FX-3R_QA表.pdf - 第14页
QA表 NO. 2/ 2 机种 X车架左右的高度差:10 ㎛ 以下 (1) 把贴装头板从右端偏开,用高度尺测量X车架的导向器下面的高度。 测量位置是从导向导轨的右端开始的第二个定位孔处的导轨下面。 (2) 在X车架的左端,从X车架的内侧插入长35mm的M4带帽螺钉,轻轻地靠着Y线性底座。 (3) X车架左端高度和右端用同样方法进行测量,用M4螺钉进行高度调整,使左右的差在10 ㎛ 以下。 测量位置是从导向导轨的左端开始的第4个定位孔处的…
QA表 NO. 1/2
机种
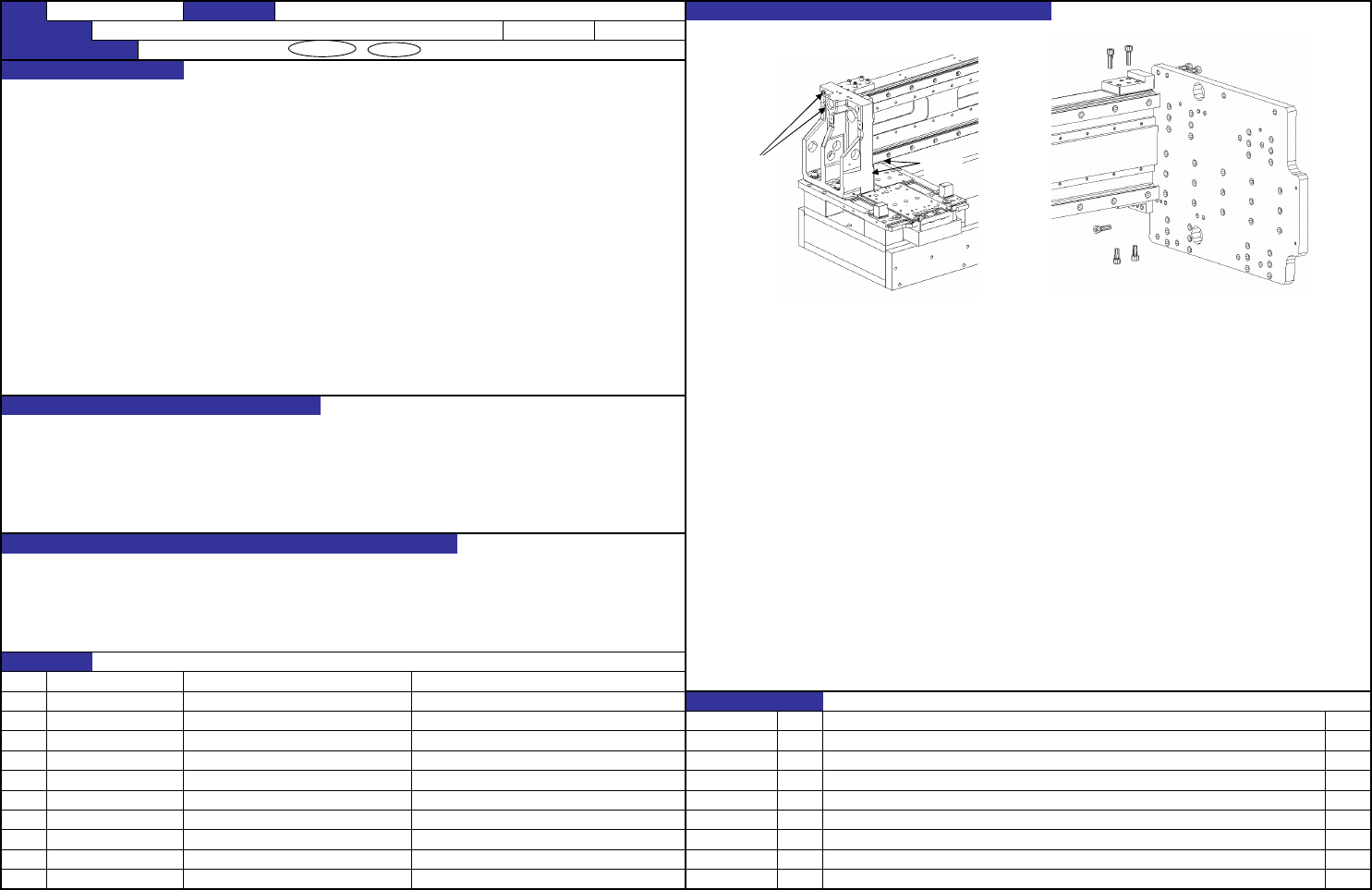
相对于底部车架基准面贴装头板的直角度:0.03㎜以下
把贴装头板放在左右两边,测得值的相对差:0.01㎜以下
1. 确认方法
以定盘为基准,使用校对角尺测量贴装头板的直角度,确认该角度是否在0.03以下(左右相对差0.01以下)。
此时,贴装头板的位置,在X轴车架的左右两端的两处进行测量。
另外,校对角尺接触到的位置,差不多在贴装头板的中央。
2. 调整方法
对于线路板传送面和贴装头之间直角的取得很重要
让贴装头板靠近右侧(距离机械止动器10mm左右)。
在校对角尺上安装千分表,确定角尺、千分表的位置,保证在此位置能够测量贴装头板X方向中央附近的垂直度。
拧松X车架两端的座上的螺钉上下各2根,使上下(大致标准是导向块高度)位置上的差在20㎛以下,然后拧紧螺钉。
1. 贴装精度的恶化
2. 吸附不良
NO
①
② NO. 担当人
③
④
⑤
⑥
⑦
⑧
⑨
⑩
【1】-5
功能名称 贴装头板的直角·高度调整(1/2)
FX-3R 装置名称 XY装置(3) 确认方法及调整方法(故障处理方法)
