赫立AOI中文客户培训教材(2).pdf - 第36页
电 阻缺件的差异你找了 吗 ? 需要你 对 算法的充分理解 找到一种光源如上 图 所示,当出 现 距离 的差异 时 ,使用算法亮度梯度双 边 距离( mm ), 设 置范 围 ,当元件缺件的 时 候,距离会 变 短, 设 置下限如下 图 如果缺件,两条 绿线 的距离是 0.20 0 less than 0.35 , 报 警:缺件 算法:亮度梯度双 边 距离( mm ) 在“亮度梯度双 边 定位” 获 取的两条 边 界的基 础 上, 计 …
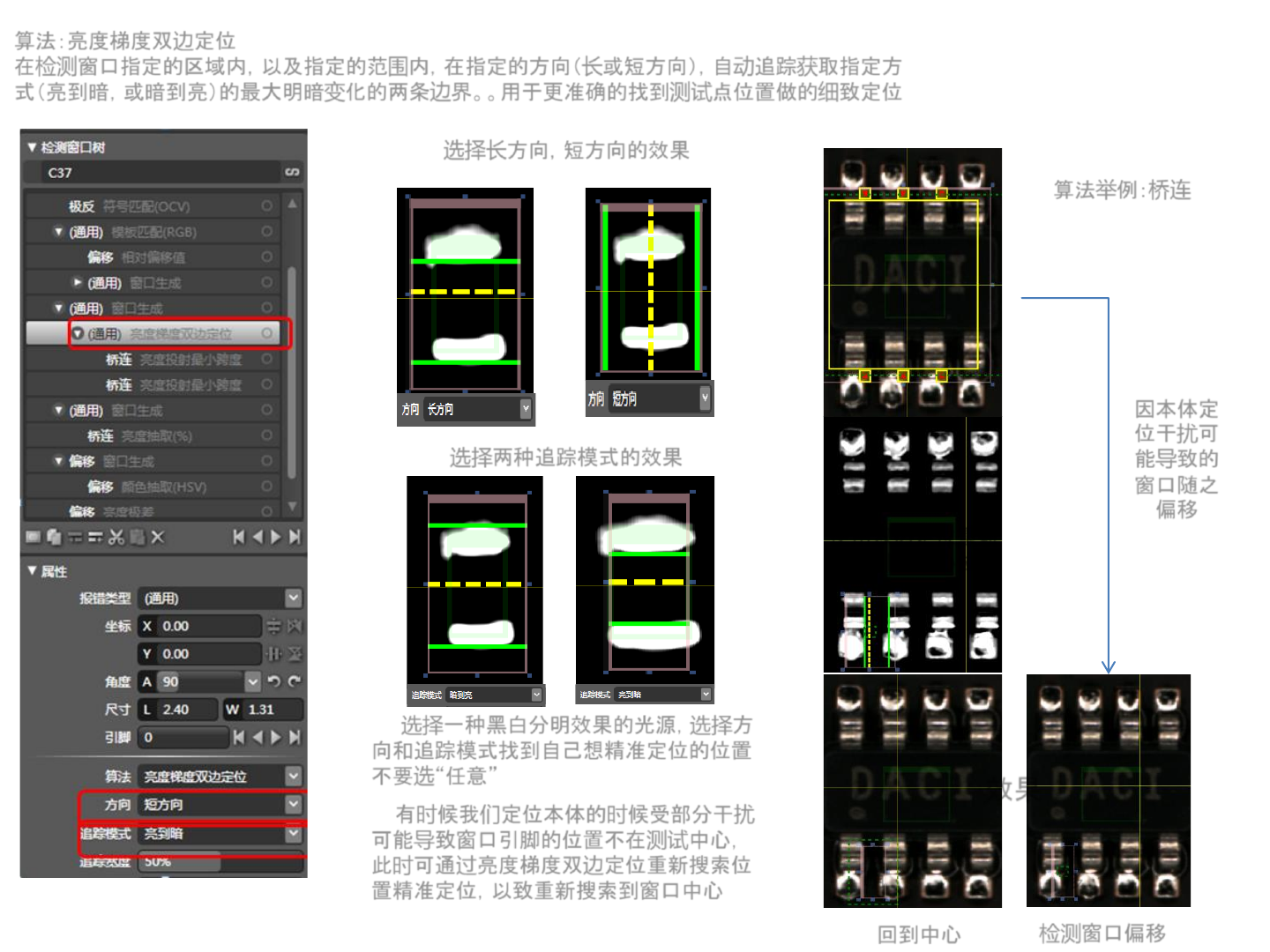
有时候我们定位本体的时候受部分干扰
可能导致窗口引脚的位置不在测试中心,
