19120014-CY_A01《SV660系列伺服系统》20210623_WEB.pdf - 第13页
-12- 故障 追溯 高速 比较 故障信息记录黑匣子 高速位置比较 故障发生时存储故障 运行信息到伺服。 高速比较输出 运动部件 用户复位故障 ,并恢 复正常生产。 1、技术人员到达现场,处理问题 2、发送黑匣子数据,给技术人员 电机运动至设定位置, 输出 DO 数字信号 (响应时间为 5μs) , 提供设备高速逻辑处理。 适用于飞拍, 模切等设备工艺。 故障出现 恢复生产 分析问题 0 5 10μm
-11-
安全
防护
认证
有效保护人身及设备安全
应对高污染环境,提高设备可靠性
全面的认证要求,满足设备出口需求
功能安全
IEC61508-1 SIL-3 标准
具有安全转矩关掉功能:无需输出端接触器,即可防
止在故障状态时造成触电或机械伤害。
独立风道
新增一个塑胶风道,针对电容等发热器件,同时通过
迷宫设计保证风道独立性。避免粉尘,异物等进入控
制电路。
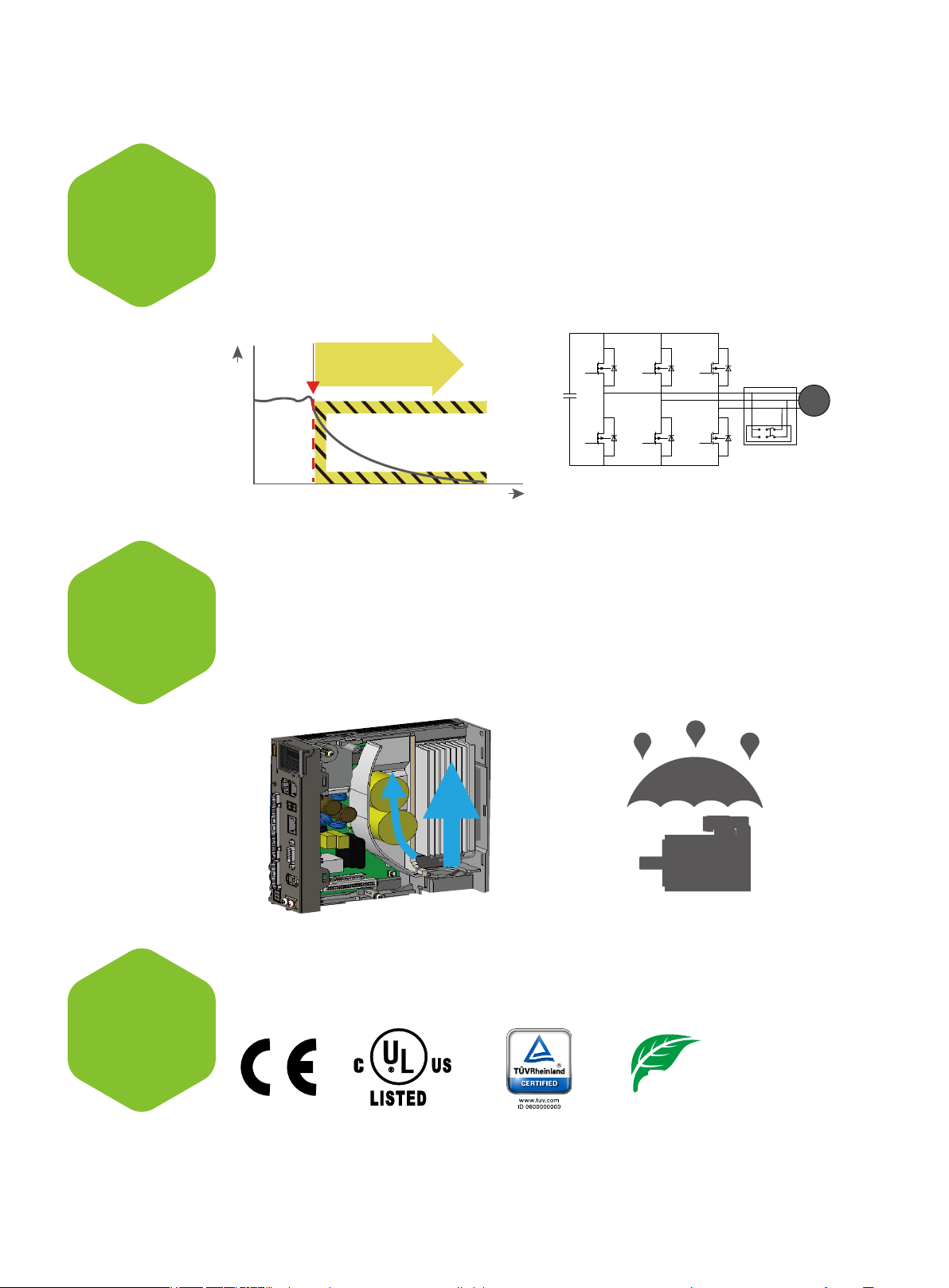
动态制动
在伺服故障、急停或停机、电机抱闸失效时,可进行
动态制动,防止电机快速旋转造成的设备损失或人员
伤害。
IP67 电机
针对 MS1 系列 H1/H4 规格电机,锁紧式端子确保电
机符合 IP67 防护等级,针对于水汽,油污,振动等
应用场合更加可靠。
STO
v
t
M
动态制动
IP67
RoHS

-12-
故障
追溯
高速
比较
故障信息记录黑匣子
高速位置比较
故障发生时存储故障
运行信息到伺服。
高速比较输出
运动部件
用户复位故障,并恢
复正常生产。
1、技术人员到达现场,处理问题
2、发送黑匣子数据,给技术人员
