TF36074_Chip Vacuum Check.pdf - 第4页
2nd SMT Engineering Division Softw are Gro up IM Operations Y AMAHA MOTOR CO., L TD MD OC-SOFT50395 4/11 3. Fun ction o ver v iew 3.1 Outline Between “a fter camera recogn ition of picked p arts” and “before mou…
2nd SMT Engineering Division Software Group
IM Operations
YAMAHA MOTOR CO., LTD
MDOC-SOFT50395
3/11
1. Model and Version
Supported models and version are as follows.
Table1.1 Model and Version
Model Software Version Note
YS12 / YS12P / YS12F
YG12 / YG12F
YS88
YS100
YS24 / YS24X
YC8
V3.45STD R1.000 or later
YSM20 V4.49STD R1.000 or later
2. Purpose of function
2.1 Background
On small chip parts such as 0603, difference of vacuum level between open and close is
too small to judge parts existence properly. Therefore, parts existence used to be checked
by camera recognition, but it couldn’t find dropped parts after recognition.
2.2 Purpose
This function enables parts existence check by vacuum level from after camera recognition
until before mounting. This will prevent mount failure and misalignment.
2nd SMT Engineering Division Software Group
IM Operations
YAMAHA MOTOR CO., LTD
MDOC-SOFT50395
4/11
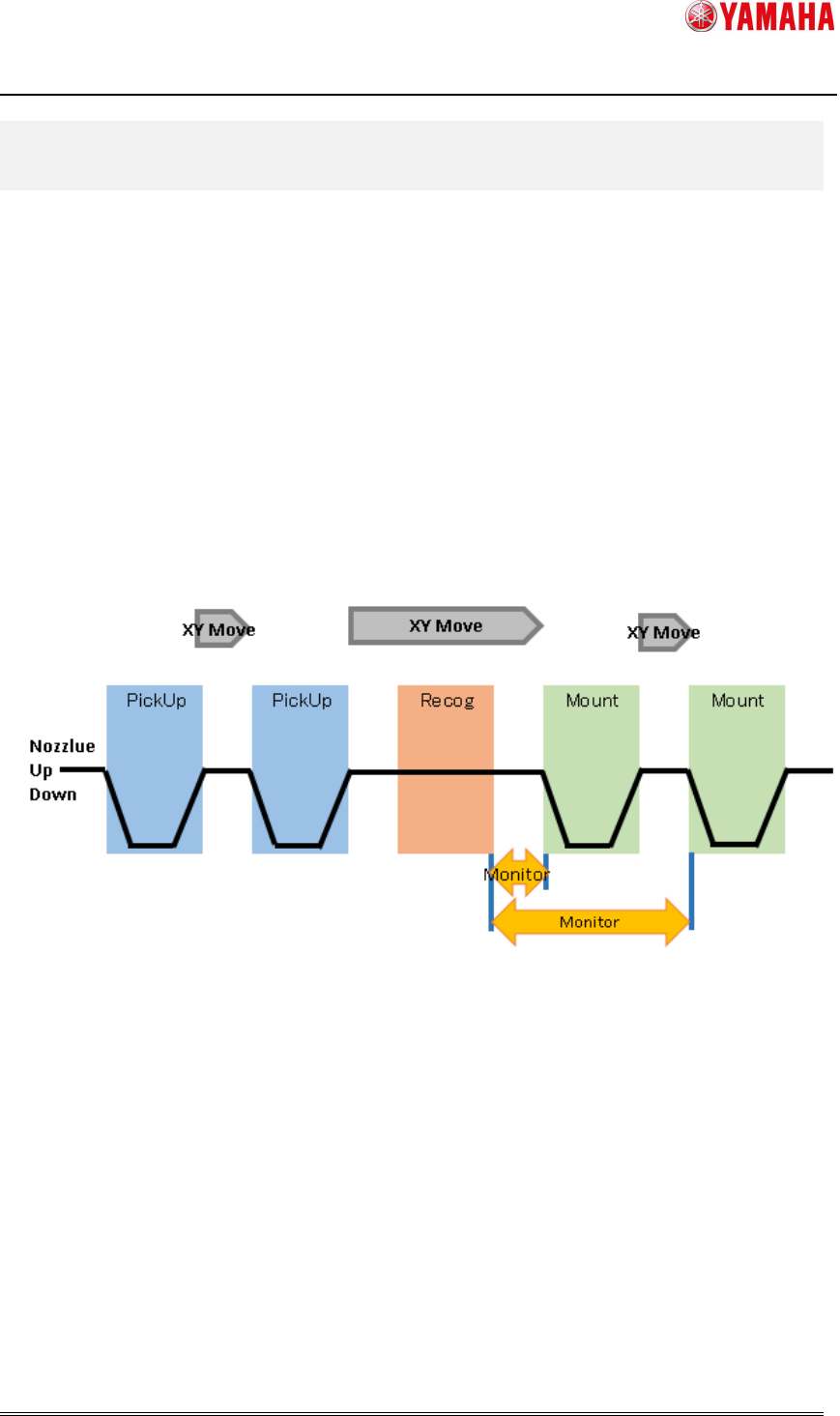
3. Function overview
3.1 Outline
Between “after camera recognition of picked parts” and “before mounting”, vacuum level is
monitored for checking of parts existence. It memorizes the highest vacuum level, and
judges “parts fall” if the vacuum level drops below a certain level(※) from the peak.
