SM471PLUS_Admin(Chi_Ver2.3).pdf - 第390页
13-62 Fast Chip Shooter SM471 PLUS Admini st rator’s Guide 13.3.10.7. Fly Camera Offset Calibration 校正飞行相机和 Head Spindle 中心间的差距。 为校正飞行相机中心和 Head Spindle 中心的 Off set , 必 须先行 Fly Camera Calibration 和 Head Z Of fse t Calibr…
13-61
Machine Calibration
12. 请按照对磁头 1的校正方法,同样地从Head 2~10执行校正。
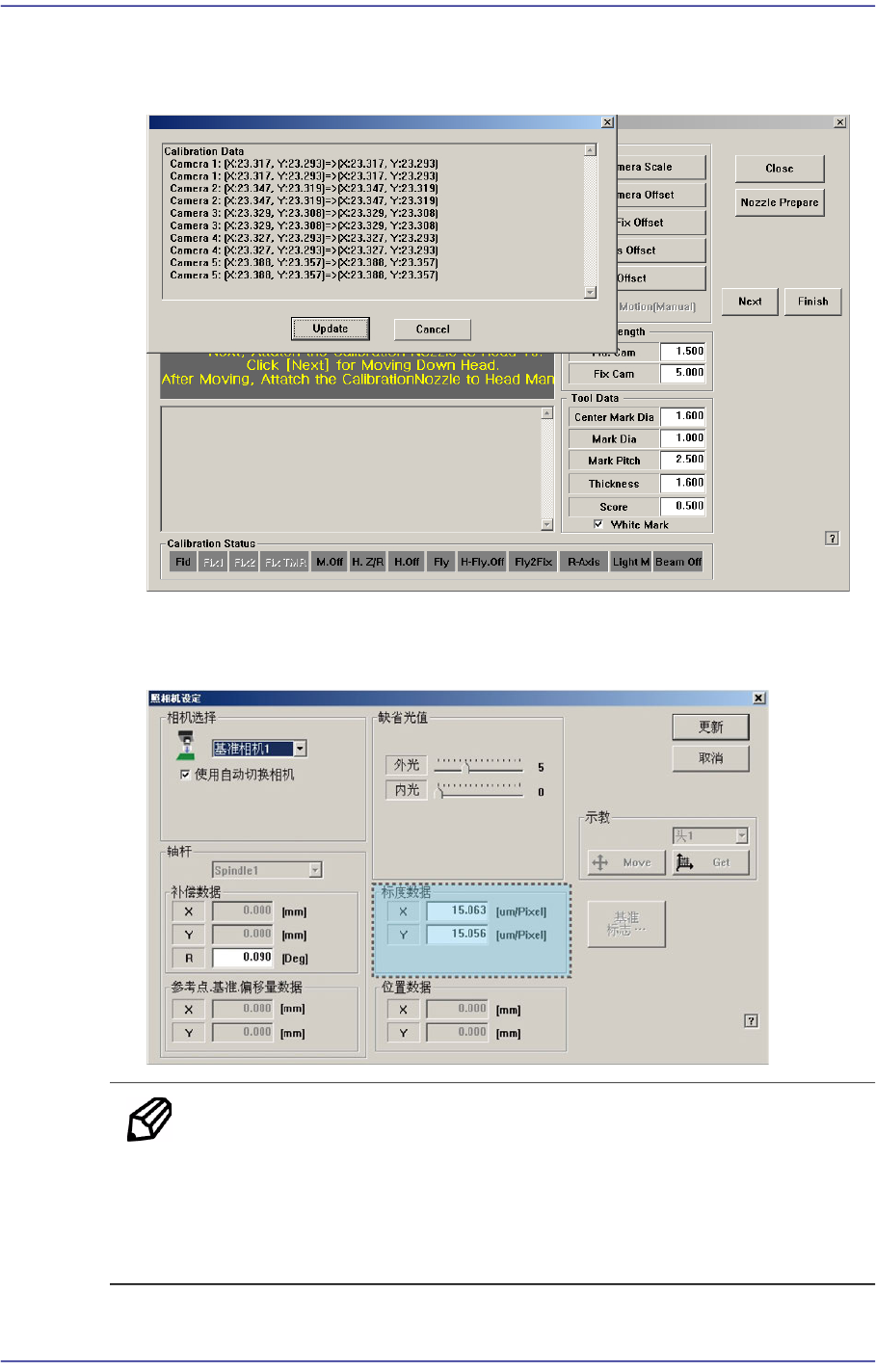
对所有飞行相机正常完成校正次序如下图显示结果值。
13. <Gantry>组合框中选择Gantry2后,与Gantry1相同的方式执行校正。
结果值在System Setup菜单的Camera对话框中可以确认。
备 注 飞行相机的校正基准值为如下
FOV 25 (MEGA)
ScaleX: 22.85~23.81 (μm/pixel)
