NPM识别培训教材V2.0(2).pdf - 第5页
- 3 - 三 各形状检测方法的简要说明 1) 引线组 对 各引 线 的前端方向/ 宽 度方向的 边 端位置 进 行 检测 和定位。 登 录 的引 线 根数 为 2或2以上 时 ,要 对 各引 线 中心位置 间 的距离( 间 距) 进 行 检查 。 ※引 线间 有不要的模具突起等存在 时 , 请 分 开 登 录 引 线组 。 2 ) 球 组 对 各球的外 围 部的 边 端位置 进 行 检测 和定位。 登 录 的球行列数 …
- 2 -
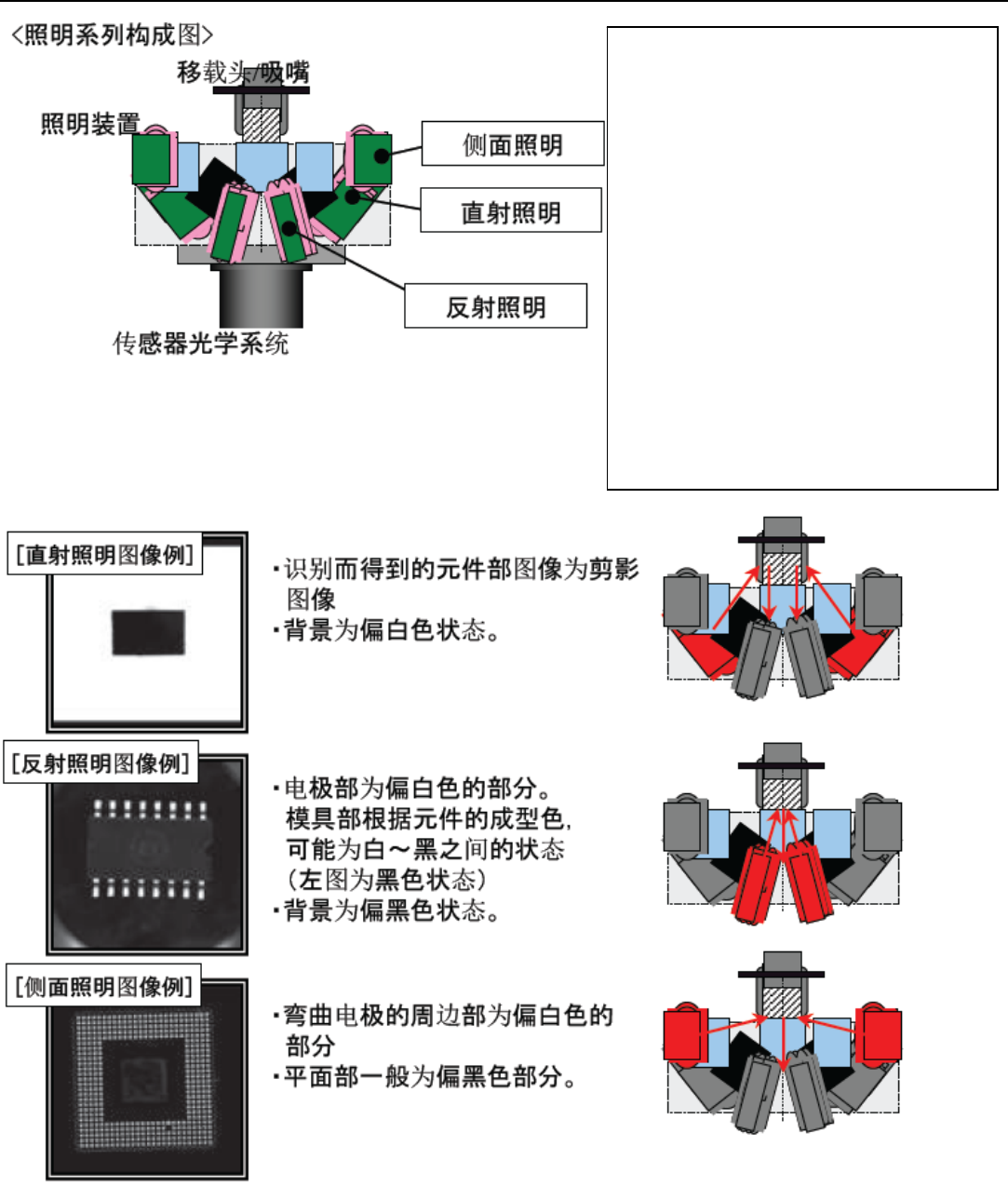
二 识别系统构成
各构成部位照明的功能
直射照明:在元件背景部照射光,使其产生
元件剪影图像。
使用在元件电极部不发光(镜面电极)或通