电机运动至设定位置,输出 DO 数字信号(响应时间为 5μs),提供设备高速逻辑处理。适用于飞拍,模切等设备工艺。
故障出现 恢复生产 分析问题
0 5 10μm
-13-
伺服驱动器和电机命名规则
伺服驱动器命名规则
电机命名规则
SV660 P S 5R5 I - **
① ② ③ ④ ⑤ ⑥
MS1 H 1 - 40B 30C B - A3 3 1 Z - *
① ② ③ ④ ⑤ ⑥ ⑦ ⑧ ⑨ ⑩
① 系列号
伺服驱动器
③ 电压等级
S:220V
T:380V
⑤ 安装方式
I:基板安装
② 产品类别
P:脉冲型
A:CANlink 总线型
C:CANopen 总线型
N:EtherCAT 总线型
④ 额定输出电流
1R6:1.6A
···
021:21A
026:26A
⑥ 非标规格
空缺:标准机
-FH:高防护机型
-FS:STO 功能安全
注:-FS 仅 SV660N 机型支持
注:-S 机型仅 MS1H1 和 MS1H4 支持
① 产品族
MS1 系列伺服电机
⑤ 额定转速(rpm)
B:×10
C:×100
例:30C:3000rpm
⑨ 制动器、油封
0:没有
1:油封
2:制动器
4:油封 + 制动器
② 产品系列
H:最高转速高于额定转速电机
V:最高转速等于额定转速电机
⑥ 电压等级(V)
B:220
D:380
⑩ 分系列号(出线形式及冷却方式)
Z:Z 系列(端子型自然冷却)
-S:导线型自然风冷
③ 惯量等级
1:低惯量、小容量
2:低惯量、中容量
3:中惯量、中容量
4:中惯量、小容量
⑦ 编码器类型
A3:23bit 多圈绝对值编码器
④ 额定功率(W)
B:×10
C:×100
例:40B:400W
⑧ 轴连接方式
3:实心、带键、带螺纹孔