功能・安全性 / 可靠性 / 安全性 / 商品特点
质量特性(规格调整值)
功能作用(规格调整值的意义)
预想故障(应规格调整值不良而发生的故障)
质量保证类别
对象元件
货号 品名 有关质量特性
40104626 X_FARME_S
变更履历
内容
40104629/40104630
Y_LINEAR_BASE_CA / Y_LINEAR_BASE_CB
40104579/40104580 XM_BASE_A / XM_BASE_B
日期
40104631 Y_LINEAR_BASE_S
4根
4根
2根
2根
2根 2根
QA表 NO. 2/2
机种
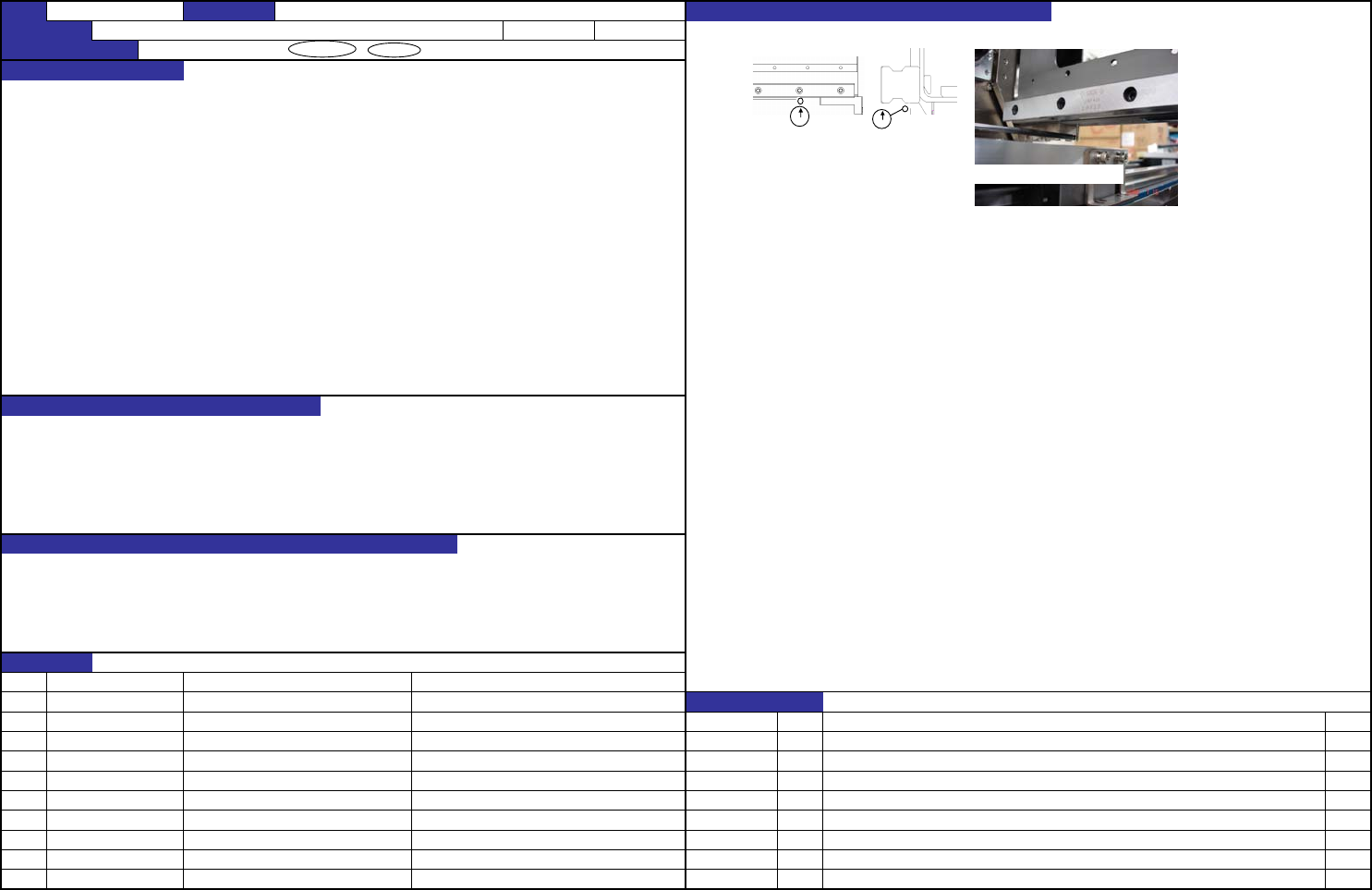
X车架左右的高度差:10㎛以下
(1) 把贴装头板从右端偏开,用高度尺测量X车架的导向器下面的高度。
测量位置是从导向导轨的右端开始的第二个定位孔处的导轨下面。
(2) 在X车架的左端,从X车架的内侧插入长35mm的M4带帽螺钉,轻轻地靠着Y线性底座。
(3) X车架左端高度和右端用同样方法进行测量,用M4螺钉进行高度调整,使左右的差在10㎛以下。
测量位置是从导向导轨的左端开始的第4个定位孔处的导轨下面。
(4) 把X车架调整成扭曲方向。使用扭曲方向调整夹具。把校正角尺放在左端,
将其与在右端的测量值的差调整为10㎛以下,拧紧X车架两端座的定位螺钉上下各2根。
(5) 对左右的高度进行测量(1)(3),确认左右差是否在10㎛
以下。
当值为规定值以外时,返回(3)进行调整。调整后,拆下高度调整用M4螺钉。
对于线路板传送面和贴装头之间直角的取得很重要
1. 贴装精度的恶化
