YSP20_Users_K.pdf - 第62页
1-21 1 █ 테 이블 축 구성 스퀴지 스퀴지 헤드 마스크 마스크 SRA축 SYA축 SZA축 플러스 방향 마이너스 방향 MYA2축 MYA1축 MZA축 스퀴지 스퀴지 헤드 SRB축 SYB축 SZB축 MYB2축 MYB1축 MZB축 ■ 테이블 A ■ 테이블 B RL(우→좌 흐름)의 장비 정면에서 본 예 6 7119 - N 3 - 0 0 유니 트명 축 기능 스퀴 지 헤드 SY 스퀴 지 헤드 를 Y…
1-20
1
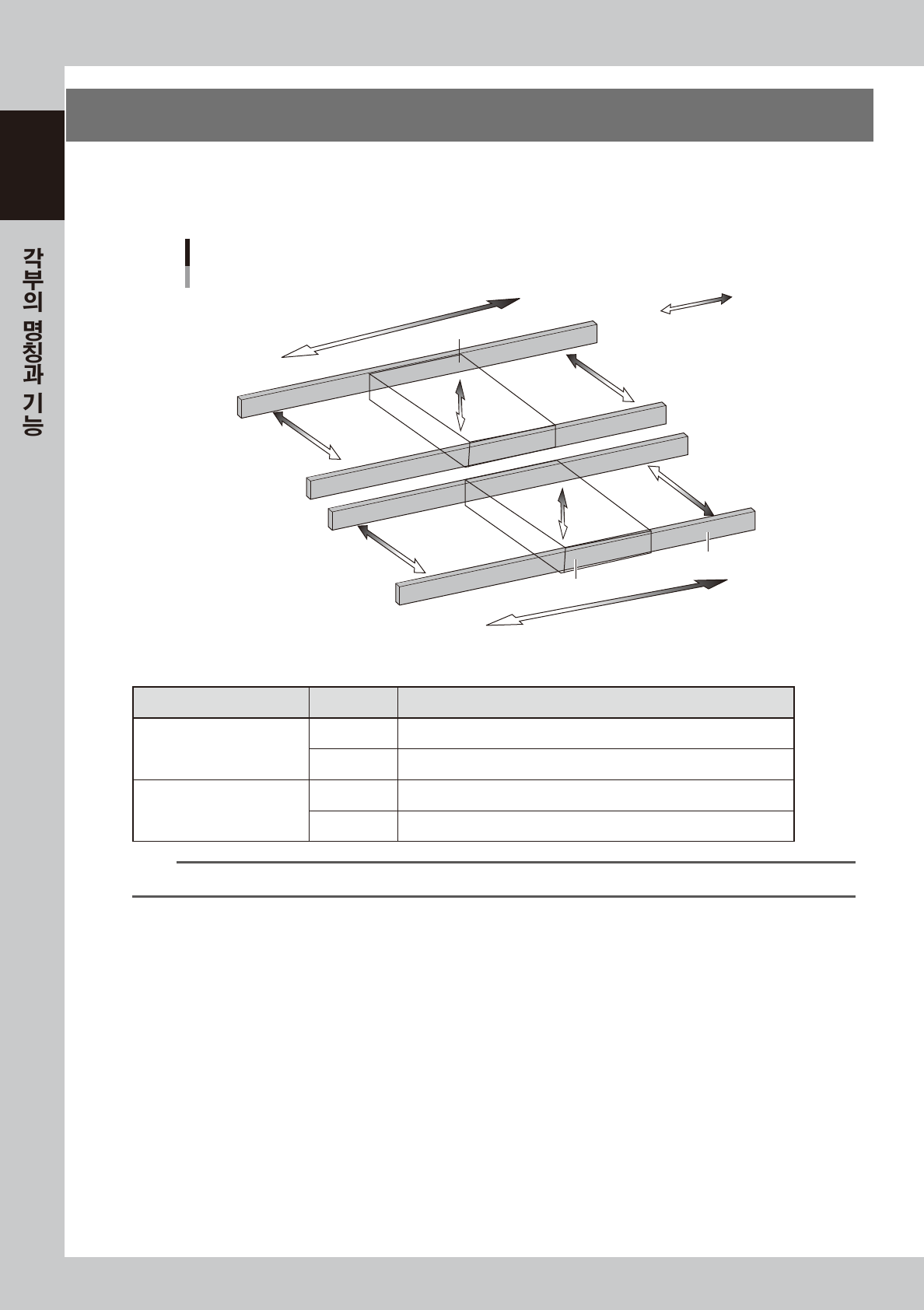
7. 서보제어 축 구성
YSP20 는 , 다음과 같이 서보제어 축으로 구성되어 있습니다 . 다른 작동 기구들은 에어구동으로 됩니다 .
█
듀얼 레인
플러스 방향
마이너스 방향
W2축
축 구성
레인 1
레인 2
W1축
Y1축
Y2축
PU1축
PU2축
X2축
X1축
컨베이어 레일
기판 고정부(고정 유니트)
기판 고정부(고정 유니트)
67118-N3- 00
█ 제어 축의 명칭과 기능
유니트명 축 기능
기판 고정부
( 고정 유니트 )
X1, X2 축 고정 유닛을 X 축 방향에 따라서 이동시킵니다 .
PU1, PU2 축 푸쉬업 플레이트를 상하로 동작시킵니다 .
기판 반송부
Y1, Y2 축 컨베이어 유닛을 Y 축 방항에 따라서 이동시킵니다 .
W1, W2 축 반송 컨베이어 폭을 가변합니다 .
참고
조작 화면상에서 각 축을 수동으로 조작할 수 있습니다. 상세한 내용은. 제 7 장「4.1「축 이동」화면」을 참조해 주십시오 .
