SM321 Service-CHI.pdf - 第43页
2-15 3. X , OP <Ready> , 必 须 执 行 Skew 。 Skew 是 指 设 备 移 动 后 X 轴 机 架 对 Y1 轴 和 Y2 轴 不 处 于 垂 直 状 态 时 的 歪 斜 补 偿 。 在设备的最初设置及移动 后必须执行 Skew 。对 Y 轴的 Ske w Co mpensation 执行方 法如下 ; 最初设 置 及移动 设 备后, 执行 初始 化之 前必须 要执 行 <S k ew…
Samsung Component Placer SM321 Service Manual
2-14
2.1.5. Motor I/O 确认及 Skew Compensation
2.1.5.1. 作业顺序
1. 在打开Main Switch前,再次检查确定设备内部或传送装置(Conveyor)上是否有
任何障碍.
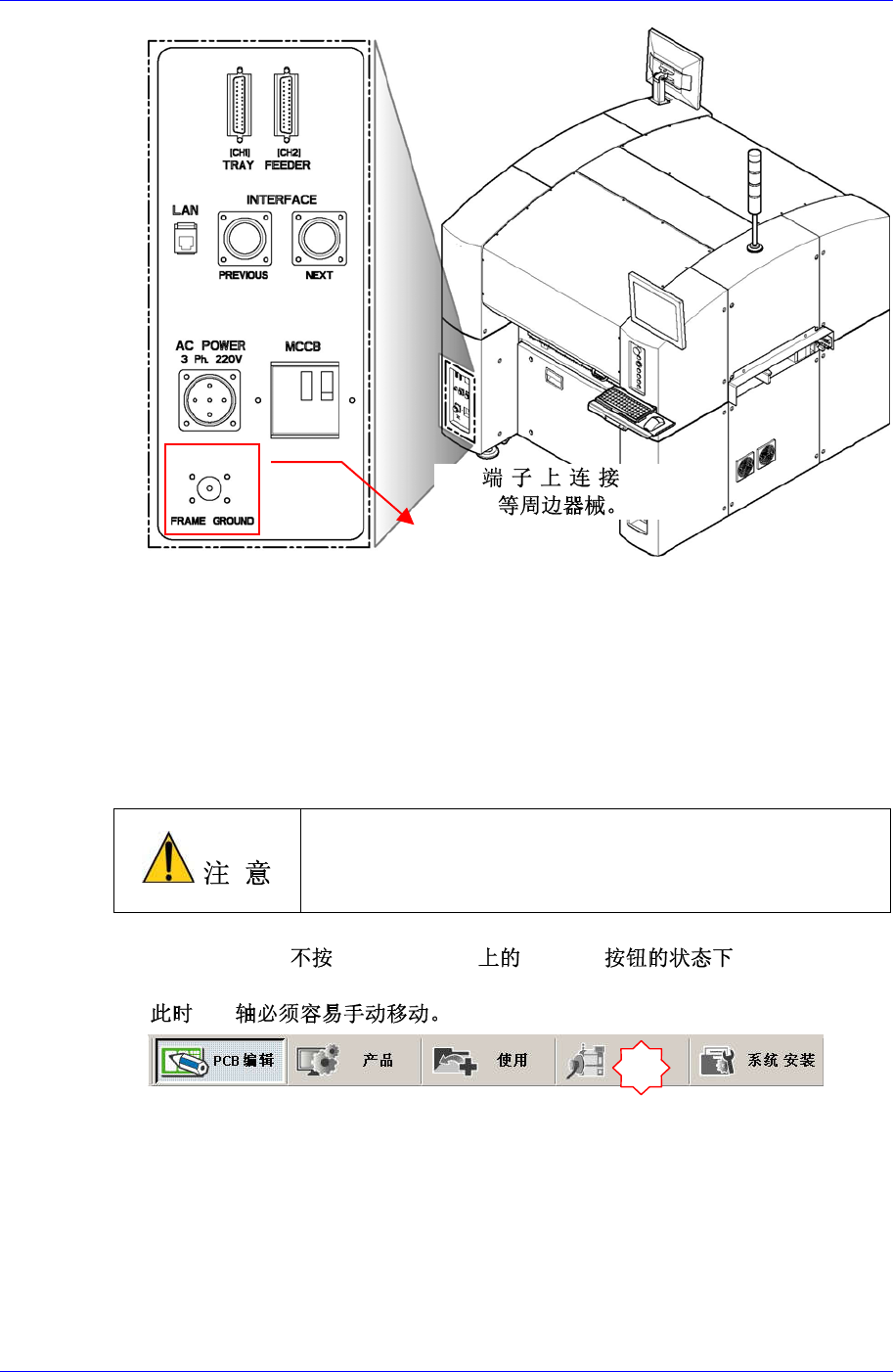
2. 如果设备周边是干净的,打开Main Switch。 连接设备电源 此时请确认前、后
面紧急开关是否已撤销,并确认前、后门是否已关闭。
如果在打开Main Switch前不对电源及设备内部进行确认,有
可能造成设备损伤及人员受伤。在打开Main Switch前一定要
对设备内部及周边进行确认。
1.
