CN_Nordson_EFD_EV_Series_Operating_Manual.pdf - 第114页
EV系列自动点胶系统 www.nordsonefd.com/cn china@nordsonefd.com +86 (21) 3866 9006 诺信 EFD 在全球范围内销售专业点胶系统并提供技术支持服务 114 附录G - I/O引脚功能设置 附录G - I/O引脚功能设置 I/O引脚功能可通过系统设置画面上的“专家”菜单进入,该功能提供了一 套可以被分配至可用的输入和输出的I/O端口的用户可配置的条件。这些条 件影响机器人操作。 …
EV系列自动点胶系统
www.nordsonefd.com/cn china@nordsonefd.com +86 (21) 3866 9006 诺信EFD在全球范围内销售专业点胶系统并提供技术支持服务
113
附录F - 高度传感器的设置和使用(续)附录F - 高度传感器的设置和使用(续)
使用高度传感器功能使用高度传感器功能
前提条件前提条件
系统已正确设置。请参见第42页”设置和校准系统(必需)”。
已安装、启用并设置高度传感器。请参见第110页“启用高度传感器”与“设置高度传感器”。
您想要使用高度传感器功能编辑的程序已打开。
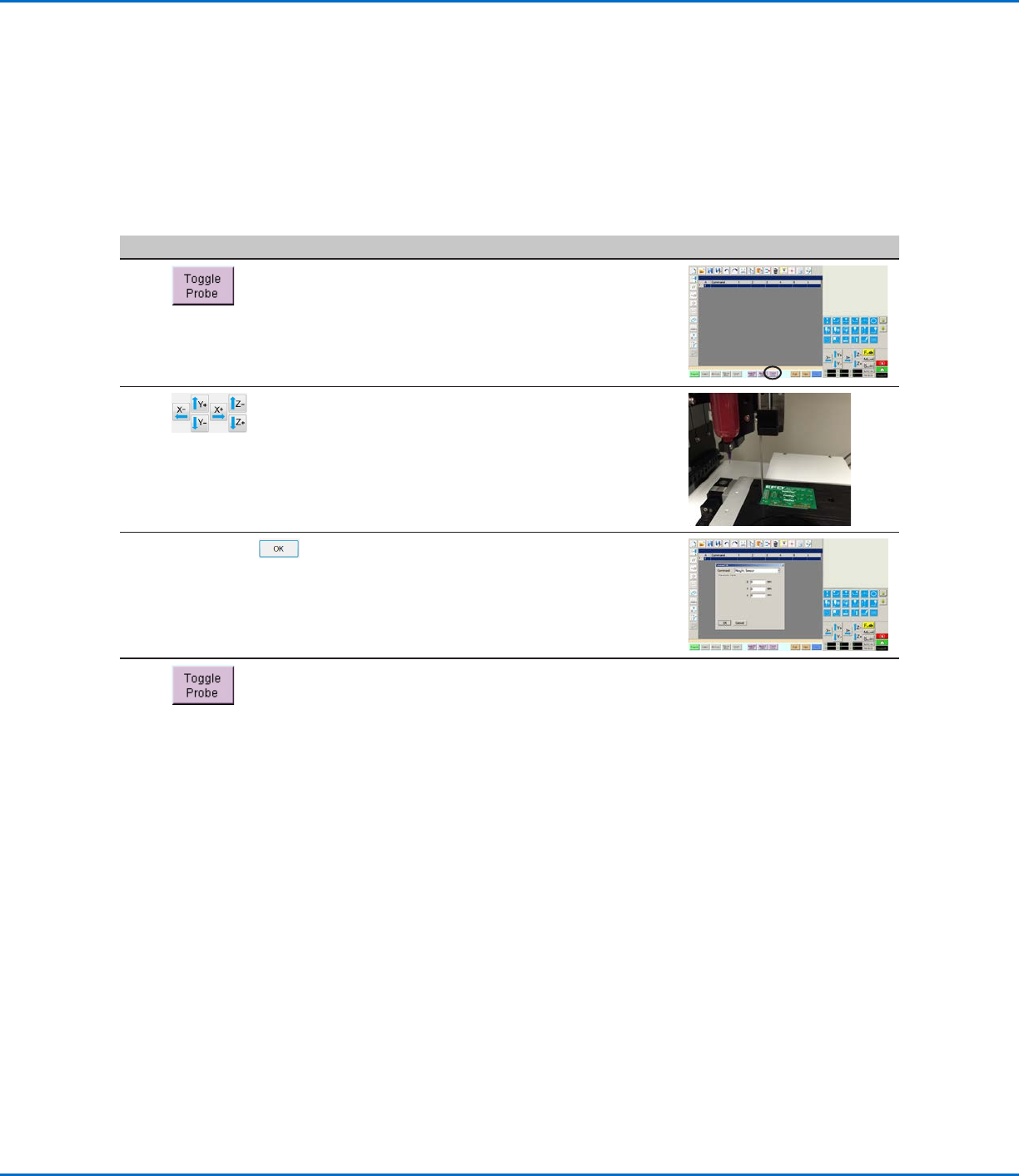
## 点击点击 操作步骤操作步骤 基准图像基准图像
1
· 单击“切换探针”。
探针从高度传感器延伸。
2
