00191384-01.pdf - 第34页
1 Introducción, Datos Técnicos Instrucciones de uso SIPLACE HS -50 1.13 Vista general de grupos constructivos - Cabezal revólver Versión de software SR.501.xx Edición 01/99 CE-SPA 32 1.13 V ist a gene ral de grupos const…
Instrucciones de uso SIPLACE HS-50 1 Introducción, Datos Técnicos
Versión de software SR.501.xx Edición 01/99 CE-SPA 1.12 Vista general de grupos constructivos- Pórticos
31
El eje-y consta esencialmente de los siguientes grupos constructivos principales: 1
– Accionamiento lineal-y con imán permanente (1) y placa adaptadora (2)
– Sistema guía-y
– Sistema de medición-y
1
El eje-y es accionado a través de un motor lineal. La segunda parte del accionamiento consta de
imanes permanentes y está montada en el bastidor de la máquina. La primera parte está atornilla
da al pórtico (placa adaptadora). Un circuito anticolisión limita el recorrido de los pórticos uno res-
pecto del otro. 1
1.12.5 Datos Técnicos del eje-y
Accionamiento Directo, motor lineal
Velocidad máxima 2,5 m/seg.
Recorrido de los pórticos medido desde Pórtico 1 - 688,5 mm
el centro de la máquina: Pórtico 2 - 768,5 mm
Pórtico 3 - 688, 5 mm
Pórtico 4 - 768,5 mm
Sistema de medición de recorrido Escala metálica lineal
Longitud de escala de medición 1530 mm
Resolución 1 µm
1 Introducción, Datos Técnicos Instrucciones de uso SIPLACE HS-50
1.13 Vista general de grupos constructivos - Cabezal revólver Versión de software SR.501.xx Edición 01/99 CE-SPA
32
1.13 Vista general de grupos constructivos - Cabezal
revólver
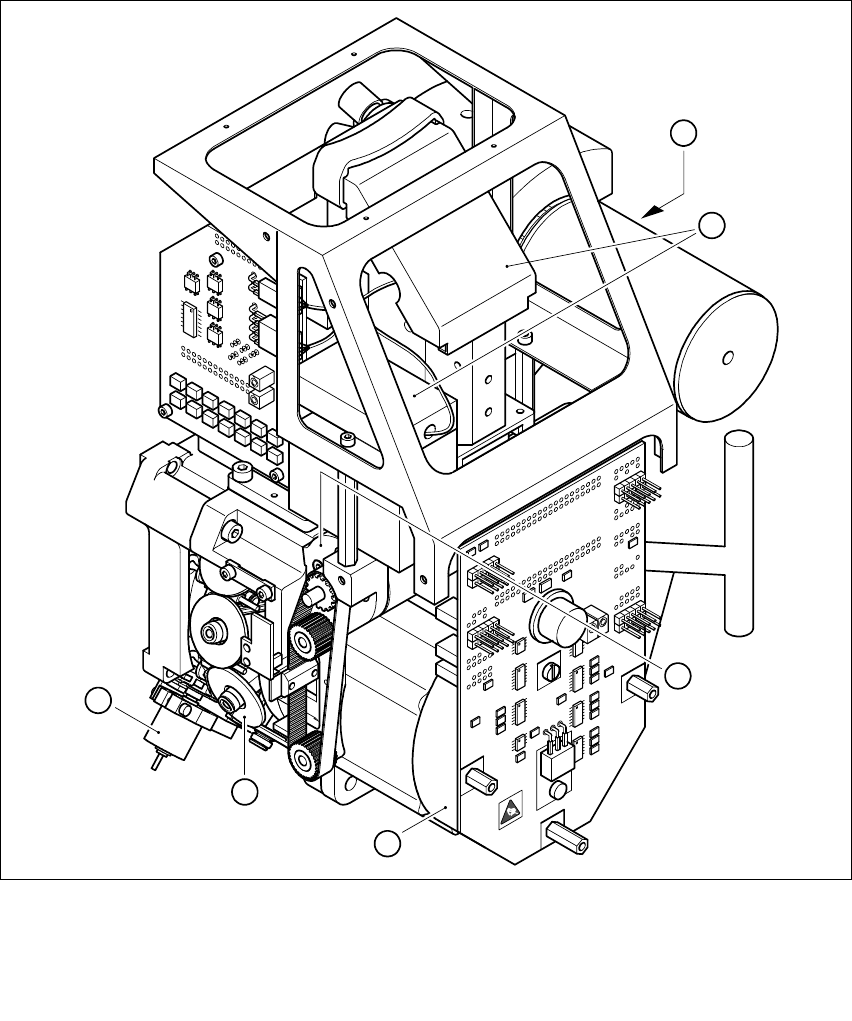
1.13.1 Estructura del cabezal revólver de 12 segmentos
1
Fig. 1.13 - 1 Estructura del cabezal revólver de 12 segmentos
1. Estrella con 12 pinolas 4. Sistema óptico para componentes
2. Motor, accionamiento del regulador de válvula "Descarga" 5. Accionamiento del eje-Z
3. Estación de giro 6. Motor en estrella
6
1
2
5
4
3
Instrucciones de uso SIPLACE HS-50 1 Introducción, Datos Técnicos
Versión de software SR.501.xx Edición 01/99 CE-SPA 1.13 Vista general de grupos constructivos - Cabezal revólver
33
Todos los componentes se dotan con el mismo tiempo de ciclo. Antes de dotar el componente se
mide con el sistema optoelectrónico. 1
– La cámara para componentes genera una imagen del componente tomado.
– Además se determina la posición exacta del componente.
– La forma de la caja del componente tomado se compara con la forma de caja programada para
identificar el componente. Componentes no identificados se expulsan.
– La estación de giro gira el componente a la posición de dotación exigida.
1.13.2 Descripción del cabezal revólver de 12 segmentos
– El cabezal revólver de 12 segmentos funciona según el principio Collect & Place, es decir los
componentes son tomados de las pipetas con ayuda de un vacío y después de un ciclo com-
pleto son colocados de forma suave y en la posición exacta sobre la placa de circuitos impre-
sos con la ayuda de soplado de aire. Al mismo tiempo se controla varias veces el vacío en las
pipetas para determinar si los componentes han sido tomados o colocados de forma correcta.
– El Modo "autodidacta" de parada por sensores del eje-z compensa irregularidades de la placa
de circuitos al depositar los componentes.
– Componentes defectuosos son expulsados y dotados en un ciclo posterior de reparación.
1.13.3 Datos Técnicos - Cabezal revólver de dotar
Gama de componentes
0402 hasta PLCC44, incluido BGA, µBGA, Flip-Chip,
TSOP, QFP, PLCC, SO hasta SO32, DRAM
Altura máx. 6 mm
Trama de patillas mínima 0,5 mm
Dimensiones mín. 0,5 mm x 1,0 mm
Dimensiones máx. 18,7 mm x 18,7 mm
Peso máx. 2 g
Carrera máx. del eje-z 16 mm
Fuerza de montaje programable 2,4 hasta 5,0 N
Tipos de pipetas 7xx
Rendimiento de dotación-Benchmark 12.500 componentes/h
Precisión angular 0,7° para 4 Sigma
Precisión de dotación ± 90 µm para 4 Sigma
± 135 µm para 6 Sigma