CN_Nordson_EFD_EV_Series_Operating_Manual.pdf - 第44页
EV系列自动点胶系统 www.nordsonefd.com/cn china@nordsonefd.com +86 (21) 3866 9006 诺信 EFD 在全球范围内销售专业点胶系统并提供技术支持服务 44 机械手初始设置(“步骤2”选项卡):(仅限配备针头探测器的EV系统)设置针头探测器 机械手初始设置(“步骤2”选项卡):(仅限配备针头探测器的EV系统)设置针头探测器 重要信息:如果您的系统不包括针头探测器,请跳至第45页的“…
EV系列自动点胶系统
www.nordsonefd.com/cn china@nordsonefd.com +86 (21) 3866 9006 诺信EFD在全球范围内销售专业点胶系统并提供技术支持服务
43
使用机械手初始设置向导设置系统使用机械手初始设置向导设置系统
机械手初始启动向导将引导您完成正确设置系统所需的所有步骤,包括偏移的校准和设置。
机械手初始设置(“步骤 1”选项卡): 打开机械手初始设置向导并对摄像头进行聚焦机械手初始设置(“步骤 1”选项卡): 打开机械手初始设置向导并对摄像头进行聚焦
## 点击点击 操作步骤操作步骤 基准图像基准图像
1
> > > >
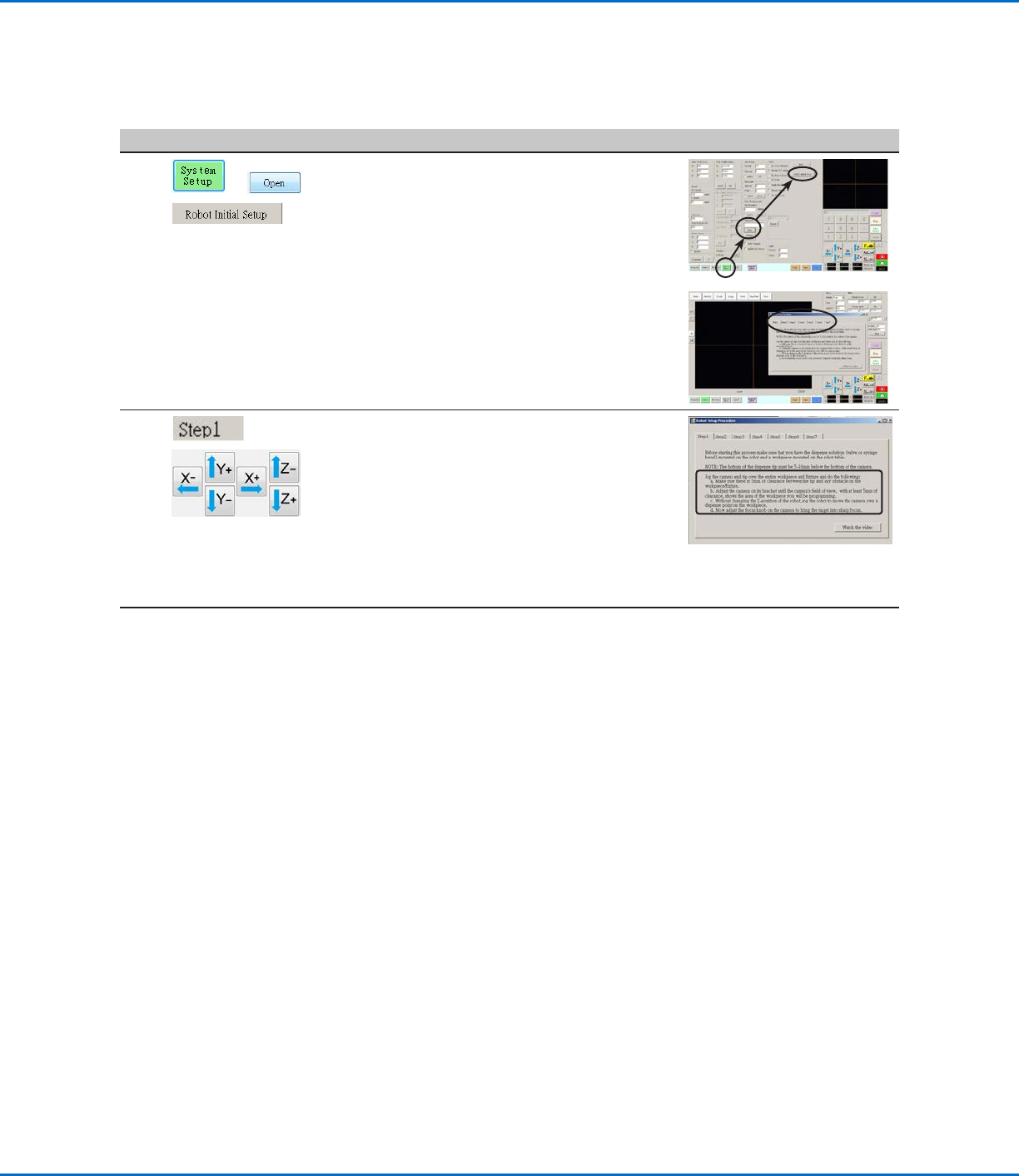
· 单击“系统设置”>“打开”>“机械手初始
设置”。
机械手初始设置向导将会打开。
· 执行选项卡1–6上的操作,每次一个选项
卡。从下一步起,本手册中也提供了这些操
作,供您在需要时参考。
注:注:单击后,向导按钮将更改为蓝色。要重
新启动向导而不将其关闭,请单击“重置颜
色”以将所有选择恢复为其默认状态。
2
> >
· 单击“步骤1”选项卡。
· 使针头在整个工件上微动,以确保针头底部
和工件最高部分之间有至少5 mm的间隙。
· 调整支架上的摄像头,直到摄像头的视野显
示要设置或编程的正确工件区域。
· 将针头微动到适当位置以点涂测试胶点。
· 对屏幕上的图像进行准确聚焦。有关摄像头
聚焦的说明,请根据需要参阅第17页的“摄
像头”。
3
· 继续第44页的“机械手初始设置(‘步骤2’
选项卡):(仅限配备针头探测器的EV系
统)设置针头探测器”。
EV系列自动点胶系统
www.nordsonefd.com/cn china@nordsonefd.com +86 (21) 3866 9006 诺信EFD在全球范围内销售专业点胶系统并提供技术支持服务