过元件外形进行元件定位时。
反射照明:在元件下面照射光,使其产生元
件电极部图像。
使用在通过元件下面的电极部进行定位或
吸嘴外形大小大于元件大小时。
侧面照明:在元件侧面照射光,使其产生元
件侧面部的图像。
使用在电极形状弯曲(BGA 元件、J 引线元
件)需要准确识别电极外形时。
- 3 -
三 各形状检测方法的简要说明
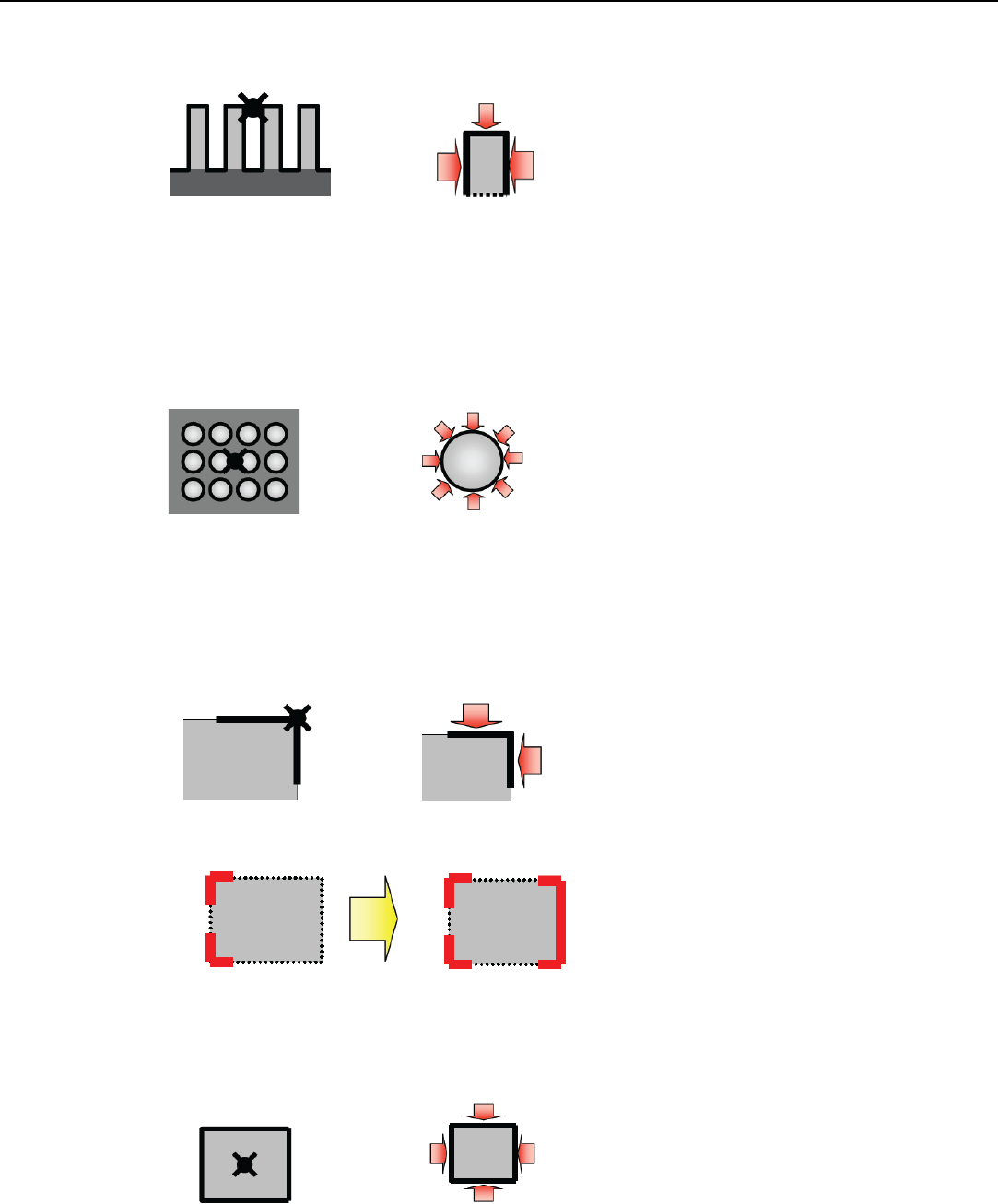
1) 引线组
对各引线的前端方向/宽度方向的边端位置进行检测和定位。
登录的引线根数为2或2以上时,要对各引线中心位置间的距离(间距)进行检查。
※引线间有不要的模具突起等存在时,请分开登录引线组。
2) 球组
对各球的外围部的边端位置进行检测和定位。
登录的球行列数为2或2以上时,要对各球中心位置间的距离(间距)进行检查。
