00193696-01.pdf - 第88页
8 Neue Funk tionalitäten 504.01 SIPLACE Softwareanleitung SR.504.xx 8.7 Sitest-neue Funktionen Ausgabe 01/03 D E 88 8.7 Si test-neu e Funkt ionen HIN WEI S : Die detaillier te Besch reibung der neuen SI TEST - Funktionen…
SIPLACE Softwareanleitung SR.504.xx 8 Neue Funktionalitäten 504.01
Ausgabe 01/03 DE 8.5 BE-Abwurf
87
Für den Leiterplatten-Barcode Betrieb gelten weiterführend folgende Abläufe/Bedingungen: 8
– Jede Leiterplatte ist mit einem Barcode versehen.
– Die Barcodes werden beim Einfahren der Leiterplatte gelesen.
– Beide Barcodes werden dem Programmiersystem übermittelt, welches dann aus den konfigu-
rierten Losen das Passende aussucht. Der Nutzen dieses Loses wird an die Station übermit-
telt.
– Existiert am Programmiersystem kein Los zu den gelesenen Barcodes, werden die Leiterplat-
ten durchtransportiert.
– Bei fehlenden Leiterplatten-Barcode oder nicht lesbaren Barcode wird an der Station ein
Dialog zur Handeingabe des Barcodes angezeigt.
8.5 BE-Abwurf
Ab der Software-Version 504 ist bei der SIPLACE HF für den 6er- und 12-Revolverkopf ein
neuer Abwurfbehälter vorgesehen. Der RV-Kopf bzw. dessen unteres Segment kann direkt über
diesem Behälter positioniert werden. So wird ein BE-Abwurf in 6-Uhr Position des Sterns ermög-
licht, verbunden mit einer erhöhten Sicherheit beim Abwerfen. 8
Der Behälter wird dabei in der Software-Version 504 als punktförmig betrachtet. 8
In einem Bearbeitungsbereich mit Revolverkopf können maximal zwei Abwurfbehälter vorhanden
sein, je einer pro Stellplatzseite. Falls während des Bestückens ein BE abgeworfen werden muss,
so soll der nächstgelegene Behälter angefahren werden. 8
Wenn statt eines Tisches ein MTC gestellt wird, so ist der entsprechende Abwurfbehälter des
Stellplatzes verdeckt und kann somit nicht verwendet werden. Ebenso ist ein zusätzlicher Behäl-
ter verfügbar, wenn statt eines MTC ein Tisch gestellt wird. Dies wird von der Software erkannt
und berücksichtigt. 8
8.6 Neue IC- und FC-Kamera
Für die Siplace HF sind mit der Softwareversion 504 zwei stationäre Kamerasystem verfügbar.
Die stationäre IC-Kamera (SST22) mit einem Gesichtfeld von 45 x 55 mm² ist für Bauteilgrößen
bis zu 40 x 50 mm² bei einer Einfachmessung ausgelegt. Die optionale stationäre FC-Kamera
(SST20) mit einem Gesichtsfeld von 11 x 11 mm² ist für eine Bauteilgröße bis zu 8 x 8 mm² bei
einer Einfachmessung ausgelegt. Mit beiden Kameras kann eine Mehrfachmessung durchgeführt
werden. 8
Die Kalibrierung und Konfiguration der Kameras erfolgt über den SITEST. 8
8 Neue Funktionalitäten 504.01 SIPLACE Softwareanleitung SR.504.xx
8.7 Sitest-neue Funktionen Ausgabe 01/03 DE
88
8.7 Sitest-neue Funktionen
HINWEIS:
Die detaillierte Beschreibung der neuen SITEST-Funktionen entnehmen Sie bitte der „Software-
anleitung SITEST 504“ sowie der Online-Hilfe für den SITEST. 8
Folgende Anpassungen wurden für die Sotwareversion 504 vorgenommen: 8
– Abhängig von der Maschinenkonfiguration kann man für RV-, IC- und FC-Kameras das Lifebild
ein- und ausschalten.
– Firmwaredownload: Neue Subsysteme sind Twin Head (Seg1, Seg2), Twin Head Z- und Dp-
Achse (Seg1, Seg2), EA-Module, LP-RV-Kamera, IC-FC-Kamera.
