SIPLACE HS-60 用户手册.pdf - 第88页
3 技术数据 用户手册 SIPLAC E HS-60 3.8 组件综述 - 贴片头 软件版本 SR.503.xx 2003 年 3 月中文版 88 3.8.2 说明 - 12 段位器收集贴片头采 用收集贴片原理进行工作, 即元件由吸嘴借助真空装置保持, 在完成 一个完整的拾取循环后,通过 吹气压力,平衡而精确地贴装到 PCB 上。检 查吸嘴中的真空情 况若干次,以确定元件是否正 确拾取和放置。 - 放置元件时 z 轴 " 适应…
用户手册 SIPLACE HS-60 3 技术数据
软件版本 SR.503.xx 2003 年 3 月中文版 3.8 组件综述 - 贴片头
87
3.8 组件综述 - 贴片头
3.8.1 带有标准元件视像照相机的 12 段位器收集贴片头
3.8.1.1 结构
3
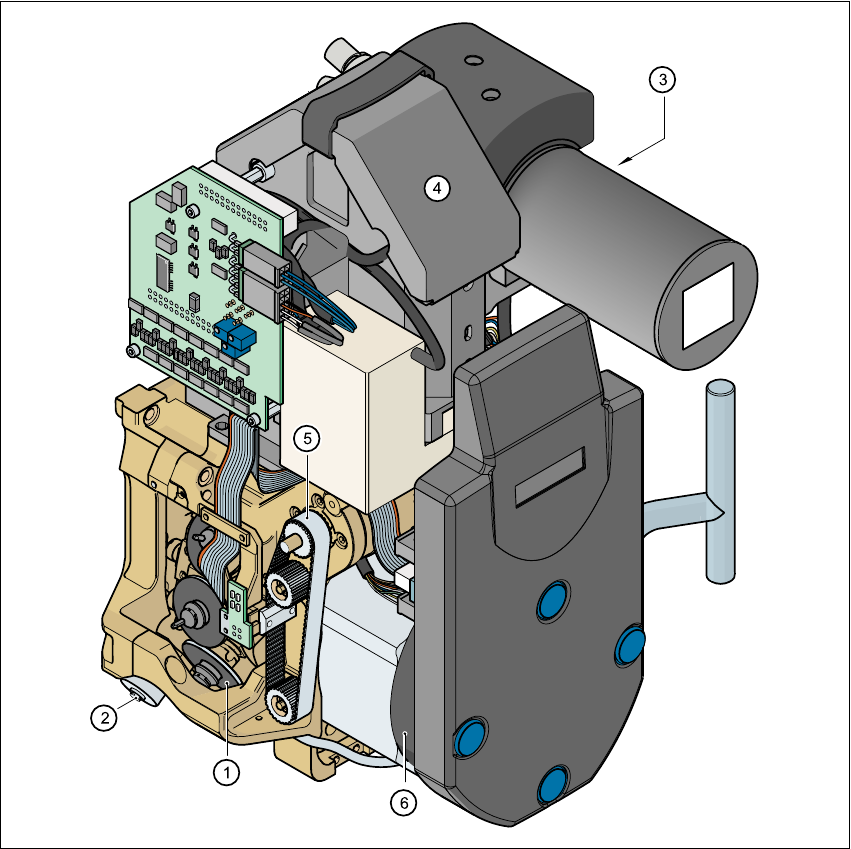
图
3.8 - 1 12
段位器收集贴片头的结构
(1) 带有 12 个段位器光栅盘的星形轴 (2) 抛料马达
(3) DP 马达 (4) 元件视像组件
(5) Z 轴驱动装置 (6) 星形轴马达
3 技术数据 用户手册 SIPLACE HS-60
3.8 组件综述 - 贴片头 软件版本 SR.503.xx 2003 年 3 月中文版
88
3.8.2 说明
- 12 段位器收集贴片头采用收集贴片原理进行工作,即元件由吸嘴借助真空装置保持,在完成
一个完整的拾取循环后,通过吹气压力,平衡而精确地贴装到 PCB 上。检查吸嘴中的真空情
况若干次,以确定元件是否正确拾取和放置。
- 放置元件时 z 轴 " 适应型 " 传感器停止模式可以适应任何不规则 PCB 表面
- 所有的元件以相同的循环时间插入。在插入元件之前,由光电视像组件对其进行测量。
- 元件视像组件不但创建当前元件的图像,
- 也可确定元件的精确位置。
- 比较当前元件的封装形式与已编程的封装形式,以便识别元件。所有不能识别的元件都要抛
弃。
- DP 马达将元件转到所需的贴片位置。
- 抛弃有缺陷的元件,然后在修理过程中再次拾取元件。
3.8.3 技术数据
3
元件范围 0201 至 PLCC44 ,包括 BGA, µBGA,倒装片,
TSOP, QFP PLCC, SO 至 SO32, DRAM
元件规格
最大高度
最小管脚间距
最小突出管脚间距
最小球面管脚 / 突出管脚直径
最小尺寸
最大尺寸
最大重量
6 mm
0.5 mm
0.35 mm
0.2 mm
0.6 mm x 0.3 mm
18.7 mm x 18.7 mm
2 g
Z 轴的最大行程
16 mm
可编程贴片力 2.4 至 5.0 N
吸嘴类型
9 xx
最大贴片速率 15,000 个元件 / 小时
角度精确度
± 0.7° / 4 sigma
带有标准视像组件的贴片准确度
± 80 µm / 4 sigma
用户手册 SIPLACE HS-60 3 技术数据
软件版本 SR.503.xx 2003 年 3 月中文版 3.9 组件综述 - 视像组件
89
3.9 组件综述 - 视像组件
每个贴片系统有 3
- 贴片头上的四个元件视像组件和
- X 轴悬臂下侧上的四个 PCB 视像组件。
视像分析装置位于贴片系统的控制装置中。元件视像组件用于确定: 3
- 元件在吸嘴处的精确位置和
- 元件封装形式的几何形状。
PCB 视像组件使用 PCB 上的基准点确定: 3
- PCB 的位置,
- PCB 的旋转角和
- PCB 的偏移。
PCB 视像组件也可使用供料器组件上的基准点确定元件精确的拾取位置。这对较小的元件来说非
常重要。 3