3) 角
对2条线各自的边端位置进行检测和定位。
由于定位只适用于2方向,因此在元件相对边/角位置登录其它形状,可使检测位置较稳定。
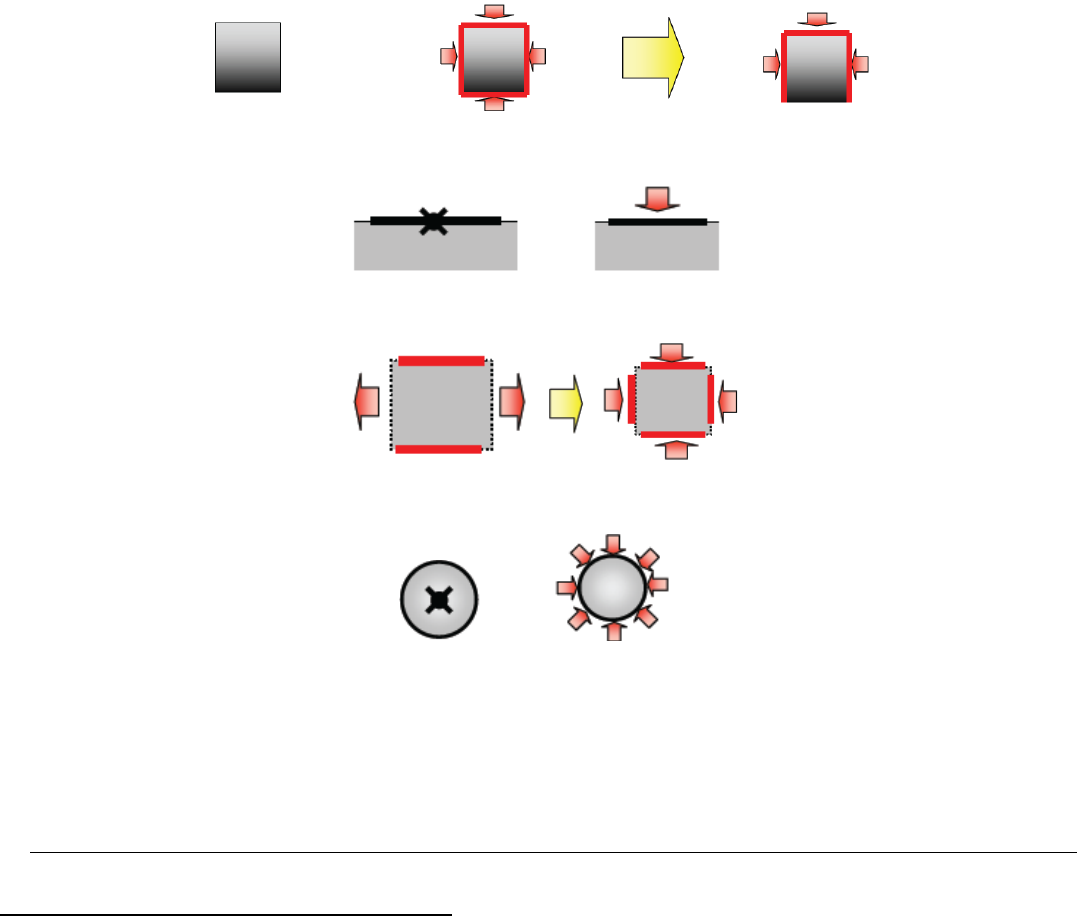
4) 长方形
对上下左右方向各边的边端位置进行检测和定位。
※引线根部等特定方向的图像边端状态不清晰时,其方向的边端检测会不稳定,在此情况下,请登录引线组为(1根)。
- 4 -
5)线形
对指定线的边端位置进行检测和定位。
※由于检测中存在方向性,因此,必须在前行方向/相反方向都要登录其它形状。
6)圆形
对外围部的边端位置进行检测和定位。
※外围部分不清晰时,请指定开始~结束角度。
・最终被检测出的元件中心位置,是根据与登录的各形状的中心位置(Cx,Cy)相对
的检测位置的平均误差向量决定的。