(※) Specified for each nozzle type in Machine Setting.
3.2 Period of Chip Vacuum Check
Vacuum level is monitored between “after camera recognition of picked parts” and “before
mounting” for all heads(nozzle type) that are set with [Chip Vacuum Check] active and also
picking parts.
Fig3.1
Vacuum level monitoring time
2nd SMT Engineering Division Software Group
IM Operations
YAMAHA MOTOR CO., LTD
MDOC-SOFT50395
5/11
3.3 Timing to output errors
Between “after camera recognition of picked parts” and “before mounting”, it monitors
vacuum level for checking of parts existence. The error is not output just after a chip is
dropped off. Timing to display the error is as follows.
When chip is dropped from mounting head
The error message is displayed when XY-axis arrives at the mounting position. At this
time, the error message is displayed for each error head.
When chip is dripped from other than mounting head
The error occurs when mounting of mount head is completed. At this time, the error
message is displayed for each error head.
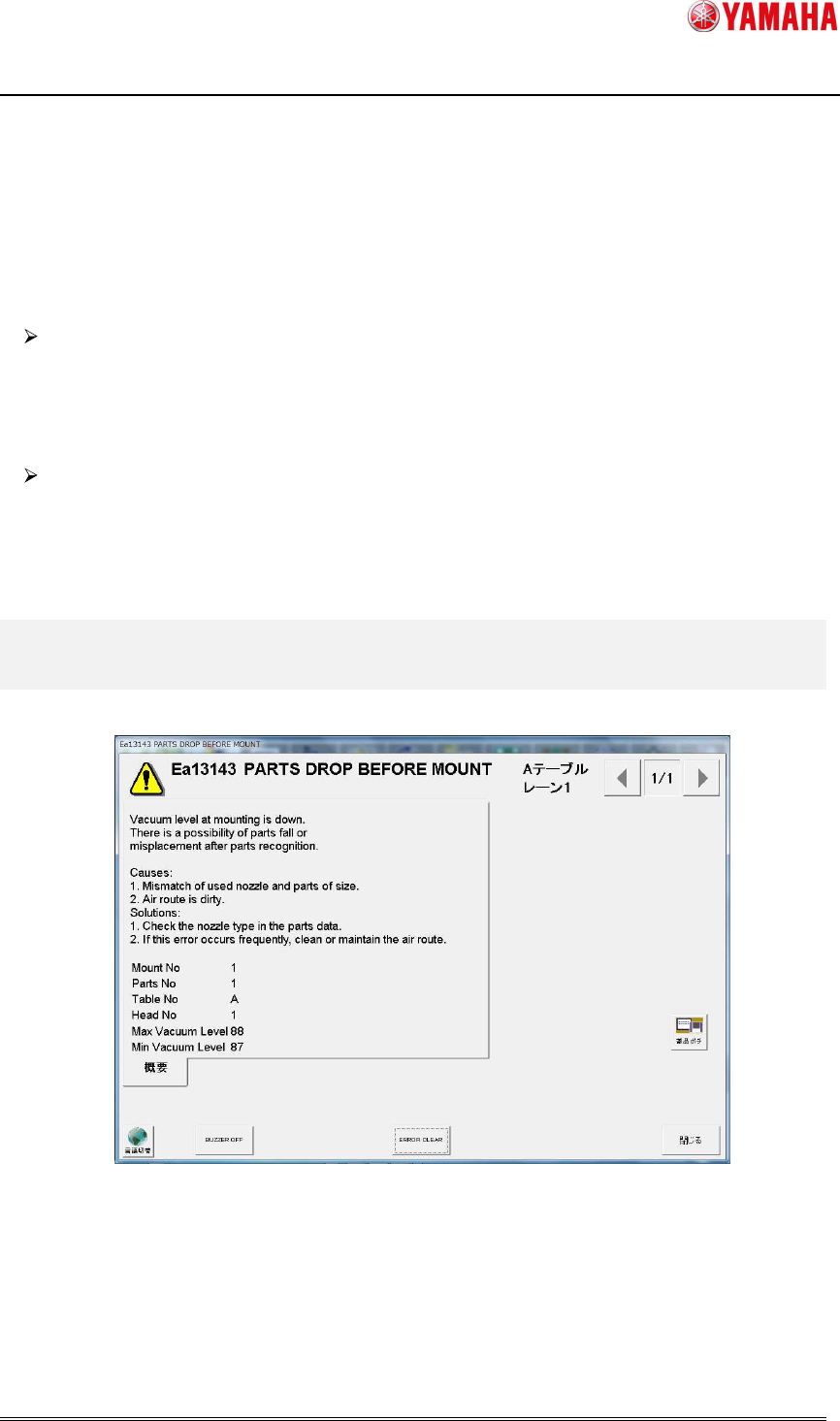
4. Error Message
When parts fall is detected, the following error message is displayed.
Fig 4.1 Error message dialog
When parts fall is detected, the error message is displayed for each head.
By clicking the [Parts Adj] button on the message, you can see the picking condition and
vacuum level of the error head.