00191024-01.pdf - 第216页
7 Vi sions yst eme Betriebsanleitung SIPLACE 80 S/F/G 7.3 BE-Visionsystem Ausgabe 07/97 ab Softwareversion SR.010.xx 7 - 24 Einric hter L ageerkennungssystem fü r den IC-Kopf für Flip-Chips Kamera-Typ: SONY X C75C Anz ah…

Betriebsanleitung SIPLACE 80 S/F/G 7 Visionsysteme
Ausgabe 07/97 ab Softwareversion SR.010.xx 7.3 BE-Visionsystem
Einrichter 7 - 23
BE-Lageerkennungssystem des Revolverbestückkopfs
Das optische System zur BE-Lageerkennung des Revolverbestückkopfs ist in Abschnitt 7.3.1 bereits
beschrieben.
BE-Lageerkennungssystem für den IC-Kopf mit IC-Sensor
Alle optischen Komponenten des Systems
–
CCD-Kamera (SONY-Kamera XC77)
–
Objektiv
–
Optisches Bandfilter zur Unterdrückung von Störreflexionen
sind in einem staubdichten Gehäuse untergebracht. Das Gesichtsfeld der CCD-Kamera beträgt 38 mm x
38 mm. Zur Lageerkennung bzw. zum Beinchentest wird der IC-Baustein im Auflichtverfahren von drei LED-
Ebenen ausgeleuchtet und mit dem Objektiv auf den CCD-Chip scharf abgebildet. Mit Methoden der digitalen
Bildverarbeitung werden die Parameter für Lage, Verdrehwinkel und Beinchenzustand von Fine-pitch-Bauele-
menten und BGAs (Ball Grid Arrays) ermittelt.
BE-Lageerkennungssystem für den IC-Kopf mit FC-Sensor
Alle optischen Komponenten des Systems wie
–
CCD-Kamera (SONY-Kamera XC75C)
–
Objektiv
sind in einem staubdichten Gehäuse untergebracht. Das Gesichtsfeld der CCD-Kamera beträgt 12,2 mm x
9,2 mm. Zur Lageerkennung bzw. zum "Ball"-Test (Lotkugeltest) werden die Flip-Chips im Auflichtverfahren
von zwei LED-Ebenen ausgeleuchtet und mit dem Objektiv auf dem CCD-Chip scharf abgebildet. Mit Metho-
den der digitalen Bildverarbeitung werden die Parameter für Lage, Verdrehwinkel des Bauelements bzw.
Anzahl und Lage der Balls ermittelt.
Die Visionauswerteeinheit finden Sie in Abschnitt 7.2.1 "Systembeschreibung" beschrieben.
7.3.2.2 Technische Daten
Lageerkennungssystem für den IC-Kopf für Bauelemente mit Beinchenanschlüssen
Kamera-Typ: SONY XC77
Anzahl der Pixel: Kamera 768 (H) x 494 (V)
Bild 640 (H) x 484 (V)
Gesichtsfeld: 38 mm x 38 mm
Beleuchtungsmethode: Auflichtverfahren (Rotlicht)
3 Beleuchtungsebenen
Bildverarbeitung: HALE - Grauwertverfahren (High Accuracy Lead Extraction)
ca. 140 msec bei kleinen Bauelementen
Bildschirm: RGB - Monitor (VGA-Modus) 640 x 484 Pixel
Spektrum der erkennbaren Bauelemente: Fine-pitch bis 55 mm x 55 mm und BGAs (Ball Grid Arrays)
Minimaler Beinchenabstand: 0,4 mm
Anzahl der Gehäuseformen:
≤
2047