此时可通过亮度梯度双边定位重新搜索位
置精准定位,以致重新搜索到窗口中心
检测窗口偏移
回到中心
因本体定
位干扰可
能导致的
窗口随之
偏移
效果
算法:亮度梯度双边定位
在检测窗口指定的区域内,以及指定的范围内,在指定的方向(长或短方向),自动追踪获取指定方
式(亮到暗,或暗到亮)的最大明暗变化的两条边界。。用于更准确的找到测试点位置做的细致定位
选择长方向,短方向的效果
选择两种追踪模式的效果
使用双边定位重新
搜索引脚中心位置
准
确
偏
移
算法举例:桥连
选择一种黑白分明效果的光源,选择方
向和追踪模式找到自己想精准定位的位置
不要选“任意”
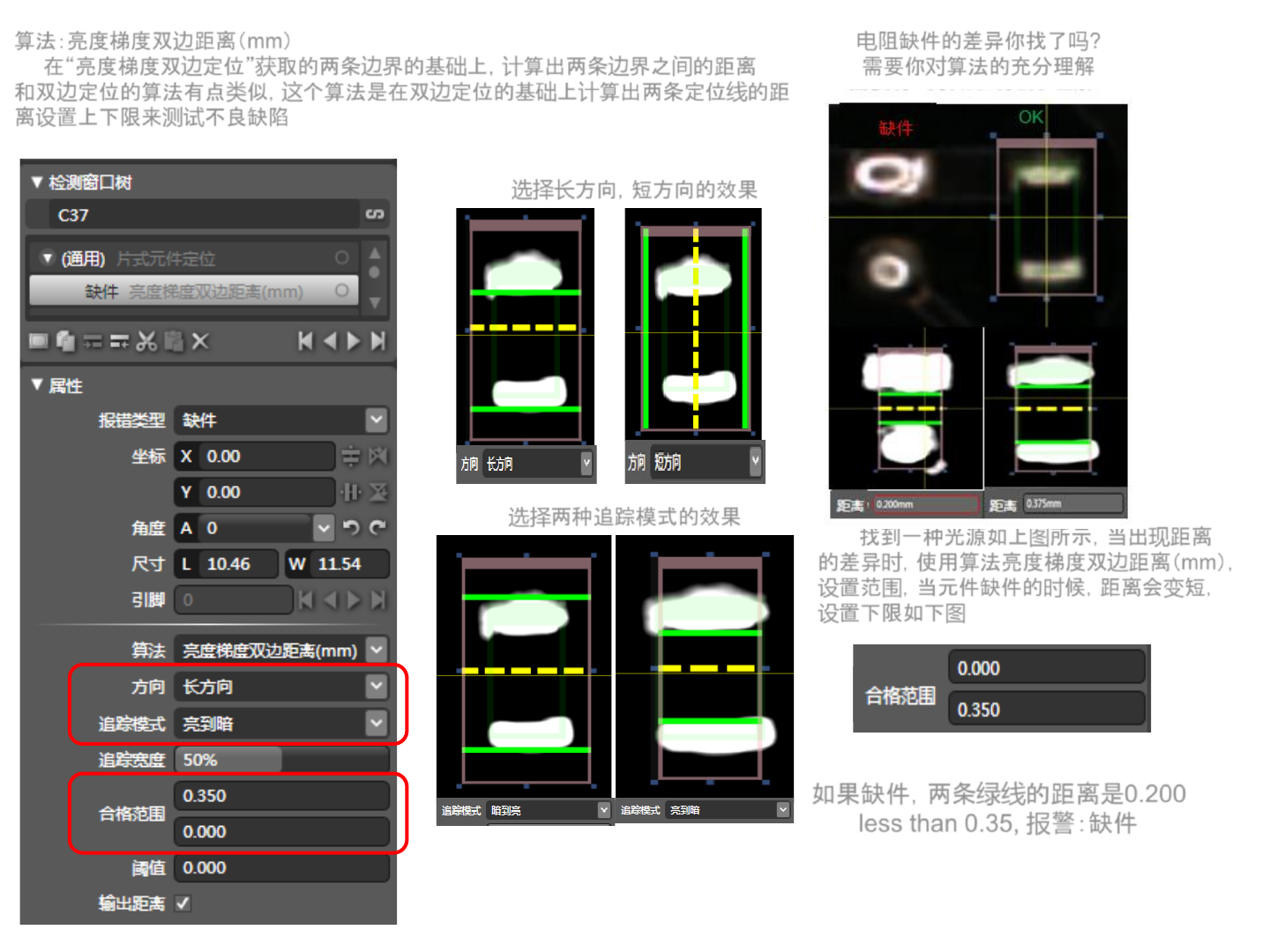
电阻缺件的差异你找了吗?
