識別代碼.pdf - 第61页
HGR14 附录 1.3 按形 状输入数据项 目 附录 1-61 形状编号 对象形状 参考编号 对象部品 (类别) 对应 Ver. 6a 特殊用途 1 125: 自动设定 指示灯值 126: 手动设定 指示灯值 基板识别 标记 实装点识 别标记 等 V7.0 0 以上 形状以及 输入数据 识别方式 以及结果 形状编号 色 尺寸 ( a 、 b 、 c 、 d ) 判断标准 参照下表 (Top vie w) 1) 相关值( = 匹配一致 …
HGR14
附录 1.3 按形状输入数据项目
附录 1-60
形状编号
对象形状
参考编号
对象部品
(类别)
对应
Ver.
5l
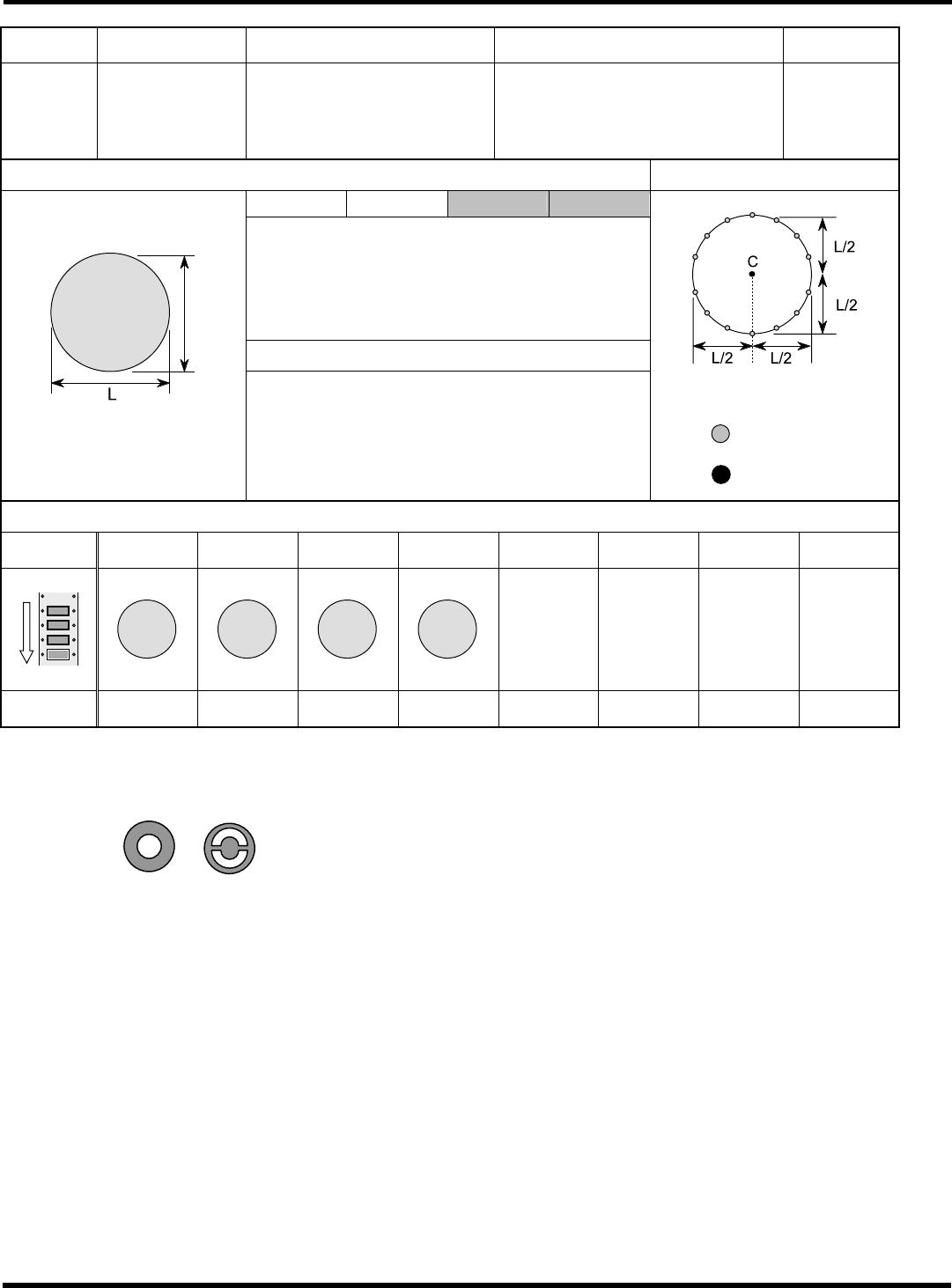
特殊形
12
128
圆盘
焊锡球
等
V7.00
以上
形状以及输入数据
识别方式以及结果
长度
L
宽度
W
判断标准
1)
长度
: L
±
(20%)
等
(Top view)
在圆的周围识别
:
检测位置
:
检测中心
可识别姿势(只可识别以下式样
<
也有一部分例外
>
)
式样编号
0 1 2 3 4 5 6 7
式样
进给方向
式样角度
±
0
°
±
180
°
+
90
°
−
90
°
(备注)
1. 不进行角度检测。
2. 内侧有孔的圆形也可识别。
3. 专用于透过识别。
(备注)
HGR14-C-PMA01-A02-00
HGR14
附录 1.3 按形状输入数据项目
附录 1-61
形状编号
对象形状
参考编号
对象部品
(类别)
对应
Ver.
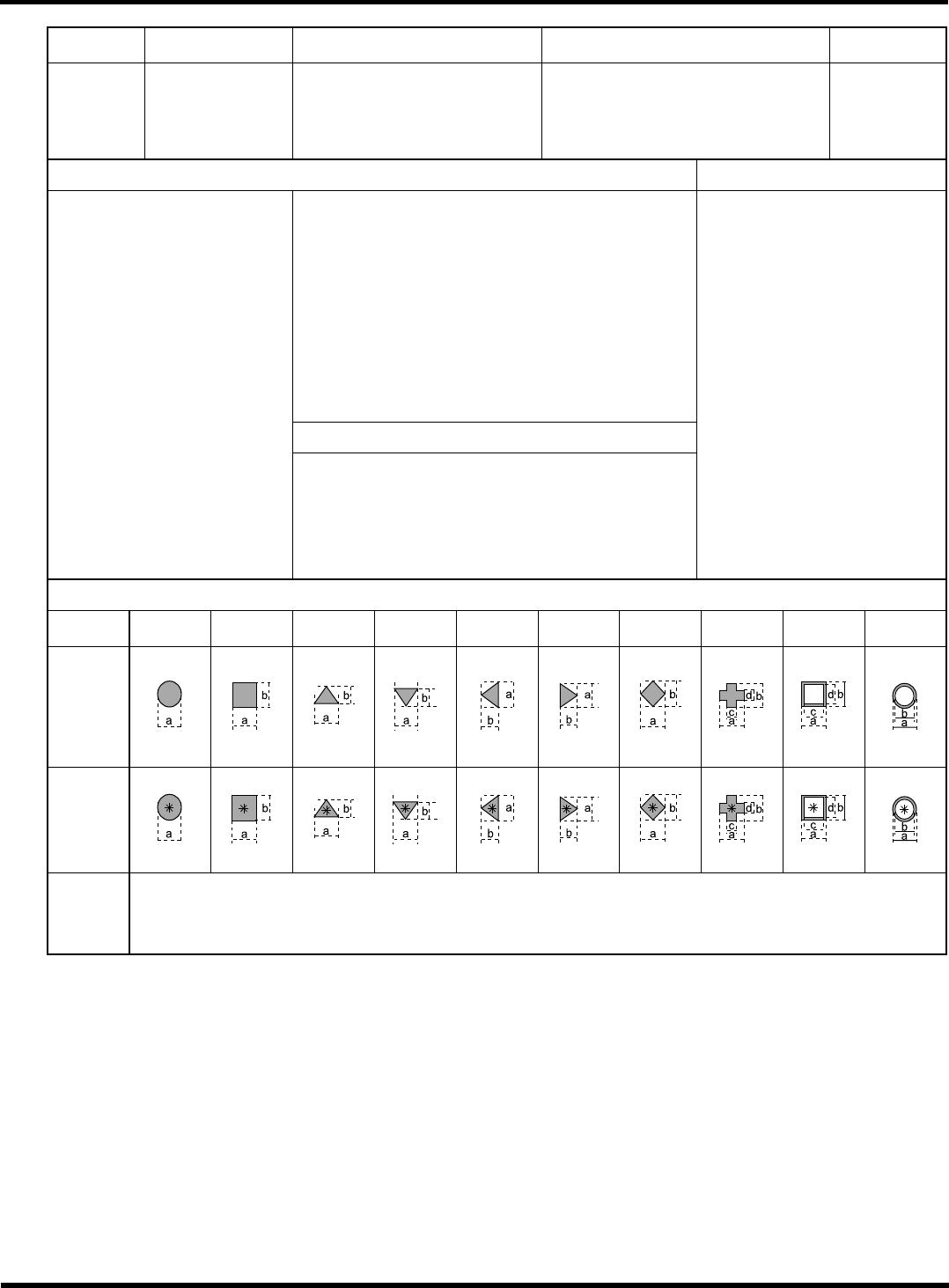
6a
特殊用途
1 125:
自动设定指示灯值
126:
手动设定指示灯值
基板识别标记
实装点识别标记
等
V7.00
以上
形状以及输入数据
识别方式以及结果
形状编号
色
尺寸
(
a
、
b
、
c
、
d
)
判断标准
参照下表
(Top view)
1)
相关值(
=
匹配一致率比输入的临界值大。)
参照下表
XY
坐标
:
中心坐标
ANS:
匹配的相关值
