00193928-01.pdf - 第133页
Návod k obs luze SIPLACE HF -série 3 Technická data Verze software SR.505.xx Vydání 05/2004 CZ 3.10 Portály 133 Osa Y se skládá v p odstat ě z ná sledují cích hla vních skupin: 3 – Lineá rní pohon s per manentním magnet …
3 Technická data Návod k obsluze SIPLACE HF-série
3.10 Portály Verze software SR.505.xx Vydání 05/2004 CZ
132
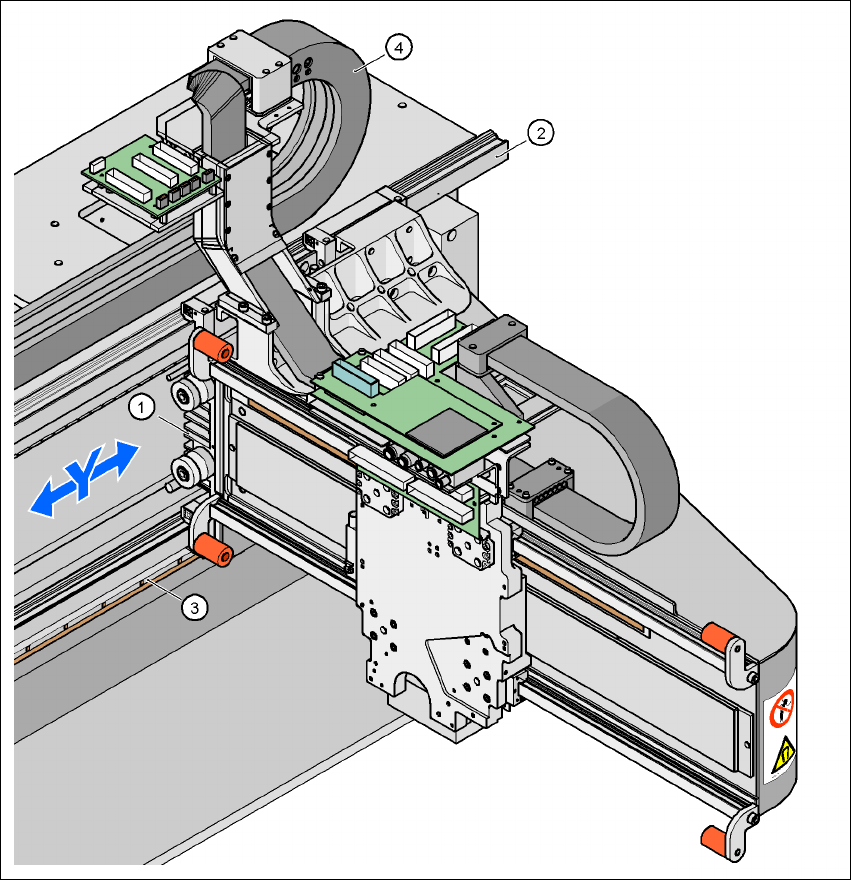
3.10.5 Konstrukce osy Y
3
Obr. 3.10 - 4 Konstrukce osy Y
3
(1) Lineární pohon s permanentním magnetem
(2) Vedení
(3) Lineární odměřovací systém
(4) Zavěšení kabelu
Návod k obsluze SIPLACE HF-série 3 Technická data
Verze software SR.505.xx Vydání 05/2004 CZ 3.10 Portály
133
Osa Y se skládá v podstatě z následujících hlavních skupin: 3
– Lineární pohon s permanentním magnetem (1)
– Vedení (2)
– Lineární odměřovací systém (3)
–Zavěšení kabelu (4)
3
Osa Y je poháněná lineárním motorem. Sekundární díl pohonu se skládá z permanentních
magnetů a je montován na stojan stroje. Primární díl je přišroubován k portálu. 3
3.10.6 Technická data - Y-osa
Pohon Přímo, lineární motor
Max. rychlost 2,5 m/sec.
Výsuv 1430 mm
Odměřovací systém Lineární kovové měřítko
Délka měřítka 1850 mm
Rozlišení 1 µm
3 Technická data Návod k obsluze SIPLACE HF-série
3.11 Rozpoznávací systémy Verze software SR.505.xx Vydání 05/2004 CZ
134
3.11 Rozpoznávací systémy
Každá 6-ti segmentová a každá 12-ti segmentová hlava Collect&Place má svůj vlastní
rozpoznávací modul součástek (viz obr. 3.6 - 3
strana 100 a obr. 3.6 - 6 strana 105). Kamera
součástek, stacionární, P&P (typ 22) 50 x 40 pro hlavu TwinHead je připevněna na rámu stroje.3
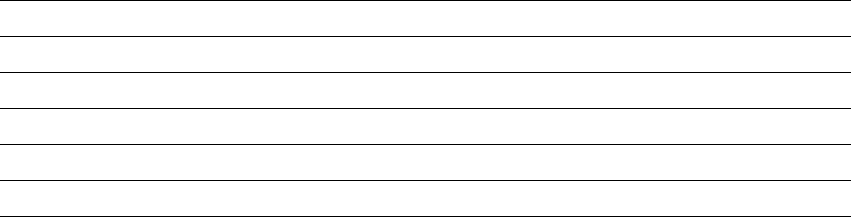
Montážní poloha kamery součástek, stacionární, P&P (typ 22) 50 x 40 3
3
3
Obr. 3.11 - 1 Montážní poloha kamery sou
č
ástek, stacionární, P&P (typ 22) 50 x 40
3
(1) Montážní poloha parkoviště 1
(2) Montážní poloha parkoviště 3
Hlava TwinHead Kamera součástek, stacionární, P&P (typ 22) 50 x 40
Oblast osazování 1 Stanoviště 1 (automat HF)
Oblast osazování 2 Stanoviště 3 (automat HF a HF/3)