00193531-02.pdf - 第95页
Betriebsanleitung SIPLACE S-27 HM 3 Technische Daten Softwareversion SR.503.xx Ausgabe 07/ 2003 DE 3.8 Bestückk öpfe 95 3.8.2.1 Beschreib ung Die Funk tionalität d es 6-Se gment-Colle ct&Place- Kopfes ist mi t der de…
3 Technische Daten Betriebsanleitung SIPLACE S-27 HM
3.8 Bestückköpfe Softwareversion SR.503.xxAusgabe 07/2003 DE
94
3
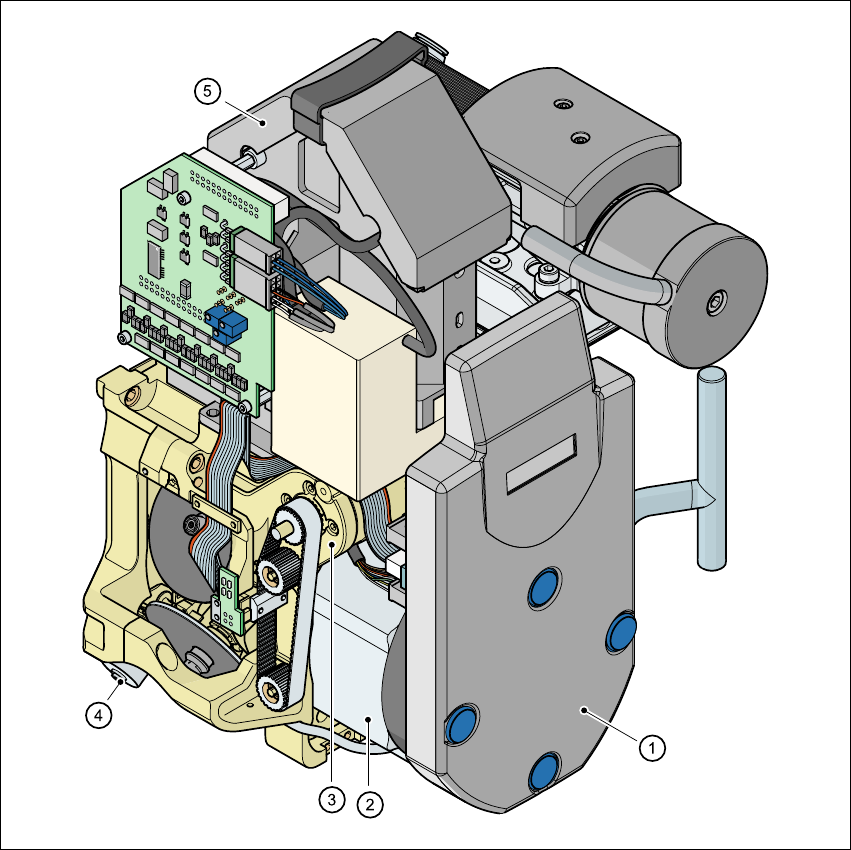
Abb. 3.8 - 4 6-Segment-Collect&Place-Kopf - Funktionsgruppen Teil 2
3
(1) Zwischenverteilerplatine, unter der Abdeckung
(2) Sternantrieb - DR-Motor
(3) Z-Achsenmotor
(4) Ventilstellantrieb
(5) BE-Kamera 39 x 39
Betriebsanleitung SIPLACE S-27 HM 3 Technische Daten
Softwareversion SR.503.xx Ausgabe 07/2003 DE 3.8 Bestückköpfe
95
3.8.2.1 Beschreibung
Die Funktionalität des 6-Segment-Collect&Place-Kopfes ist mit der des 12-Segment-
Collect&Place-Kopfes vergleichbar. Mit seinem Standard-BE-Visionmodul kann der 6-Segment-
Collect&Place-Kopf IC bis zu einer Kantenlänge von 32mm x 32mm genau und schnell bestü-
cken. Sein Einsatz ist optimal, wenn der Anteil von IC am Bestückprozess sehr hoch ist. Die
Zykluszeit des 6-Segment-Collect&Place-Kopfes ist abhängig von der Dimension und der Anzahl
der BE-Beinchen bzw. Bumps.
3.8.2.2 Technische Daten
3
Bauelementespektrum 0603 bis 32mm x 32mm
PLCC,SO, QFP, TSDP, SOT, MELF,
CHIP, IC, BGA
BE-Spezifikationen
Max. Höhe
Min. Beinchenraster
Min. Bump-Raster
Min. Ball-/Bump-Durchmesser
Min. Abmessungen
Max. Abmessungen
Max. Gewicht
8,5 mm (10,7 mm auf Anfrage)
0,5 mm
0,56 mm
0,32 mm
1,6 mm x 0,8 mm
32 mm x 32 mm
5 g
Programmierbare Aufsetzkraft 2,4 bis 5,0 N
Pipettentypen 8xx, 9xx
Max. Bestückleistung 8.750 BE/h
Winkelgenauigkeit ± 0,3° / 4 σ (Portal 1)
± 0,4° / 4 σ (Portal 2)
Bestückgenauigkeit ± 70 µm / 4 σ (Portal 1)
± 80 µm / 4 σ (Portal 2)
3 Technische Daten Betriebsanleitung SIPLACE S-27 HM
3.9 Visionmodule Softwareversion SR.503.xxAusgabe 07/2003 DE
96
3.9 Visionmodule
3.9.1 Beschreibung
Jeder Automat besitzt
– zwei BE-Kameras an den Bestückköpfen und
– zwei LP-Kameras an den Portalunterseiten der X-Achsen.
Die Visionauswerteeinheit ist im Steuereinschub des Automaten untergebracht. Mit Hilfe des BE-
Visionmoduls wird
– die genaue Position des Bauelements an der Pipette und
– die Geometrie der Gehäuseform bestimmt.
Das LP-Visionmodul ermittelt mit Hilfe von Passmarken auf den LPs
– die Lage der Leiterplatte,
– ihren Verdrehwinkel
– und den Verzug der Leiterplatte.
Darüber hinaus ermittelt das LP-Visionmodul mit Hilfe von Passmarken auf den Zuführmodulen
die exakte Abholposition von Bauelementen. Dies ist insbesondere für kleine Bauelemente wich-
tig.