44
机械手初始设置(“步骤2”选项卡):(仅限配备针头探测器的EV系统)设置针头探测器机械手初始设置(“步骤2”选项卡):(仅限配备针头探测器的EV系统)设置针头探测器
重要信息:如果您的系统不包括针头探测器,请跳至第45页的“机械手初始设置(‘步骤3’选项卡):设置摄像头针重要信息:如果您的系统不包括针头探测器,请跳至第45页的“机械手初始设置(‘步骤3’选项卡):设置摄像头针
头偏移”。头偏移”。
## 点击点击 操作步骤操作步骤 基准图像基准图像
1
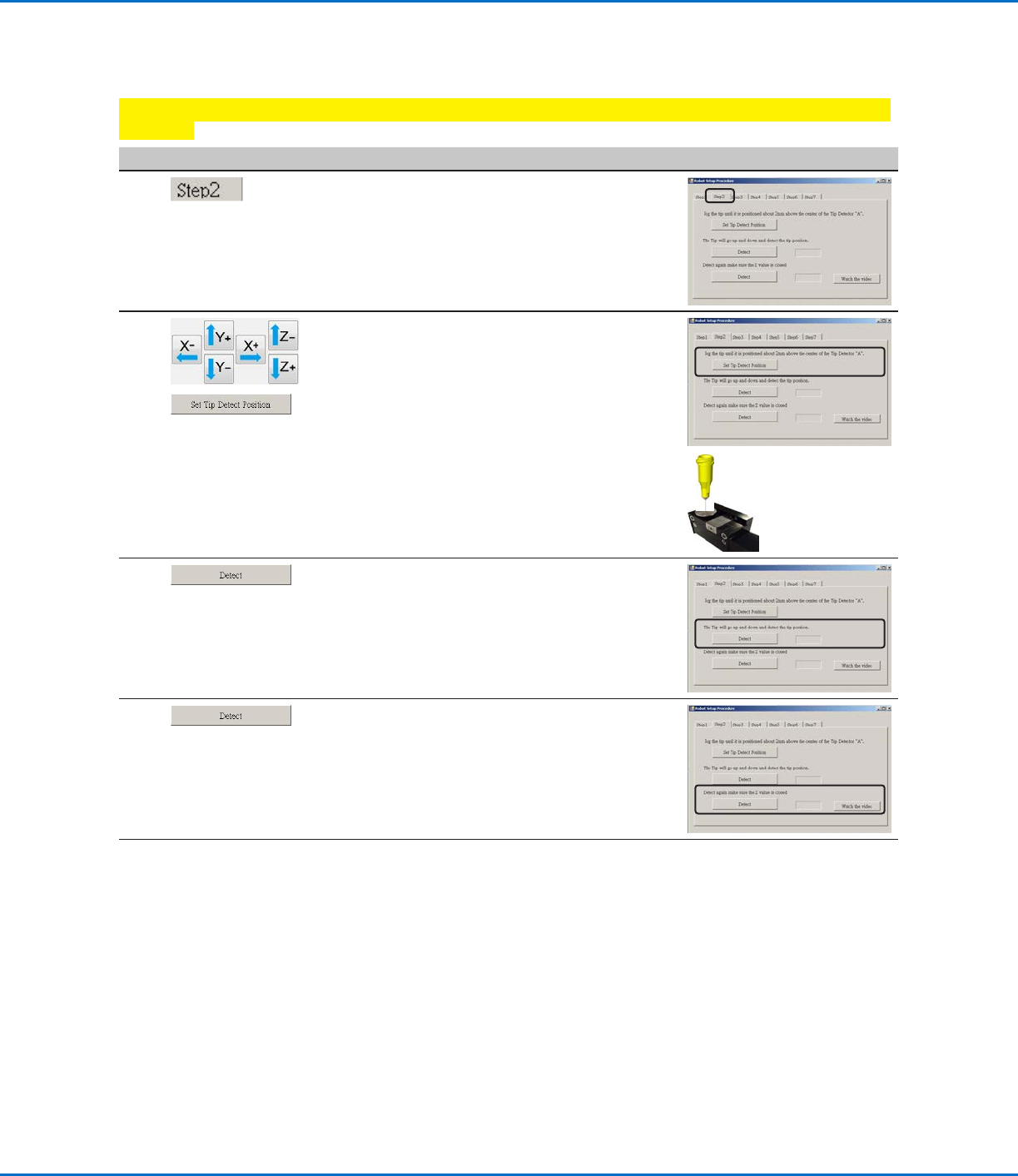
· 单击“步骤2”选项卡。
2
> >
· 微动针头,直到将其定位在针头探测器的传
感器上方大约2 mm的位置。
· 单击“设置针头检测位置”。
3
· 单击“检测”。
针头将与传感器接触以检测针头位置,系统
将在“检测”按钮旁边显示针头偏移值。
4
· 再次单击“检测”。
系统将会确认针头偏移设置。
5
· 继续第45页的“机械手初始设置(‘步骤3’
选项卡):设置摄像头针头偏移”。
使用机械手初始设置向导设置系统(续)使用机械手初始设置向导设置系统(续)
EV系列自动点胶系统
