdf - 第9页
R e v . 1 . 0 机械控制参数 2-4 2-2-2 XY 选择了 [XY] 之后,就会如图 2-2-2 所示显示出级联菜单。 图 2-2-2 XY 菜单 (1)X、Y 进行 X 轴、 Y 轴的设定。 ( a ) 进行 X 轴的 PTP 动作的轴控制参数和移动结束触发器的设定。 ( b ) 进行 X 轴的 PTP 动作增益的设定。 (c) 进行 X 轴的 PTP 以外的动作的轴控制参数和结束触发器的设定。 ( d ) 进行 X …
Rev.1.0
机械控制参数
2-3
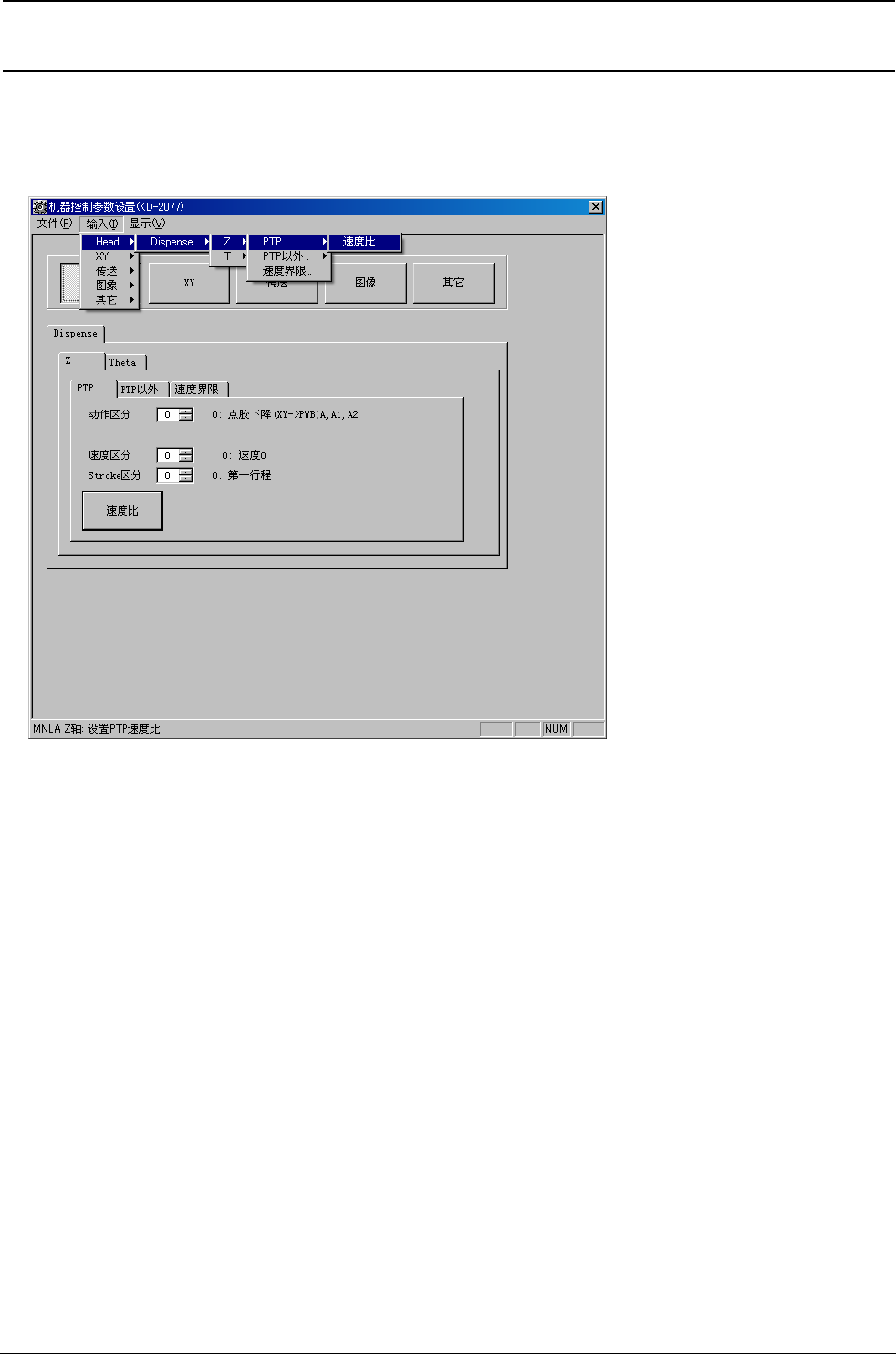
2-2-1 点胶头
选择了[Head]之后,就会如图 2-2-1 所示显示出级联菜单。
图 2-2-1 点胶头菜单
(1)Dispense
进行点胶头(Dispense Head)的 Z 轴,θ轴的设定。
