1OM-1602-004_w.pdf - 第148页
1OM-1602 3-29 第三章 2. 机种切换 (7) 打开透明盖。 注意 马达等负载电源处于 OFF 状态,但由于双手伸进装置内进行 调整作业,因此请充分注意安全。 (8) 用手指轻压线路板,确认支撑销位置是否有问题。 (9) 关闭透明盖。 (10) 按机盖锁定开关,打开开关灯。 1201-003
1OM-1602
3-28
第三章 2. 机种切换
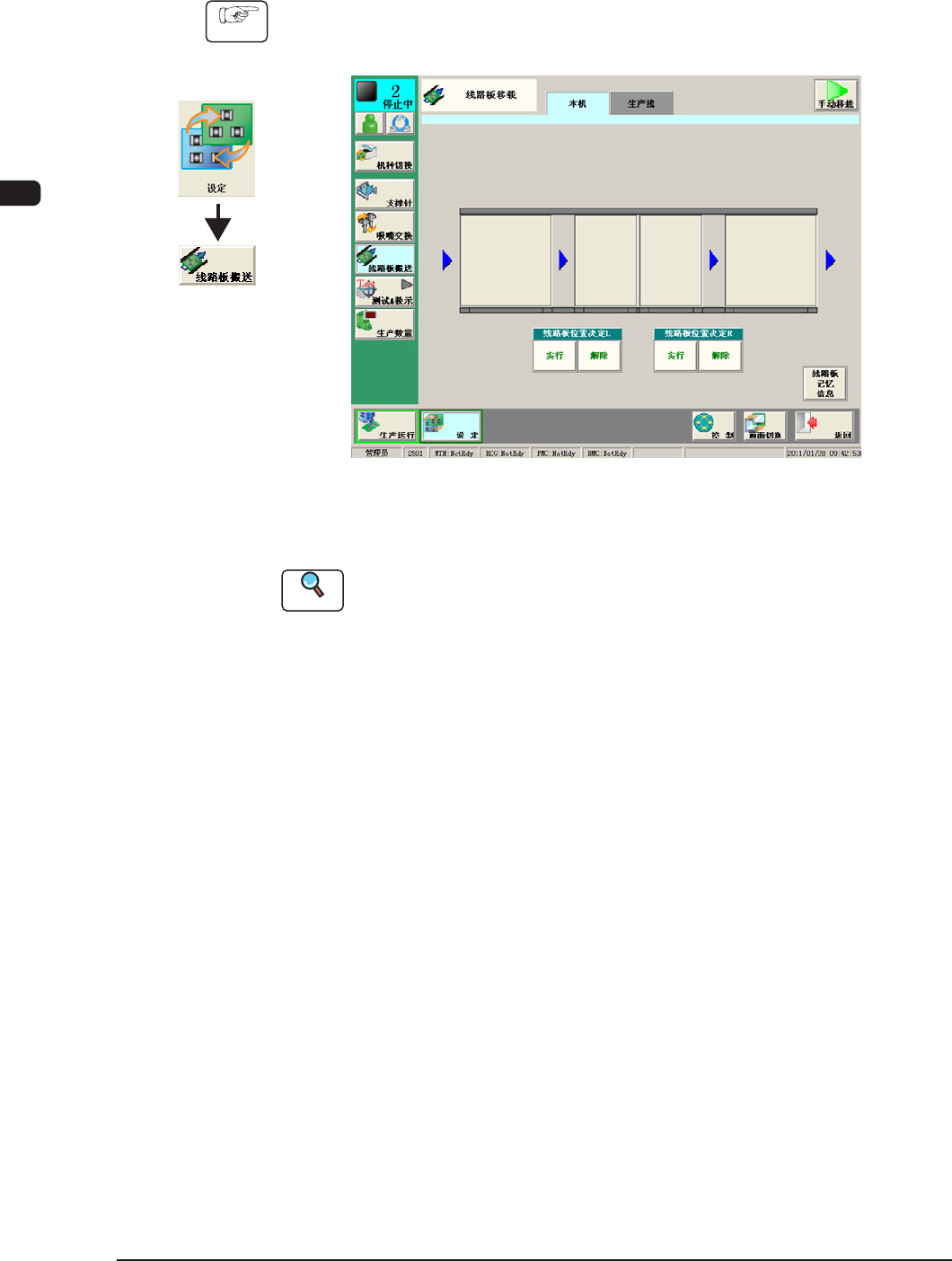
2.3.5 线路板搬运和位置定位状态的确认
在
“
设定
”
菜单的
“
线路板搬送
”
界面中确认线路板搬运和位置定位状态。
Procedure
(1) 随着
“
界面展开
”
,显示
“
线路板移载
”
界面。
F1C27
(2) 从前工序搬入线路板。
Reference
手动搬运线路板时,请参照
“
第三章 4.1.1 手动贴装线路板的步骤
”
章节。
(3) 按下图像显示的定位传送带 L 的模块按钮,在 10 秒钟内按操作台的
[START] 按钮,搬运线路板。
(4) 确认线路板是否正常传送和传送时有无碰撞或掉落。
