XP-242E-243E固有值.pdf - 第42页
7. 固有值 SY S - XP2 43 - 3.1S 42 XP - 242 E 系统手册 [ 标准设定值 ] 1 T t_MaxV × [ 说明 ] T 轴最大速度 的设定。 [ 标准设定值 ] 5000000 t_MaxA × [ 说明 ] T 轴最大加速 度的设定。 [ 标准设定值 ] 100000000 t_ptpGain × [ 说明 ] T 轴位移增益 的设定。 [ 标准设定值 ] 50 t_stGain × [ 说明 ]…
7.固有值 SYS-XP243-3.1S
41 XP-242E 系统手册
[ 标准设定值 ] 1
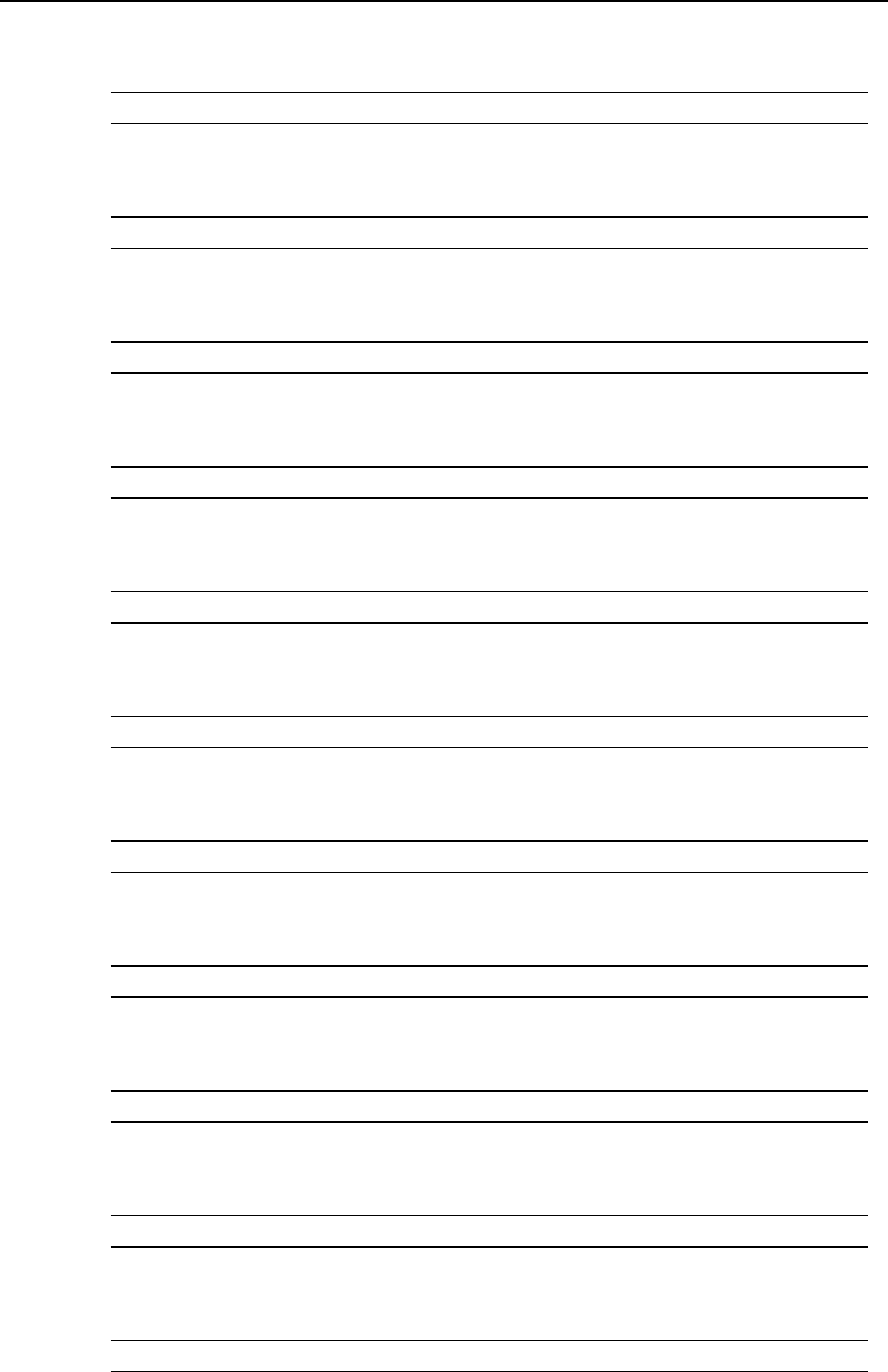
f_CurveNo ×
[ 说明 ] F 轴凸轮曲线号码的指定。
[ 标准设定值 ] 1
XP142-G
g_MaxV ×
[ 说明 ] G 轴最大速度的设定。
[ 标准设定值 ] 15000000
g_MaxA ×
[ 说明 ] G 轴最大加速度的设定。
[ 标准设定值 ] 83000000
g_ptpGain ×
[ 说明 ] G 轴位移增益的设定。
[ 标准设定值 ] 180(X372 以前)、165(X372 以后)
g_stGain ×
[ 说明 ] G 轴定位增益的设定。
[ 标准设定值 ] 180(X372 以前)、165(X372 以后)
g_afterGain ×
[ 说明 ] G 轴静止增益的设定。
[ 标准设定值 ] 180(X372 以前)、200(X372 以后)
g_P_CON_Start ×
[ 说明 ] G 轴 P_CON 开始时间(msec)的设定。
[ 标准设定值 ] 6(X372 以前)、1(X372 以后)
g_integralGain ×