ScaleY: 22.85~23.81 (μm/pixel)
13-62
Fast Chip Shooter SM471 PLUS Administrator’s Guide
13.3.10.7. Fly Camera Offset Calibration
校正飞行相机和Head Spindle中心间的差距。 为校正飞行相机中心和Head Spindle
中心的 Offset,必须先行Fly Camera Calibration和 Head Z Offset Calibration 应该使用
特制的器具(Calibration Tool)。
使用Head的Reference Fiducail Mark时,同时执行Reference Fiducial Offset 校正。
是否使用Head的Reference Fiducial Mark,在System Setup菜单的Camera对话框中进
行设置。Default值为’Use’。
下面是 Fly-Camera Offset 的校正步骤。
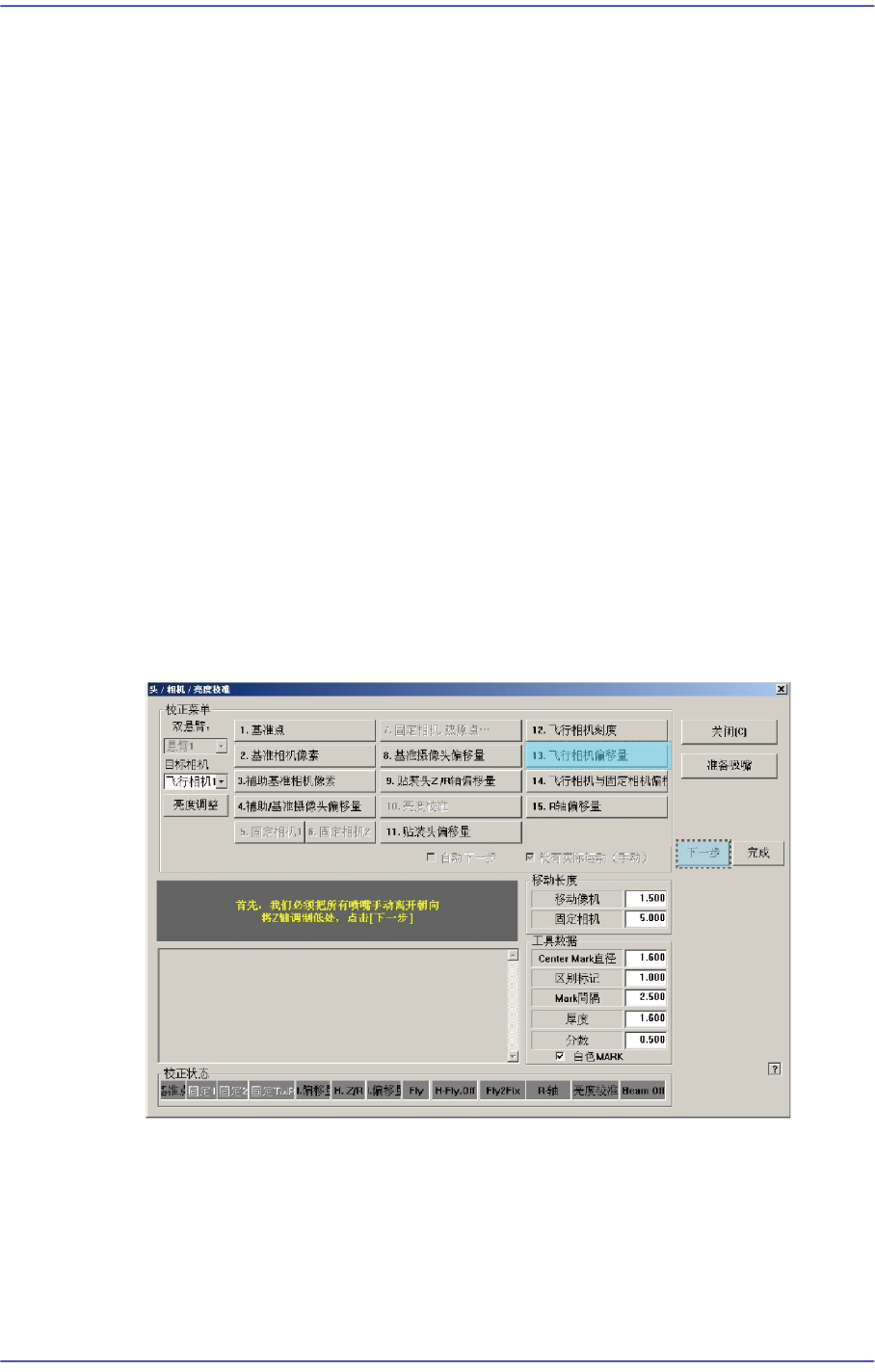
1. 点击<准备吸嘴>按钮,在ANC1号孔中插入CN400吸嘴。选择<自动下一步>
校验框后,