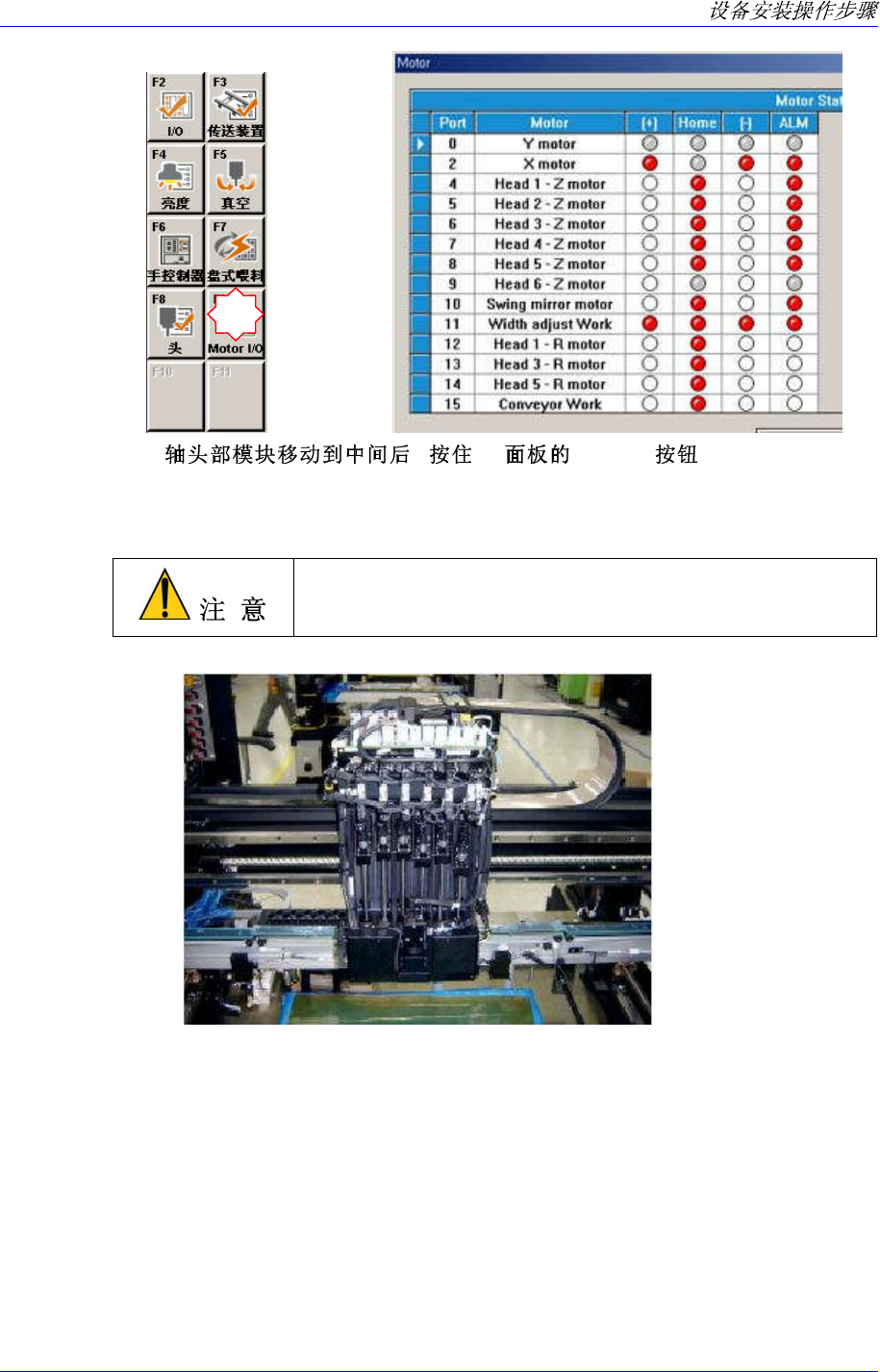
全体程序完成 Front OP Panel <Ready> , 要确认Motor的
I/O。 手动传感器对各Motor确认+/- Limit Sensor及Home Sensor是否正常工作。
, XY
FG Tray
Feeder
1
2-15
3. X , OP <Ready> , 必须执行Skew。
Skew是指设备移动后X轴机架对Y1轴和Y2轴不处于垂直状态时的歪斜补偿。
在设备的最初设置及移动后必须执行Skew。对Y轴的Skew Compensation执行方
法如下;
最初设置及移动设备后,执行初始化之前必须要执行<Skew
Compensation>。否则设备启动时受到损伤。
请把X Frame移动到Y轴中央,Head Assembly置于X 轴中央。
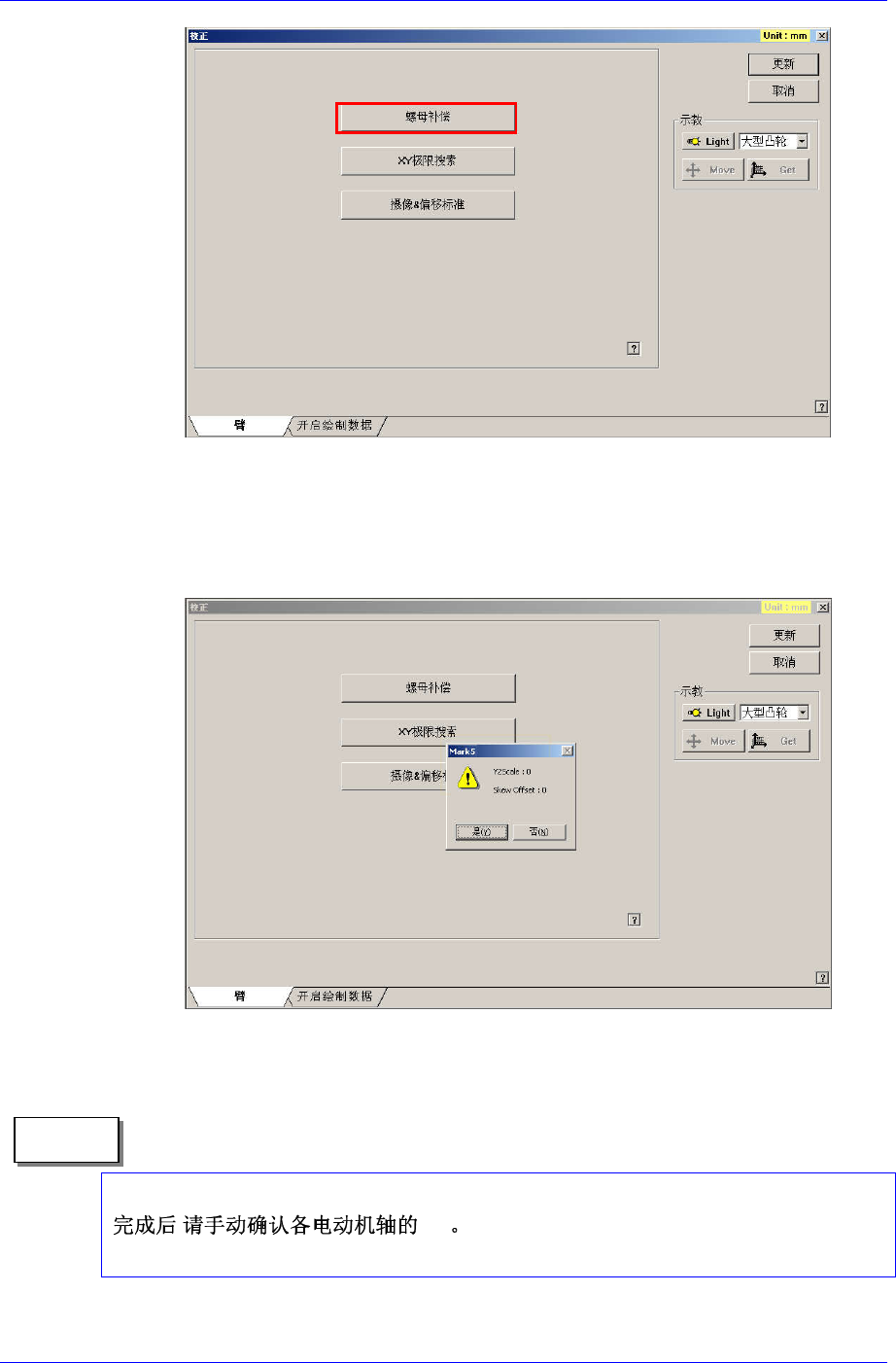
System Setup菜单的<校正(Calibration)>子菜单中选择<Gantry>tap对话框。
那么显示如下画面。
2
Samsung Component Placer SM321 Service Manual
请点击<Skew Compensation>按钮。那么自动执行对Z轴的初始化,Y1轴电
动机旋转并感知Y Home传感器为止移动X机架,Home传感器感知后,再反
方向移动到Y轴Home传感器感知为止。
然 后 如 下 显 示 Skew 信 息 , 问 是 否 适 用该 值 。( 应 处 于 Scale 3,Offset
1400~1800以内。)
点击〈是(Y)〉按钮后再点击<Update>按钮,根据适用的Skew信息设备
重新执行初始化。
完成Skew Compensation则自动完成X,Y Limit Search。
, I/O
(X, Y, Z, R, SWING, MIRROR, CONVEYOR 轴)
参 照
2-16