7 Visionsysteme Betriebsanleitung SIPLACE 80 S/F/G
7.3 BE-Visionsystem Ausgabe 07/97 ab Softwareversion SR.010.xx
7 - 24 Einrichter
L
ageerkennungssystem für den IC-Kopf für Flip-Chips
Kamera-Typ: SONY XC75C
Anzahl der Pixel: Kamera 768 (H) x 494 (V)
Bild 640 (H) x 484 (V)
Gesichtsfeld: 12,2 mm x 9,2 mm
Beleuchtungsmethode: Auflichtverfahren (Rotlicht)
2 Beleuchtungsebenen
Bildverarbeitung: ca. 1 sec bei Standard-Flip-Chips
Bildschirm: RGB - Monitor (VGA-Modus) 640 x 484 Pixel
Spektrum der erkennbaren Bauelemente: Flip-Chips und Fine-pitch BEs bis ca. 15 mm x 15 mm
Minimale "Ball"-Größe: 80 µm
Minimale Teilung 0,2 mm
Anzahl der Gehäuseformen:
≤
2047
7.3.2.3 Funktionsbeschreibung
Bauelemente werden am Revolverbestückkopf optisch zentriert, wie dies im Abschnitt 7.3.1.3 "Funktionsbe-
schreibung" für den
80S-Automaten beschrieben ist. Für den IC-Kopf stehen zur optischen Zentrierung von Bauelementen zwei
optische Zentriersysteme zur Verfügung:
–
der IC-Sensor für Fine-pitch-Bauelemente bis zu einer Größe von 55 mm x 55 mm und einer minimalen
Teilung von 0,4 mm und BGAs (Ball-Grid-Arrays)
–
der FC-Sensor für Flip-Chips und Fine-pitch-Bauelemente bis zu einer Größe von 15 mm x 15 mm und
einer minimalen Teilung von 0,2 mm
Der IC-Kopf holt die Bauelemente von Flächenmagazinen ab und positioniert sie über das jeweilige optische
Zentriersystem. Räumlich versetzte LED-Ebenen leuchten das Bauelement mit Rotlicht gleichmäßig aus. Die
von der Bauelementekamera erzeugte digitale Bauelementeabbildung wird in die Visionauswerteeinheit über-
tragen. Hier erfolgt eine Auswertung entsprechend dem Bauelementetyp. Die daraus gewonnen Ergebnisse
liefern Aussagen zu Positionsabweichungen, Verdrehwinkel, Beinchenzustand und der Abbildungsqualität
des Bauelements.
Für BGAs und Flip-Chips wurden neue Beleuchtungsverfahren und spezielle Algorithmen zum Gewinnen der
Bauelementeparameter entwickelt, um diese neue Generation von Bauelementen optisch zentrieren zu kön-
nen.
Bauelemente, die sich nicht optisch zentrieren lassen, legt der IC-Kopf zur weiteren Analyse wieder in das
Flächenmagazin zurück.
Betriebsanleitung SIPLACE 80 S/F/G 7 Visionsysteme
Ausgabe 07/97 ab Softwareversion SR.010.xx 7.3 BE-Visionsystem
Einrichter 7 - 25
7.3.3 Kriterien zur Erfassung von Bauelementen
●
Form der Bauelemente
Mit der optischen Bauelementezentrierung können neben regelmäßigen auch unregelmäßige Bauele-
mente zentriert werden. Als maximale Beinchenanzahl sind für die horizontale bzw. vertikale Richtung
jeweils 99 Beinchen zugelassen.