· 移动到系统应检查每个工件高度的
位置。
· 使用Z轴移动键降低探针到高于工件
上的目标位置大约10毫米(0.4英
寸)的地方。
3
HEIGHT SENSORHEIGHT SENSOR > >
· 双击您想插入高度传感器命令的地址
行,然后从下拉菜单中选择“高度传
感器”。
· 点击“确认”接受XYZ值。
4
· 点击“切换探针”收回探针。
每次运行该程序时,系统都将检查工
件高度。
EV系列自动点胶系统
www.nordsonefd.com/cn china@nordsonefd.com +86 (21) 3866 9006 诺信EFD在全球范围内销售专业点胶系统并提供技术支持服务
114
附录G - I/O引脚功能设置附录G - I/O引脚功能设置
I/O引脚功能可通过系统设置画面上的“专家”菜单进入,该功能提供了一
套可以被分配至可用的输入和输出的I/O端口的用户可配置的条件。这些条
件影响机器人操作。
IO引脚功能配置IO引脚功能配置
输入配置输入配置 描述描述
Input (输入) 默认设置
Start (开始) 开始执行点胶程序的信号。
Door (门) 停止执行点胶程序的信号。该配置用于与“开门”输出配置串联。
Stop (停止) 停止执行点胶程序的信号。
Home (首页) 点胶程序停止后回到主页/重新初始化机器人的信号。
Table Ready (复位就绪) 表明该系统可以执行点胶程序的信号。如果输入信号关闭,将不会执行点胶程序。这个配置用于
串联“复位就绪”的输出配置。