2. 吸附不良
NO
①
② NO. 担当人
③
④
⑤
⑥
⑦
⑧
⑨
⑩
【1】-6
40104631 Y_LINEAR_BASE_S
40104629/40104630
Y_LINEAR_BASE_CA / Y_LINEAR_BASE_CB
功能作用(规格调整值的意义)
预想故障(应规格调整值不良而发生的故障)
40104579/40104580 XM_BASE_A / XM_BASE_B
日期 内容
品名 有关质量特性
质量特性(规格调整值)
40104626 X_FARME_S
变更履历
对象元件
货号
质量保证类别 功能・安全性 / 可靠性 / 安全性 / 商品特点
功能名称 贴装头板的直角·高度调整(2/2)
FX-3R 装置名称 XY装置(3) 确认方法及调整方法(故障处理方法)
导向器
右端正面 侧面
调整后,别忘了取下来
QA表 NO. 1/2
机种
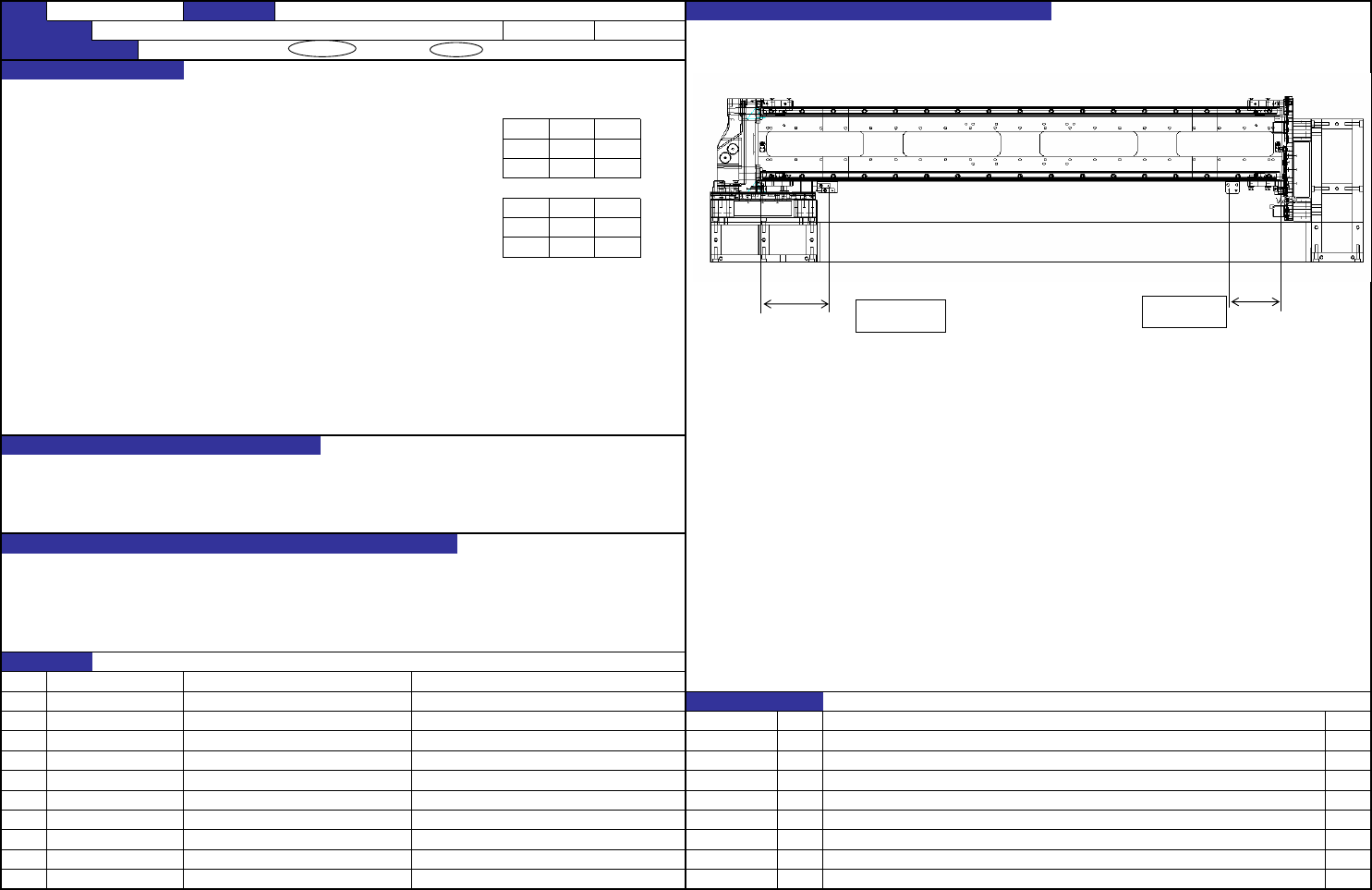
1. X限制传感器位置
1. X轴限制传感器位置
1-1. 左侧(X阴极限制传感器) X直线导向器端面到传感器中心的距离(临时固定位置)
LF/RR LR/RF
L 130 94
XL 127.5 91.5
1-2. 右侧(X阳极限制传感器) X直线导向器端面到传感器中心的距离
LF/RR LR/RF
L 97.5 133.5
XL 95 131
2. Y轴限制传感器位置 导向导轨端面到传感器中心的距离 :96.7mm
Y极限
传感器应在离开主机控制软件移动范围2mm以上的位置上启动。
3. 限制传感器和配件之间的间隙 :0.8~1.5mm(目标1.0mm) LF、RR情况时的图
4. X轴干渉传感器位置