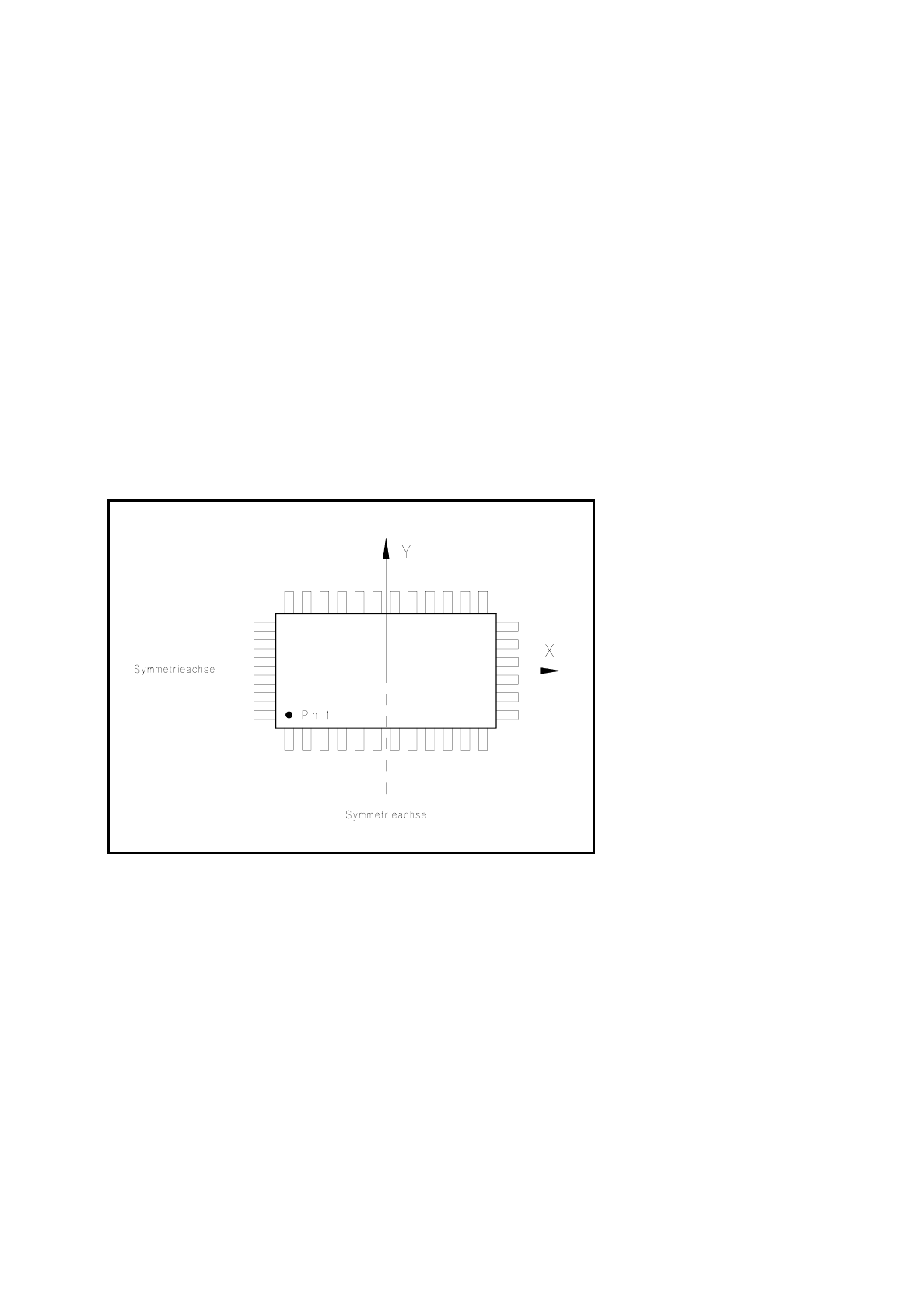
Kriterien für regelmäßige Bauelemente
Definition
Ein Bauelement wird als regelmäßig bezeichnet, wenn folgende vier Bedingungen erfüllt sind:
–
rechteckige Gehäuseform (Sonderfall: quadratische Form)
–
nur ein Beinmodell (lead-type) pro Seite
–
nur eine Beingruppe pro Seite
–
Die gegenüberliegende Beingruppen sind jeweils symmetrisch zu den beiden Hauptachsen
(x-, y-Achse).
Abb. 7.3.1 Regelmäßiges Bauelement
Kriterien für unregelmäßige Bauelemente
Definition
Ein Bauelement wird als unregelmäßig bezeichnet, wenn es nicht die Bedingungen für regelmäßige Bau-
elemente erfüllt.
Zusätzliche Bedingungen für die Zentrierung mit dem BE-Visionsystem:
–
In einer Reihe sind bis zu 3 verschiedene Beinmodelle erlaubt.
–
In einer Reihe sind bis zu 15 Gruppen zulässig.