需要你对算法的充分理解
找到一种光源如上图所示,当出现距离
的差异时,使用算法亮度梯度双边距离(mm),
设置范围,当元件缺件的时候,距离会变短,
设置下限如下图
如果缺件,两条绿线的距离是0.200
less than 0.35, 报警:缺件
算法:亮度梯度双边距离(mm)
在“亮度梯度双边定位”获取的两条边界的基础上,计算出两条边界之间的距离
和双边定位的算法有点类似,这个算法是在双边定位的基础上计算出两条定位线的距
离设置上下限来测试不良缺陷
选择长方向,短方向的效果
选择两种追踪模式的效果
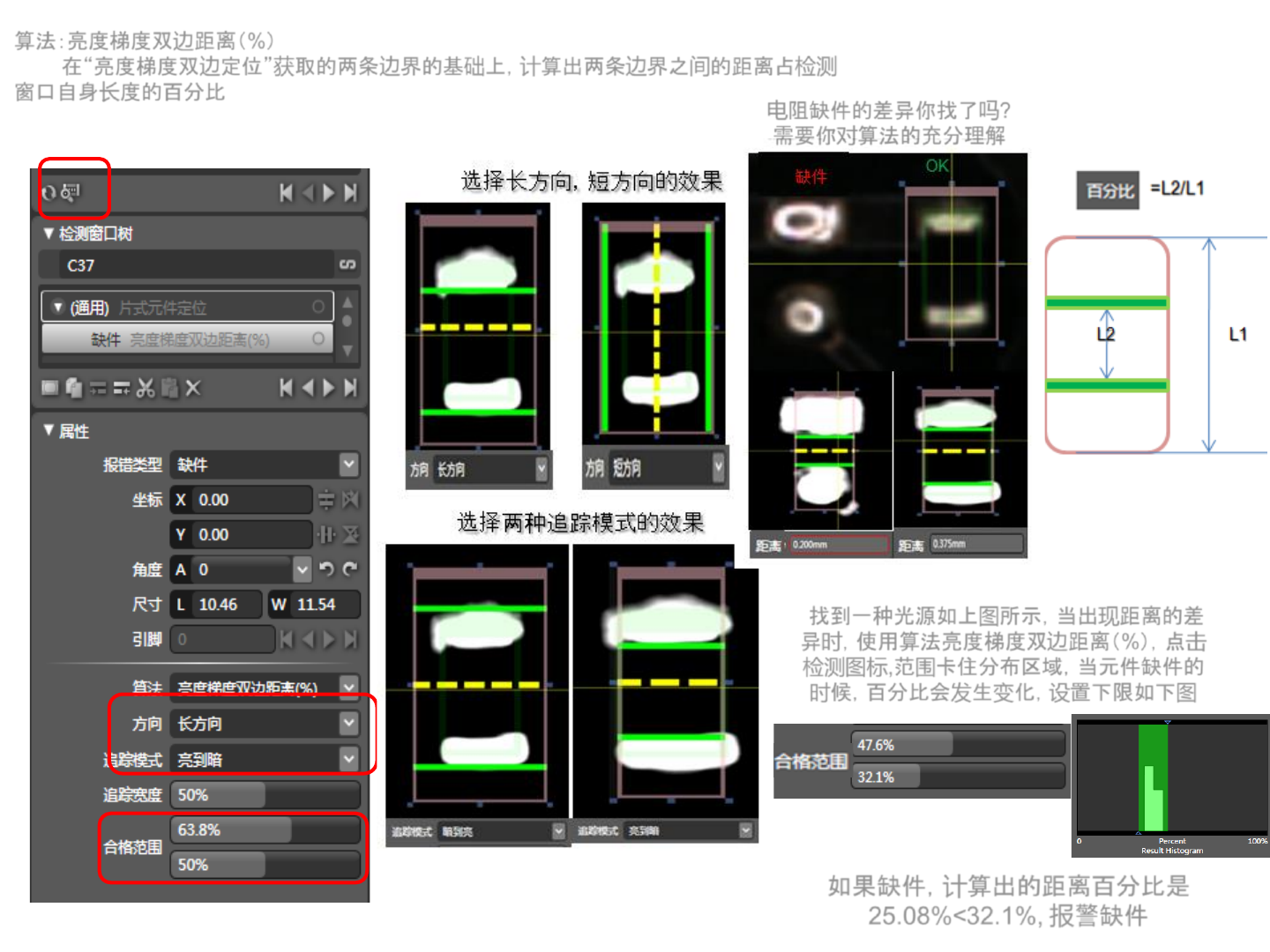
找到一种光源如上图所示,当出现距离的差
异时,使用算法亮度梯度双边距离(%),点击
检测图标,范围卡住分布区域,当元件缺件的
时候,百分比会发生变化,设置下限如下图
如果缺件,计算出的距离百分比是
25.08%<32.1%, 报警缺件
算法:亮度梯度双边距离(%)
在“亮度梯度双边定位”获取的两条边界的基础上,计算出两条边界之间的距离占检测
窗口自身长度的百分比
电阻缺件的差异你找了吗?
需要你对算法的充分理解