限动器之间的距离:5mm ① 拧松固定限制传感器支架的螺钉,使从X直线导向器端面到其距离为上图所示尺寸然后进行固定。
X轴干渉
传感器应在离开主机控制软件移动范围2mm以上的位置上启动。 ② 在前后方向上进行固定,使安装在贴装头背面的传感器配件和传感器表面的间隙为0.8~1.5mm(目标1.0mm)。
③ 通过主机软件控制到达软件限位之后,关断伺服,确认手动移位2mm以上时X极限传感器启动。
1. 因软件故障、事故等超出通常移动范围进行移动时要进行伺服断开,回避危险。
2. 乱跑时在碰到机械止动器之前断开伺服,控制机器的损坏。
1. 紧急时刻(乱跑等)因未启动伺服断开而引起的危险。
2. 紧急时刻(乱跑等)因未启动伺服断开而引起的机器破损。
NO
①
② NO. 担当人
③
④
⑤
⑥
⑦
⑧
⑨
⑩
【1】-7
FX-3R 装置名称 XY装置(4) 确认方法及调整方法(故障处理方法)
功能名称 限制传感器位置(1/2)
质量保证类别 功能・安全性 / 可靠性 / 安全性 / 商品特点
质量特性(规格调整值)
功能作用(规格调整值的意义)
调整X极限传感器的位置,使传感器在接触到止动器橡胶的点至身前6mm之间启
动,然后予以固定。
X极限传感器应在离开主机控制软件移动范围2mm以上的位置上启动。
调整X极限传感器的位置,使传感器在接触到止动器橡胶的点至身前6mm之间启
动,然后予以固定。
X极限传感器应在离开主机控制软件移动范围2mm以上的位置上启动。
预想故障(应规格调整值不良而发生的故障)
对象元件
货号 品名 有关质量特性
变更履历
内容日期
L规格 130mm
XL规格 127.5mm
L规格 97.5mm
XL规格 95mm