1-21
1
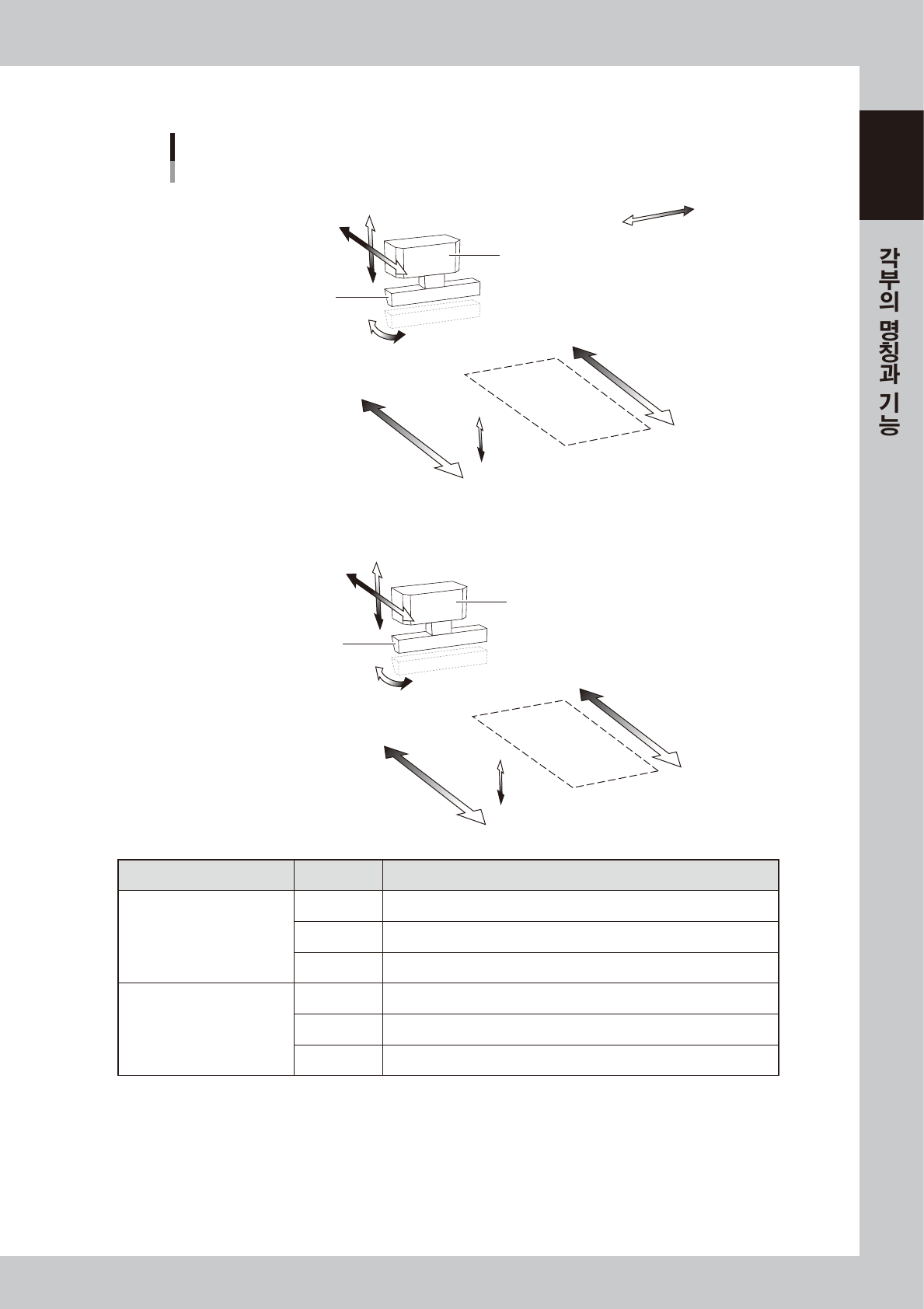
█
테이블
축 구성
스퀴지
스퀴지 헤드
마스크
마스크
SRA축
SYA축
SZA축
플러스 방향
마이너스 방향
MYA2축
MYA1축
MZA축
스퀴지
스퀴지 헤드
SRB축
SYB축
SZB축
MYB2축
MYB1축
MZB축
■ 테이블 A
■ 테이블 B
RL(우→좌 흐름)의 장비 정면에서 본 예
67119 - N3 - 00
유니트명 축 기능
스퀴지 헤드
SY 스퀴지 헤드를 Y 축과 평행으로 이동시킵니다 .
SZ 스퀴지 헤드를 상하로 이동시킵니다 .
SR 스퀴지 헤드를 회전시킵니다 .(3S 헤드만 )
인쇄 테이블
MY1 마스크를 Y 축 방향으로 이동시킵니다 .
MY2 마스크를 R 방향으로 이동시킵니다 .
MZ 마스크를 Z 축 방향으로 이동시킵니다 .

제 2 장 기본적인 조작
이 장에서는 , 장비의 기동
•
종료방법을 비롯하여 비상정지나 에러의 해제방법 , 조작화면의 구성 등
기본적인 조작에 대해 설명합니다 . 실제로 장비를 조작하면서 본 장의 설명을 읽어 주십시오 .
목차
1. 비상정지의 해제와 에러클리어 2-1
1.1 비상정지의 해제방법 2-1
1.2 에러의 클리어방법 2-2
1.3 대표적인 에러와 대처방법 2-3
2. 장비의 기동과 종료 2-9
2.1 시작전 점검을 한다 2-10
2.2 장비를 기동한다 2-11
2.3 장비의 전원을 OFF 로 한다 2-13
3. 조작화면의 설명 2-15
3.1 조작화면의 기본구성 2-15
3.2 각종버튼과 입력박스 2-16