2. 点击<13. Fly Camera Offset> 按钮,则对选择的 Gantry自动执行校正。选择 <没
有实际运动(手动)>校验框后,执行校正会在各Head手动插入吸嘴,并点击<
下个>进入下一个阶段。不选 <自动
下一步> 或<没有实际运动(手动)>中的任
何校验框的状态下执行校正时,虽然对当前被选的Head自动更换吸嘴,但要点
击<下个>按钮才能执行下一个阶段。点击<13. Fly Camera Offset>按钮则显示”
首先,我们必须把所有吸嘴手动离开朝向。将Z轴调制低处,点击[下一步]”消
息。为了手动除去所有贴装在磁头的吸嘴,拉下磁头的Z轴请点击<下个>按
钮。
3. 那么, Head Assembly移动到设备指定的位置后,拉下所有Z轴。此时,请手动除
去已贴装的所有吸嘴。
4. 显示 “下一步,将标准工具粘贴在头部1。点击[下一步]向下移动。移动后,手动
粘贴工具到首部。” 消息。 在磁头1号的吸嘴槽上手动贴装CN400吸嘴后点击<
下个> 按钮。
13-63
Machine Calibration
5. 显示“排列高度上升,镜像关闭。移动,点击 [下一步]”消息。请点击<下个>按
钮。
6. 显示 “排列高度上升,镜像关闭。移动,点击 [下一步]” 消息。 请点击<下个>按