www.nordsonefd.com/cn china@nordsonefd.com +86 (21) 3866 9006 诺信EFD在全球范围内销售专业点胶系统并提供技术支持服务
45
机械手初始设置(“步骤3”选项卡):设置摄像头针头偏移机械手初始设置(“步骤3”选项卡):设置摄像头针头偏移
## 点击点击 操作步骤操作步骤 基准图像基准图像
1
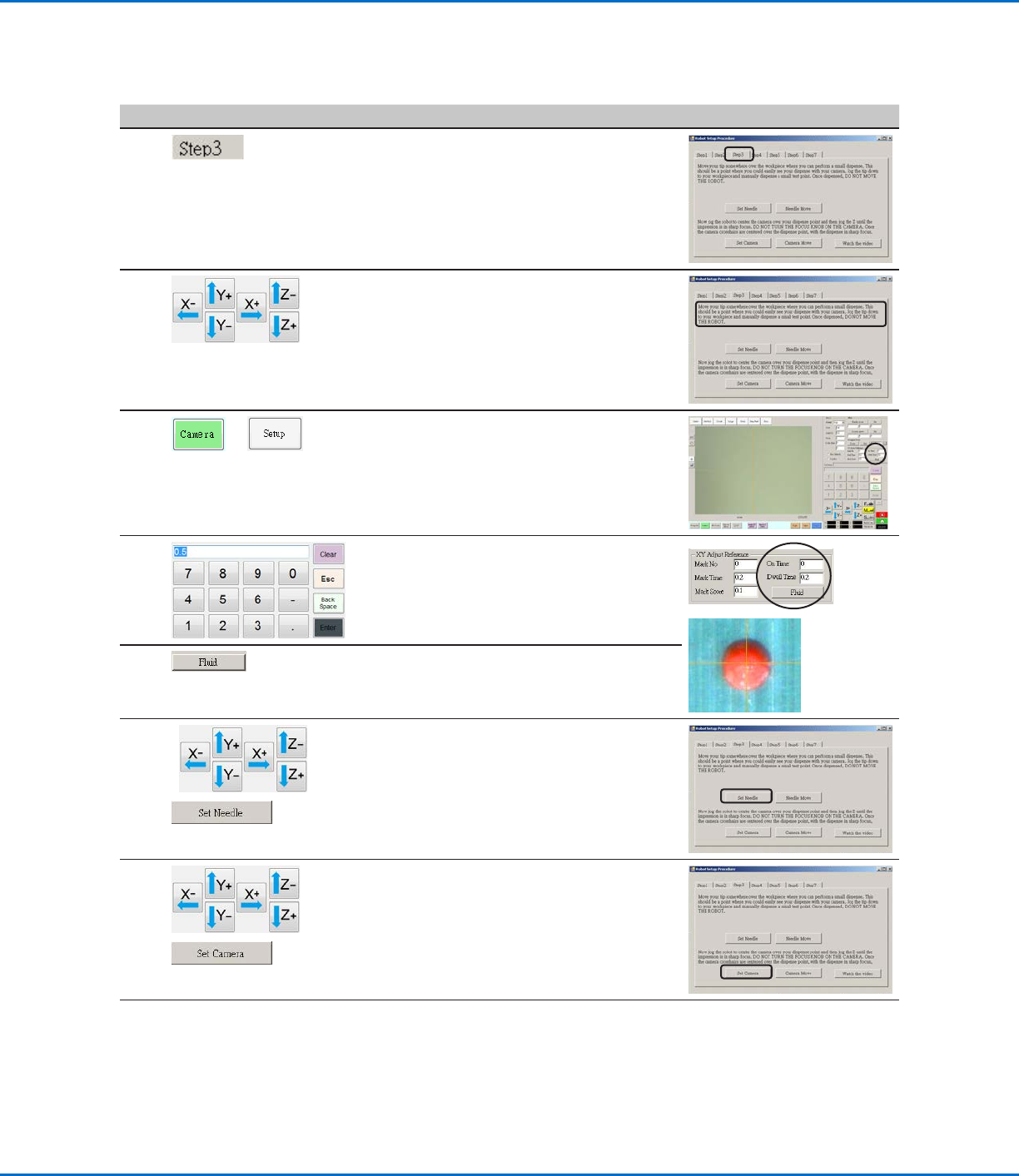
· 单击“步骤3”选项卡。
2
· 将针头微动到工作台面上的适当位置以点涂
流体测试胶点。
3
> >
· 单击“摄像头”选项卡,然后单击“摄像
头”屏幕顶部的“设置”。
您将使用“XY 调整参考”下面的字段点涂流
体测试胶点。
4
· 使用键盘输入下面推荐的胶点参数:
- 接通时间:0.5
- 停留时间:0.2
5
· 单击“流体”以点涂流体胶点。
6
>>
· 微动针头,直到将其定位在胶点上方大约
2 mm的位置。
· 单击“设置撞针”。
7
> >
· 微动摄像头,直到摄像头瞄准线位于胶点的
中心。
· 聚焦摄像头,直到胶点图像变得清晰。有关
摄像头聚焦的说明,请根据需要参阅第17页
的“摄像头”。
· 单击“设置摄像头”。
转下页
使用机械手初始设置向导设置系统(续)使用机械手初始设置向导设置系统(续)