(a) 进行Z轴的 PTP 动作的速度比的设定。
(c) 进行Z轴的 PTP 以外的动作速度比的设定。
(e) 进行Z轴的速度限制呼出、分辨率的设定。
(g) 进行θ轴的 PTP 动作速度比的设定。
(i) 进行θ轴的 PTP 以外的动作速度比的设定。
(k) 进行θ轴的速度限制呼出和分辨率的设定。
Rev.1.0
机械控制参数
2-4
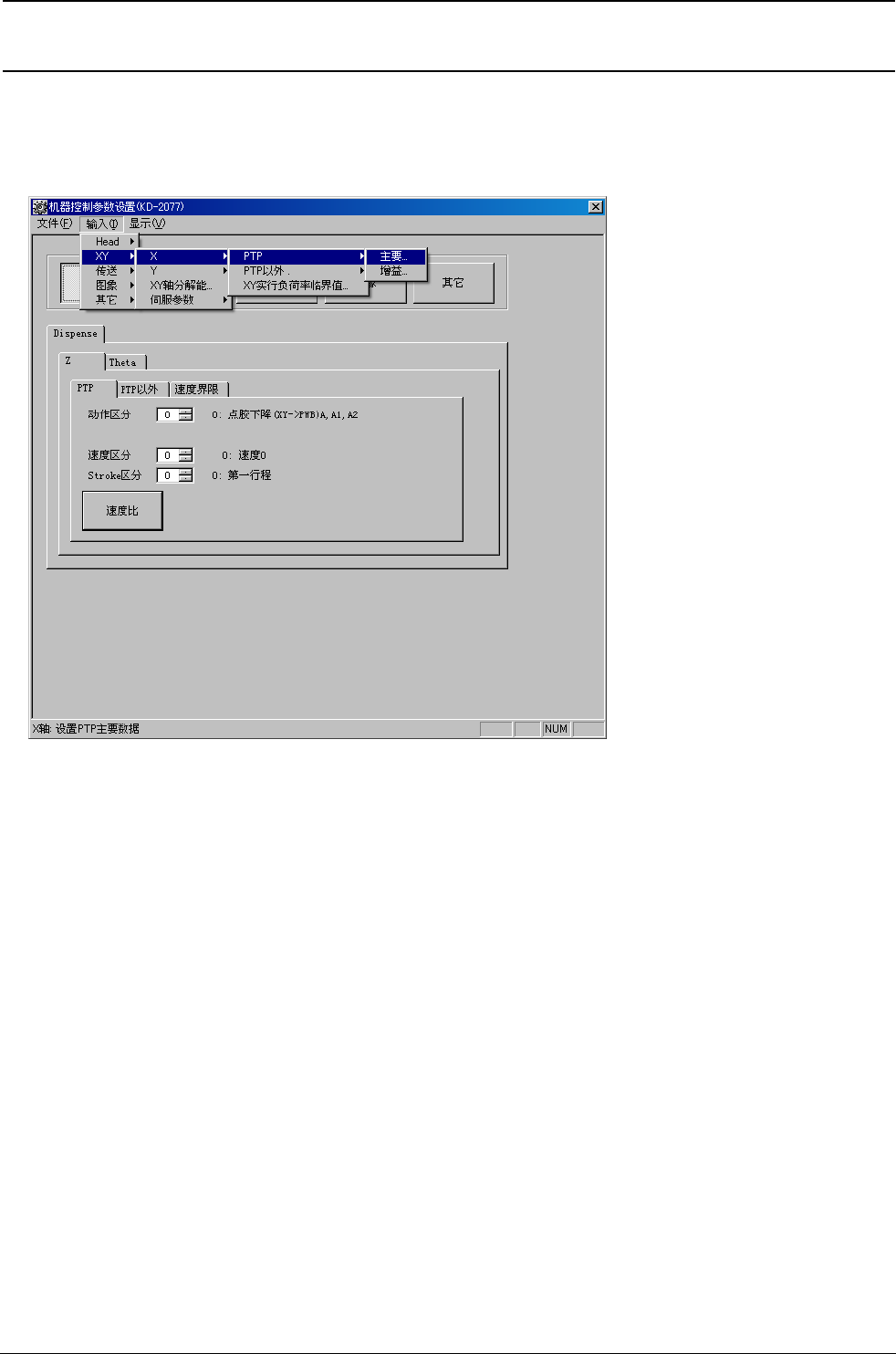
2-2-2 XY
选择了[XY]之后,就会如图 2-2-2 所示显示出级联菜单。
图 2-2-2 XY 菜单
(1)X、Y
进行X轴、Y轴的设定。
(a) 进行X轴的 PTP 动作的轴控制参数和移动结束触发器的设定。
(b) 进行X轴的 PTP 动作增益的设定。
(c) 进行X轴的 PTP 以外的动作的轴控制参数和结束触发器的设定。