钮。
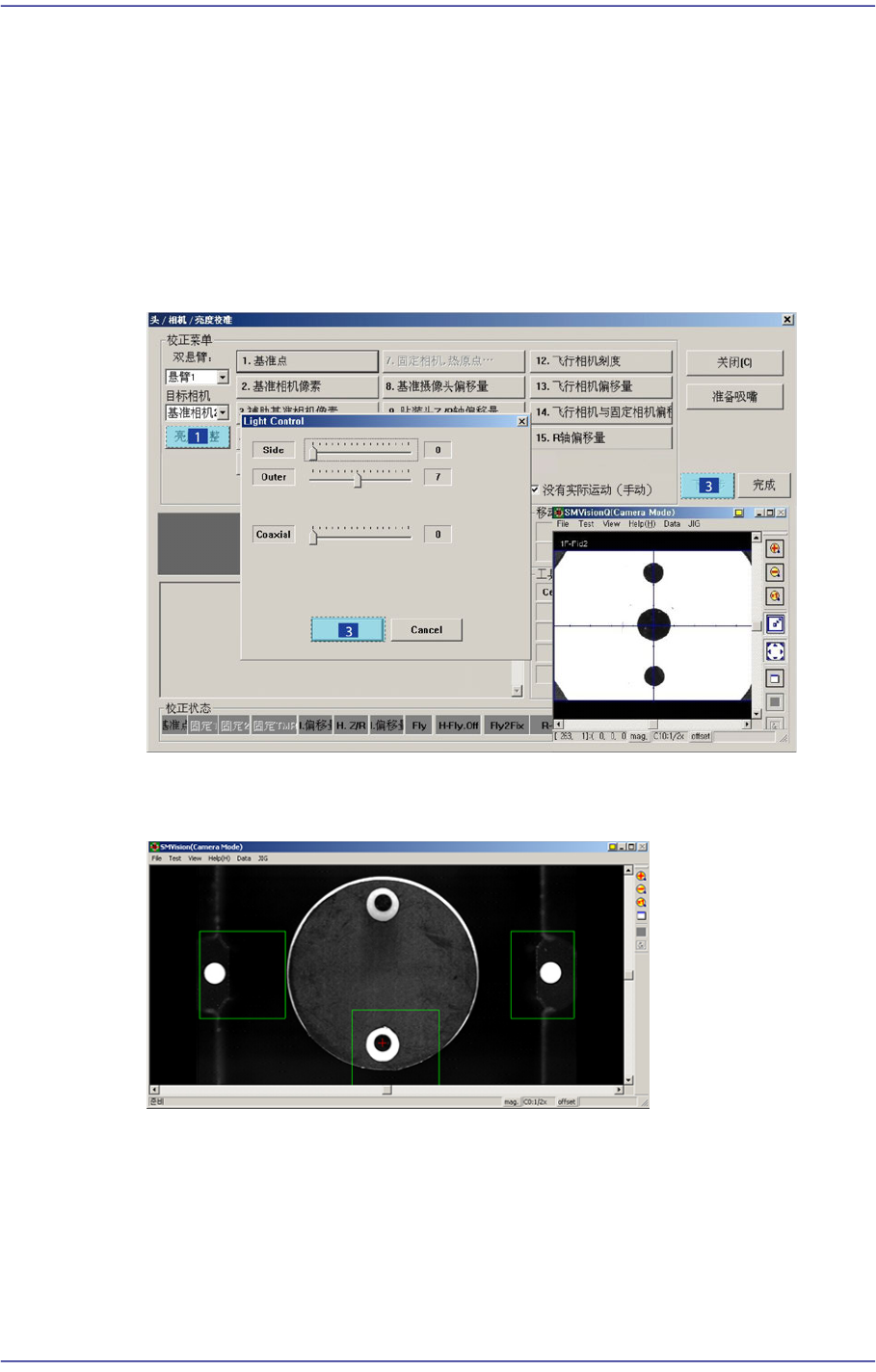
那么,磁头1上升到飞行相机的Align高度,关闭 Mirror。 然后在消息窗显示”准
备标准。对于标准,点击[下一步].” 消息。此时在 <目标摄像>组合框中选择”飞
行相机1”点击 <亮度>按钮,在”亮度控制”对话框中’SMVision’窗口 显示的
Calibration Tool上的 Fiducial Mark明显为止调整照明亮度后点击<下个>按钮。
7. 校正首先识别Head的Reference Fiducial Mark测量飞行相机的R Offset。之后用
飞行相机识别校正 Tool底面的Fiducial Mark 2点测量飞行相机的Scale值。
8. 自动执行 Calibration后完成 Calibration则如下图显示结果值,请点击<下个> 按
钮。
9. 显示”下一步, 把校校正工具从H1取下, 点击[下一步]头将向下移动。移动后,
用手取下工具。”消息。为了在磁头1号的吸嘴支架手动除去Calibration Tool请
点击<下个>按钮。
10. 请按照对磁头 1的校正方法,同样地从Head 2~10执行校正。