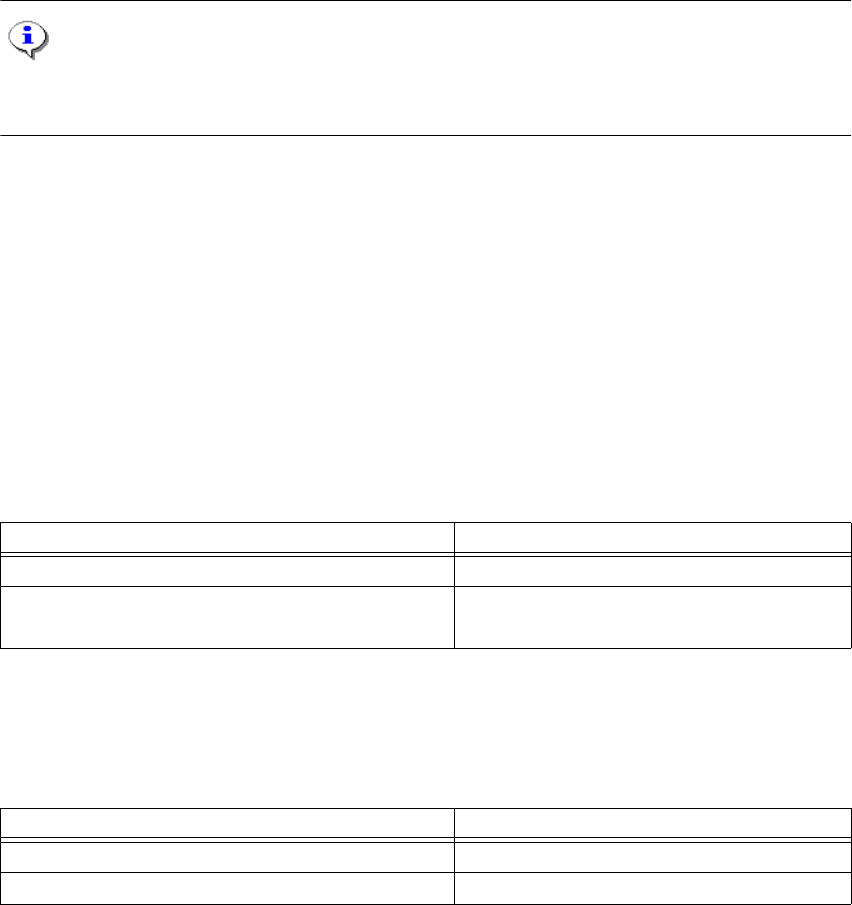
– Maschinenkonfiguration: Es kann auf Portal 1 ein 12er-Kopf, ein 6er-Kopf oder ein Twinhead
konfiguriert werden. Zu jedem Kopftyp können folgende Kameras und Pipettenwechsler kon-
figuriert werden:
12er-Kopf 8
8
6er-Kopf 8
8
8
BE-Kamera 1 8 Pipettenwechsler 8
RV-Kamera (Typ 12) FOV
a
24 x 24 8 RV12 Standard 8
RV-Kamera (Typ 14) FOV 15,5 x 15,6 DCA
b
8 RV12 2-reihig
RV12 3-reihig 8
a. FOV= field of view (MFOV-Messung): Mehrere Ausschnitte werden aufgenommen
(Ausschnitt ist ein FOV) und zu einem Ganzen zusammengesetzt.
b. DCA = direct chip access.
BE-Kamera 1 8 Pipettenwechsler 8
RV-Kamera (Typ 13) FOV 39 x 39 8 RV12 Standard 8
RV-Kamera (Typ 14) FOV 15,5 x 15,6 DCA 8 RV12 2-reihig 8
SIPLACE Softwareanleitung SR.504.xx 8 Neue Funktionalitäten 504.01
Ausgabe 01/03 DE 8.7 Sitest-neue Funktionen
89
Twinhead 8
8
– Köpfe und Kameras kalibrieren: Im Dialog „Alle Köpfe alle Kameras“ können pro Bestückbe-
reich die Kalibrierfunktionen ausgewählt werden.
– Köpfe und Mapping: Im Dialog „Köpfe und Mapping“ kann jetzt die Mappingbreite für die neue
oder die alte Mappingplatte gewählt werden (Abschnitt 8.7.1).
– Transportwangen. Es werden die Korrekturwerte für die Breitenverstellung des Transports er-
mittelt.
– Portal teachen: Maschinenpositionen mit der LP-Kamera anfahren.
– Portaldauerlauf: Es wird gleichzeitig mit X- und Y-Achse ein Dauerlauf durchgeführt.
– Portal – Achsfunktionen: Es wird für die gewählte Achse der Verfahrbereich automatisch ermit-
telt und dann die Endschalterpositionen und der min. und max. Verfahrbereich angezeigt und
in die Achse übernommen.
– RV-Kopf teachen: Maschinenpositionen mit der Pinole des RV-Kopfes anfahren.
– RV-Kopf – RV-Kopf und -Kamera: Es wird der Kopfoffset kalibriert (LP-RV-Kameraabstand).
– RV-Kamera kalibrieren: Es wird die RV-Kamera kalibriert.
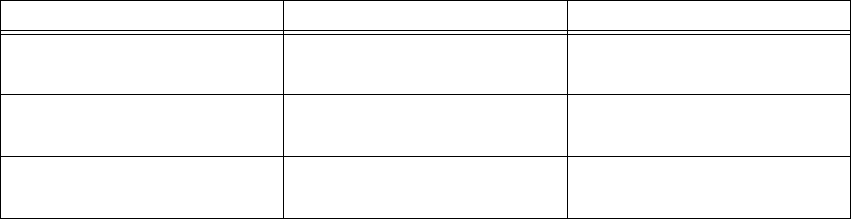
– Twinhead:
– Funktionen zur Unterstützung des Twinhead
– Achsfunktionen zur Unterstützung des Twinhead
– Kopfplatine zur Unterstützung des Twinhead
–IC-Kamera, FC-Kamera
– Kalibrieren
– TH Mapping
– Pipettenwechsler Kopffunktionen, Magazinfunktionen
– Transportbandbreite
– Transport – Funktionen
BE-Kamera 1 8 BE-Kamera 2 8 Pipettenwechsler 8
IC-Kamera (Typ 7) FOV
38 x 38 3 Ebenen 8
FC-Kamera (Typ 11) FOV
9,2 x 11,4 8
Twinhead 3 / 1 8
IC-Kamera (Typ 10) FOV
38 x 38 4 Ebenen 8
FC-Kamera (Typ 20) FOV
11 x 11 8
Twinhead 5 / 2 8
IC-Kamera (Typ 22) FOV
45 x 60 8
FC-Kamera (Typ 21) FOV
21 x 21 8
Twinhead 8 / 4 8