(d) 进行X轴的 PTP 以外的动作增益的设定。
(e) 在 X 轴的电流监视项中设置转矩限制。
(2)XY 轴分辨率
进行1脉冲的X轴、Y轴的分别率的设定。
(3)伺服参数
进行伺服参数、控制参数、定位板系统参数的设置。
Rev.1.0
机械控制参数
2-5
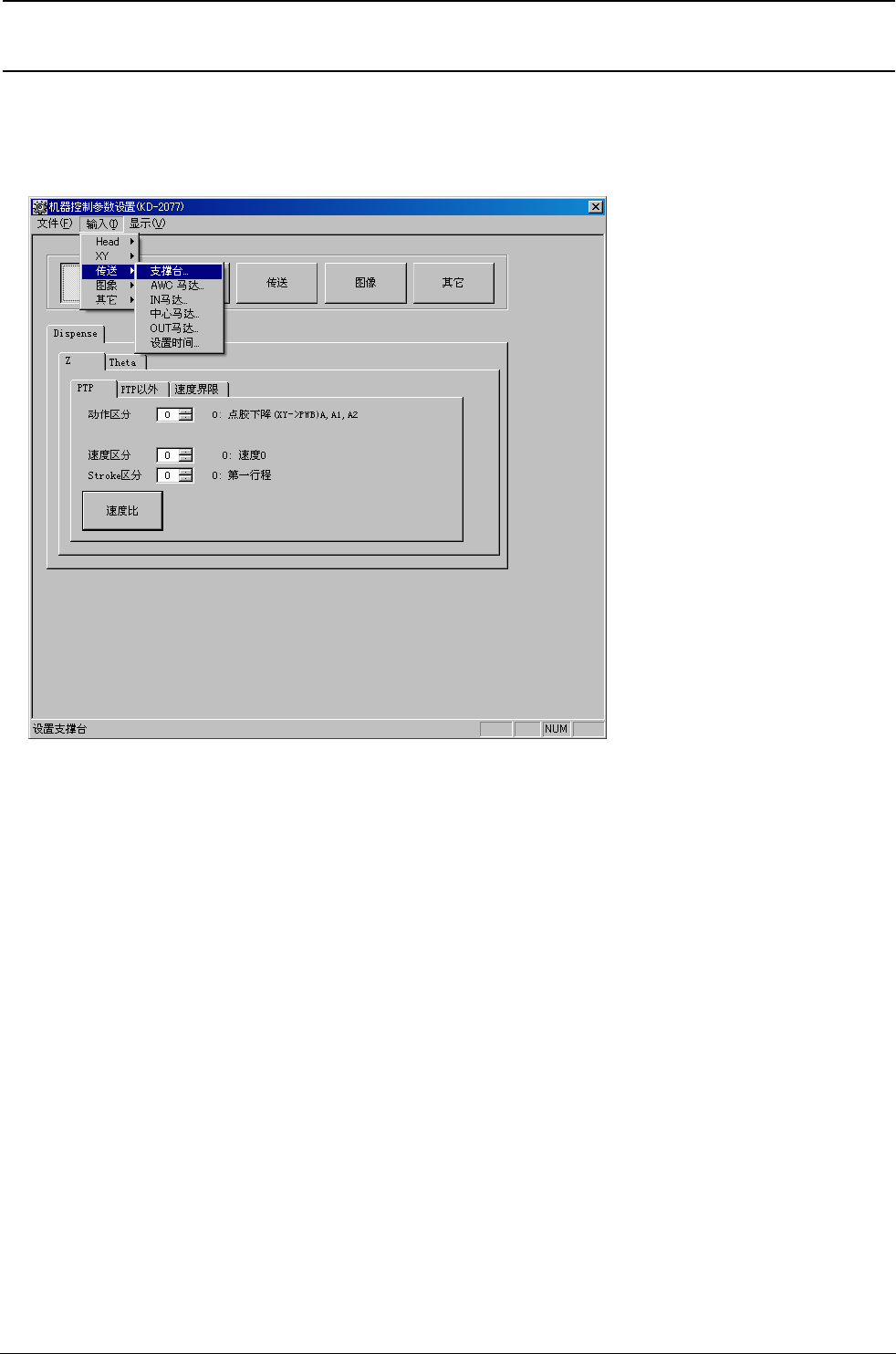
2-2-3 传送
选择了[传送]之后,就会显示出如图 2-2-3 所示的级联菜单。
图 2-2-3 传送菜单
(1)支撑台
进行支撑台数据的设定。
(2)AWC 马达
进行 AWC 马达数据的设定。
(3)IN 马达
进行 IN 马达数据的设定。
(4)中心马达
进行中心马达数据的设定。
(5)OUT 马达
进行 OUT 马达数据的设定。
(6)设置时间
进行传送的检测时间或驱动时间的设定。