Pause (暂停) 暂停执行点胶程序的信号。
Call Program (调用程序) 用于启动不同程序的信号。 使用“专家”菜单中的“调用程序”选项可指定要调用的程序。
输出配置输出配置 描述描述
Output (输出) 默认设置
Emergency (紧急) 表明机器人已经停止的信号。
EMG-B 表明机器人上的紧急停止按钮被按下的信号。
Running (运行) 表明点胶程序当前正在执行的信号。
Homing (返回) 表明机器人重新初始化/移动到首页位置的信号。
Standby (待机) 表明机器人在待机(空闲)位置的信号。
Pause (暂停) 表明点胶程序已暂停的信号。
System Start (系统启动) 表明DispenseMotion软件已打开和运行的信号。
Table Ready (复位就绪) 表明该系统可以执行点胶程序的信号。这个配置用于串联“复位就绪”的输入配置。
Door Open (开门) 表明门已打开的信号。此设置用于串联门输入设置
No Start Trigger
(无启动触发信号)
表明“复位就绪”输入信号开启时,程序才能运行的信号。当“复位就绪”输入开启时,“无启
动触发信号”开关关闭。这个配置必须和“复位就绪”输入和输出配置一起使用。
Teach Mode (教导模式) 表明机器人处于教导模式的信号。当外部启动/停止控制器出现时,可以使用该信号。
Calibration Execution
(校准执行)