(5)
按
“
线路板位置决定 L
”
的 [ 实行 ] 按钮,在 10 秒钟内按操作台的
[START] 按钮。
( 支撑台上升。)
(6) 按机盖锁定开关,关闭开关灯。
( 透明盖锁定被解除。)
1201-004
界面展开

1OM-1602
3-29
第三章 2. 机种切换
(7) 打开透明盖。
注意
马达等负载电源处于 OFF 状态,但由于双手伸进装置内进行
调整作业,因此请充分注意安全。
(8) 用手指轻压线路板,确认支撑销位置是否有问题。
(9)
关闭透明盖。
(10) 按机盖锁定开关,打开开关灯。
1201-003
1OM-1602
3-30
第三章 2. 机种切换
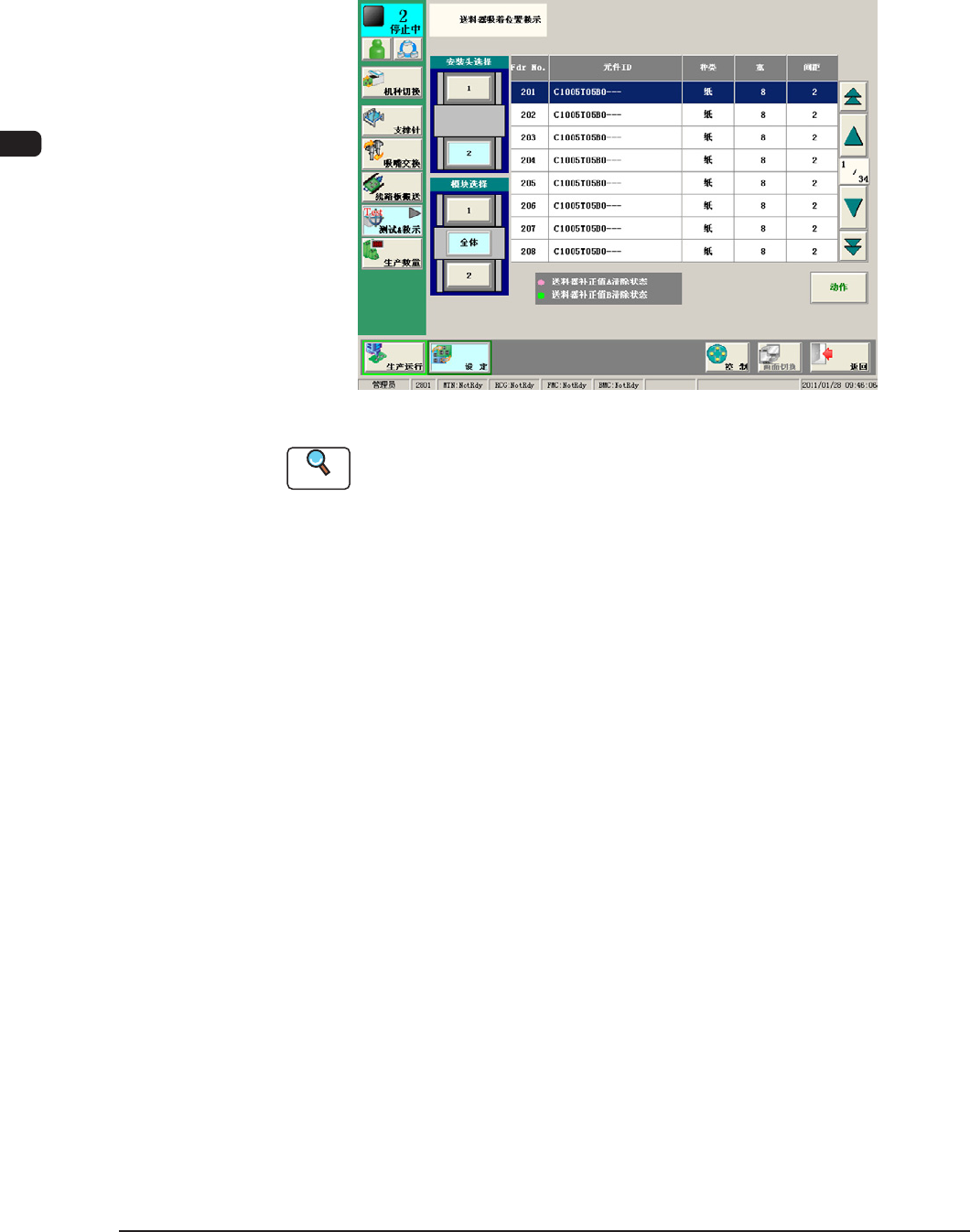
2.3.6 元件吸取位置的确认
通常少许的吸取位置偏离被自动跟踪,因此不需要吸取位置的确认,但是吸
取位置不能顺利进行精密元件等初次的元件吸取时,进行
“
送料器吸取位置
教示
”
。
F1C28
Reference
详细内容请参照
“
第二卷 第六章 7.1 吸取位置教示
”
章节。
1201-004