OK
时,归还
100
。
可识别形状(只可识别以下形状
<
也有一部分例外
>
)
形状编号
1 2 3 4 5 6 7 8 9 10
形状
识别结果
(
XY
坐标)
备注
根据各标记
a
、
b
的中心坐标计算出识别结果。(圆形的为中心坐标)
(备注)
1. 依据形状指定进行的基板识别是根据
·形状编号
·颜色
·尺寸
的数据制作目标图像,并通过匹配进行识别。
2. 参考编号为 125 的识别装置自动设定灯值。
不过,出现不良状况时,使用参考编号为 126,设定灯值。
HGR14-C-PMA01-A02-00
HGR14
附录 1.4 轮廓识别错误信息
附录 1-62
1. ·0000
附录
附录附录
附录
1.4
轮廓识别错误信息
轮廓识别错误信息轮廓识别错误信息
轮廓识别错误信息
附录
附录附录
附录
1.4.1
生产中的显示
生产中的显示生产中的显示
生产中的显示
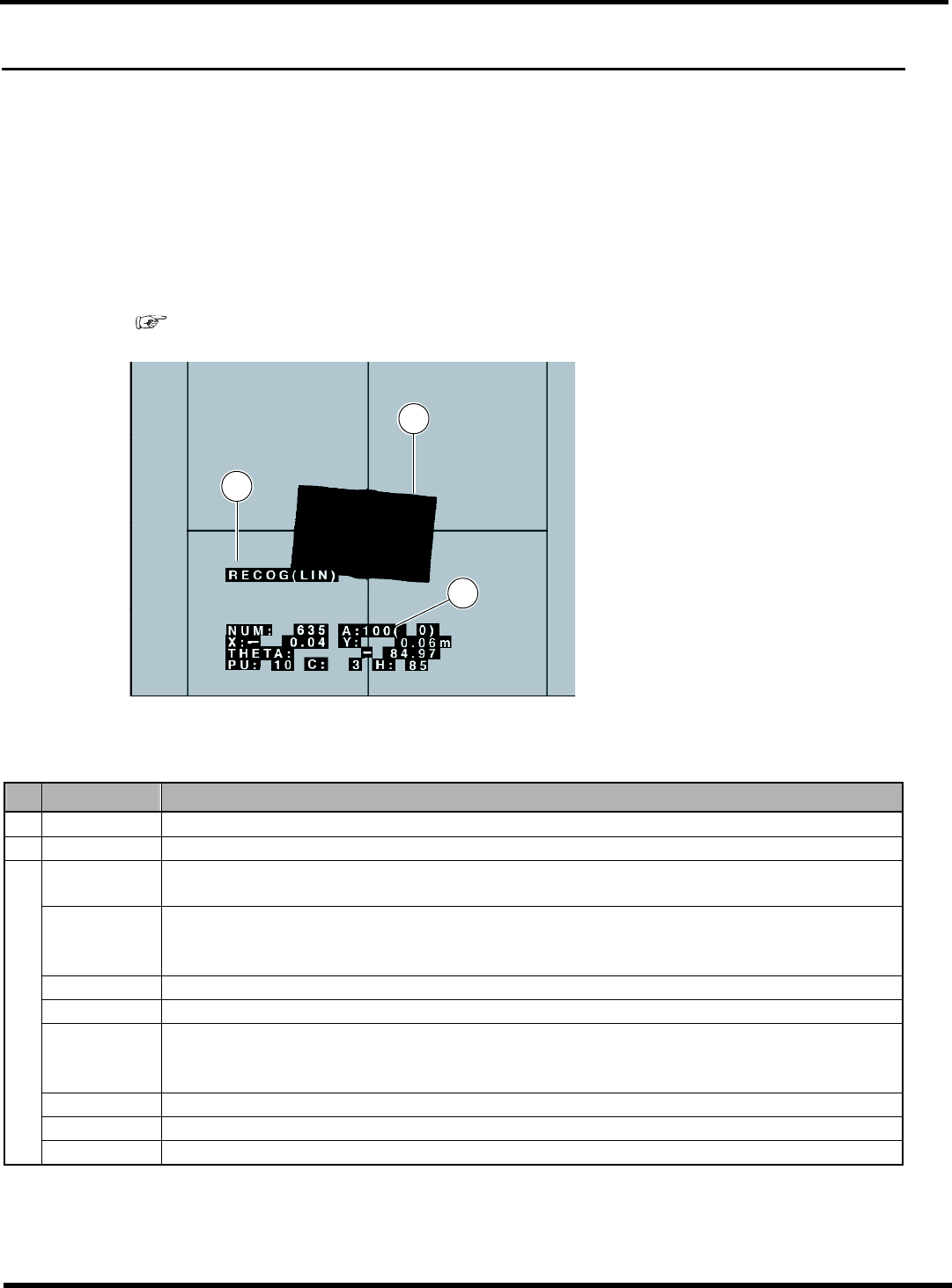
轮廓识别(参考 No.51 以后)时,通过显示在画面上的识别结果代码(A:或者 ANS:),可以知道
识别结果。
识别结果代码 50 以上
:
识别正常结束(显示识别结果坐标、斜度)
上述以外
:
识别错误(不可)
所谓识别错误(不可)是指判定为不可识别或者不良部品的情况。
通过识别结果代码可以确认其内容。
( 附录 1.4.3 识别错误信息一览)
图. 4-1 识别结果画面(运转时)
No.
名称 说明
表示轮廓识别。
识别对象
NUM
轮廓点数
表示识别对象的轮廓象素点数。
A
识别结果代码
显示识别结果。
识别错误时,根据代码编号,能够知道内容。
X
识别结果 X 坐标[mm]
Y
识别结果 Y 坐标[mm]
THETA
识别结果斜度[
°
]
识别正常结束时,显示识别对象的位置(XY 坐标)以及斜度。
识别错误时,全部显示为 0。
PU
装置编号(PU 编号)
C
芯片编号
H
吸头编号
∗
识别结果坐标显示距照相机中心(十字线中心)的距离。(图. 4-2)
HGR14-C-PMA01-A03-01
HGR14-003C
1
2
3