表明机器人正在执行“针头Z轴检测”或“针头XY轴调整”的信号。
Positional Error
(坐标信号错误)
程序执行通用超限预警发生后产生的超限预警的信号。
In Home (起始位置) 指示针头位于停驻位置的信号。
EV系列自动点胶系统
www.nordsonefd.com/cn china@nordsonefd.com +86 (21) 3866 9006 诺信EFD在全球范围内销售专业点胶系统并提供技术支持服务
115
重新配置输入/输出重新配置输入/输出
前提条件前提条件
系统已正确设置。请参见第42页”设置和校准系统(必需)”。
##
点击点击 操作步骤操作步骤 基准图像基准图像
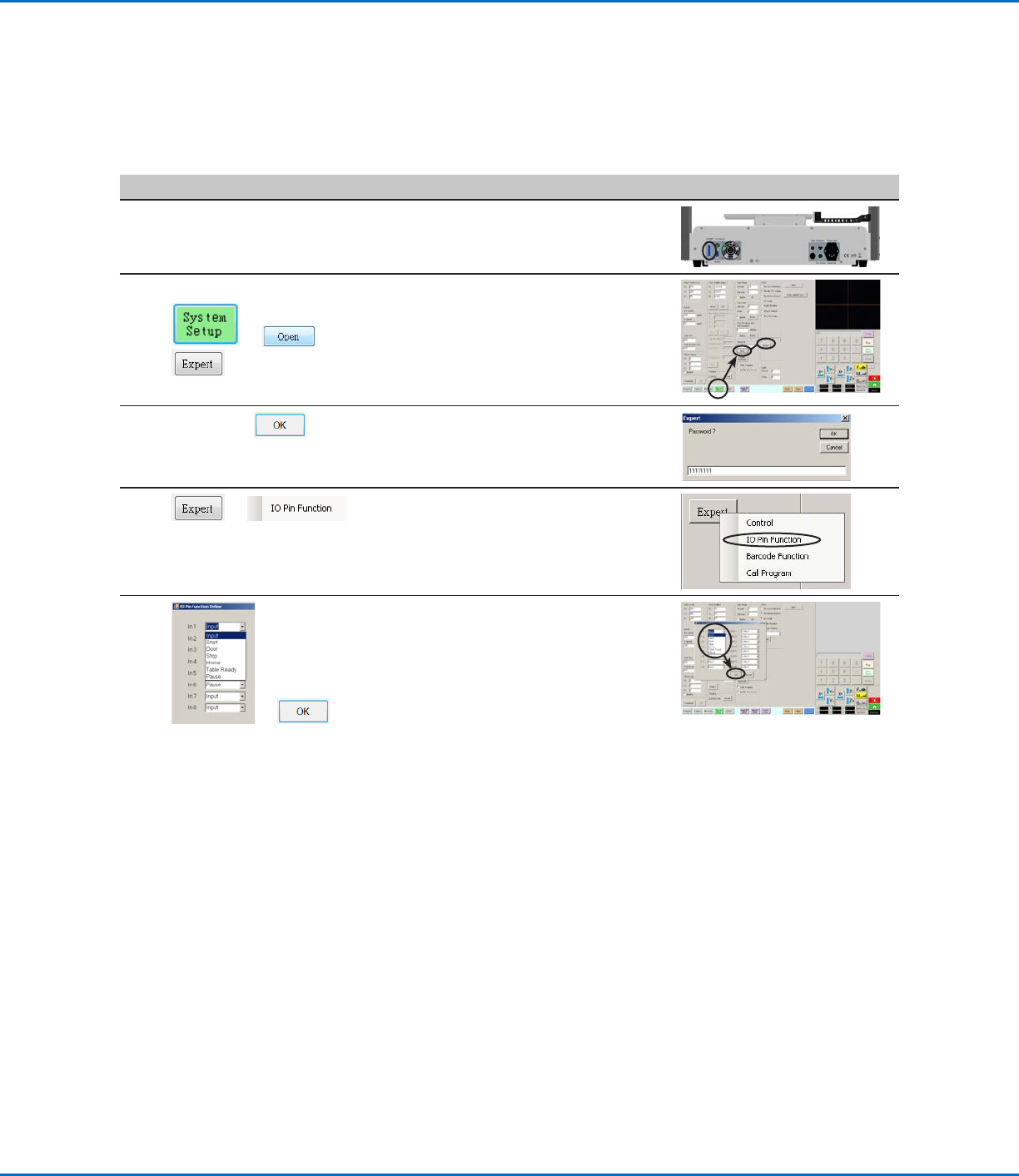
1
· 将信号线连接到机器人背后的/O端口。
2
> > > >
· 点击“系统设置(SYSTEM SETUP)>打
开(OPEN)>专家(EXPERT)”。
3
11111111 > 11111111 >
· 输入11111111,然后点击“确认
(OK)”。
4
> >
· 点击“专家”,然后点击“IO引脚功
能”。
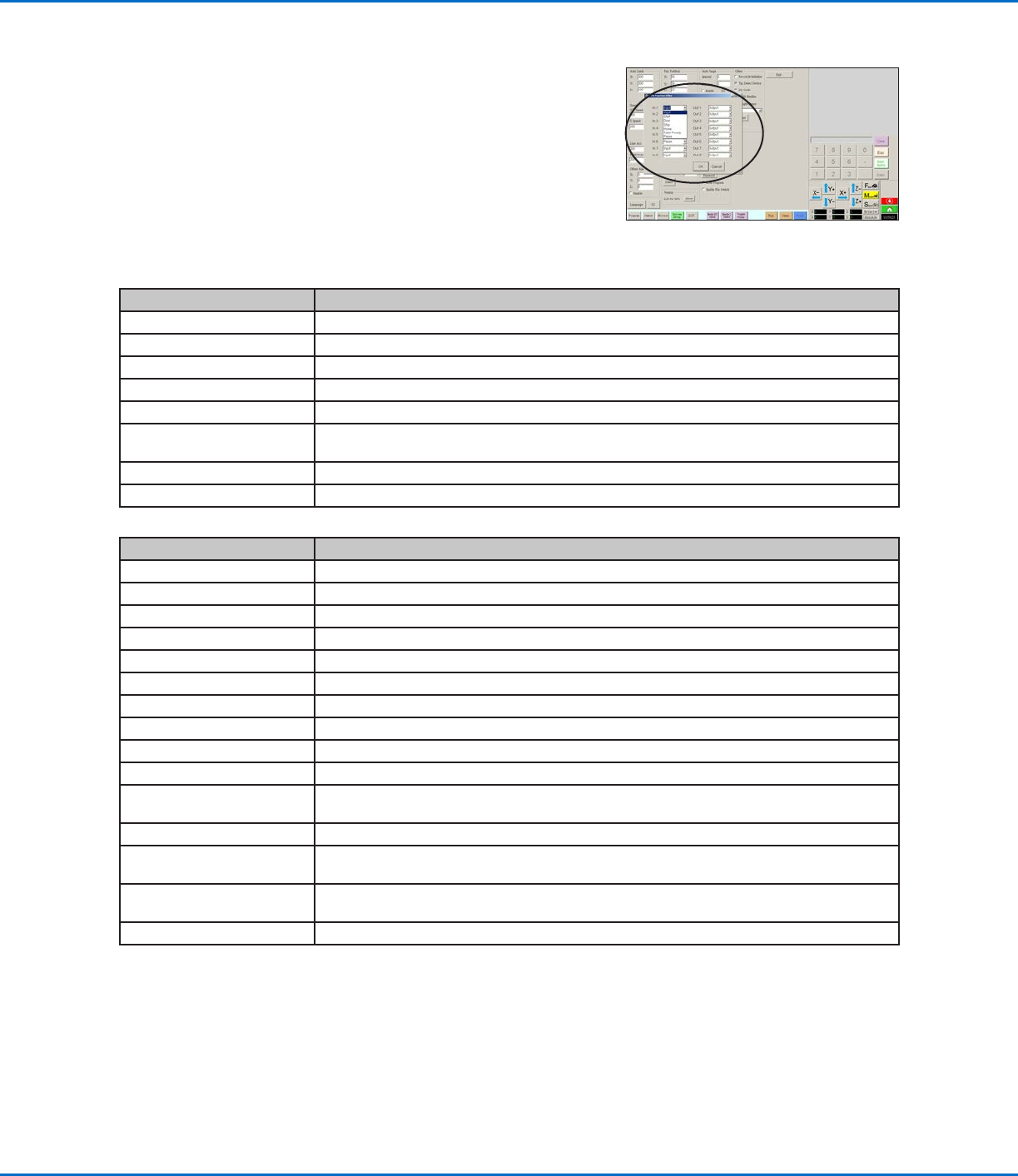
5
> >
· 点击输入或输出进行配置,并从下拉菜
单中选择配置。请参见第114页“IO引
脚功能配置”查看配置选项描述。
· 点击“OK”。
附录G - I/O引脚功能设置(续)附录G - I/O引脚功能设置(续)