[ 说明 ] G 轴的积分增益。
[ 标准设定值 ] 180(X372 以前)、200(X372 以后)
g_AxisValid —
[ 说明 ] (未使用)
[ 标准设定值 ] 1
g_spare2 —
[ 说明 ] (未使用)
[ 标准设定值 ] 1
g_CurveNo ×
[ 说明 ] G 轴凸轮曲线号码的指定。
7.固有值 SYS-XP243-3.1S
42 XP-242E 系统手册
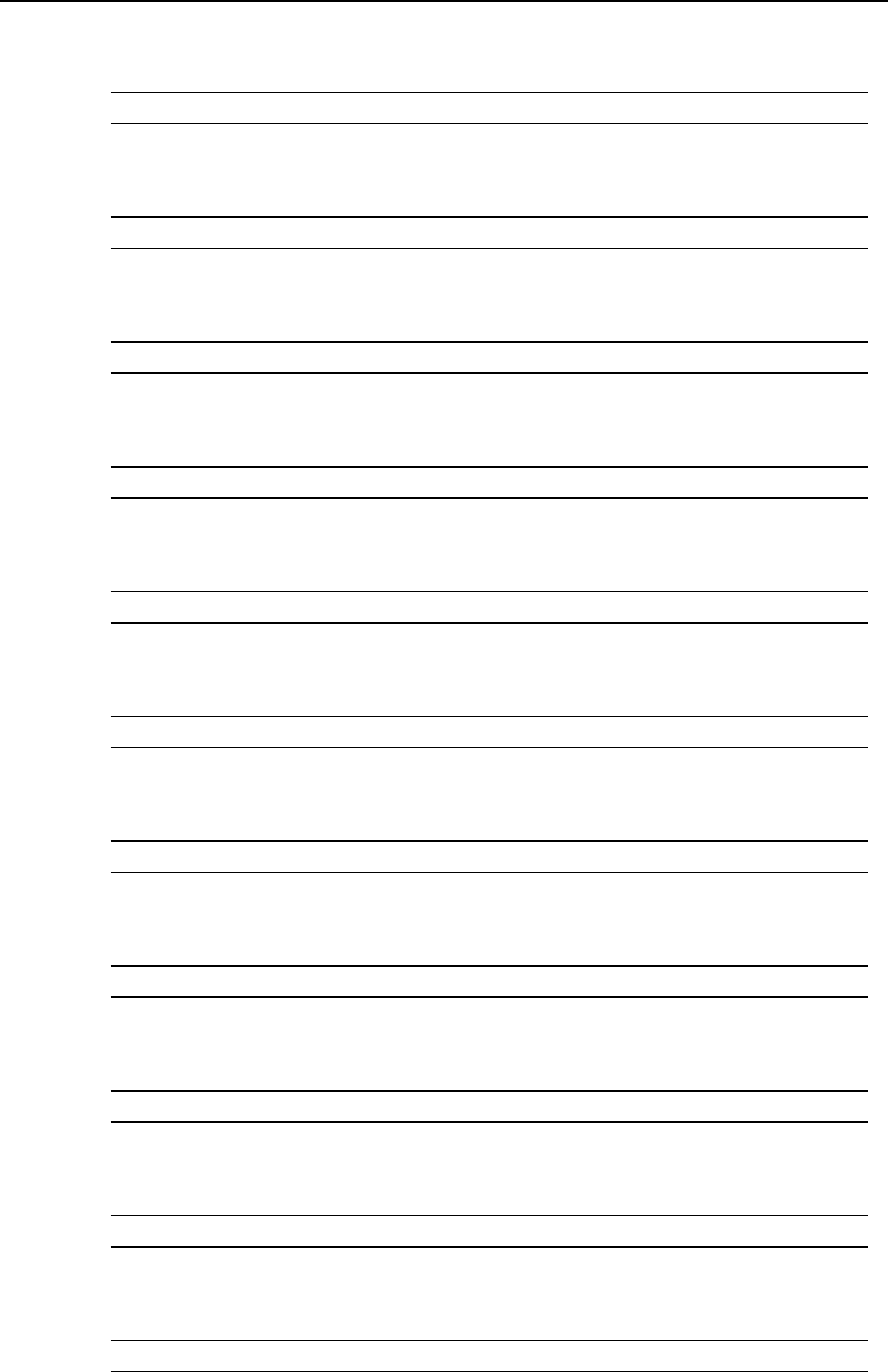
[ 标准设定值 ] 1
T
t_MaxV ×
[ 说明 ] T 轴最大速度的设定。
[ 标准设定值 ] 5000000
t_MaxA ×
[ 说明 ] T 轴最大加速度的设定。
[ 标准设定值 ] 100000000
t_ptpGain ×
[ 说明 ] T 轴位移增益的设定。
[ 标准设定值 ] 50
t_stGain ×
[ 说明 ] T 轴定位增益的设定。
[ 标准设定值 ] 1000
t_afterGain ×
[ 说明 ] T 轴静止增益的设定。
[ 标准设定值 ] 50
t_P_CON_Start ×
[ 说明 ] T 轴 P_CON 开始时间(msec)的设定。
[ 标准设定值 ] 6
t_integralGain ×
[ 说明 ] T 轴的积分增益。
[ 标准设定值 ] 50
t_AxisValid —
[ 说明 ] (未使用)
[ 标准设定值 ] 1
t_spare2 —
[ 说明 ] (未使用)
[ 标准设定值 ] 1
t_CurveNo ×
[ 说明 ] T 轴凸轮曲线号码的指定。
[ 标准设定值 ] 2
U
u_MaxV ×
[ 说明 ] U 轴最大速度的设定。
7.固有值 SYS-XP243-3.1S
43 XP-242E 系统手册
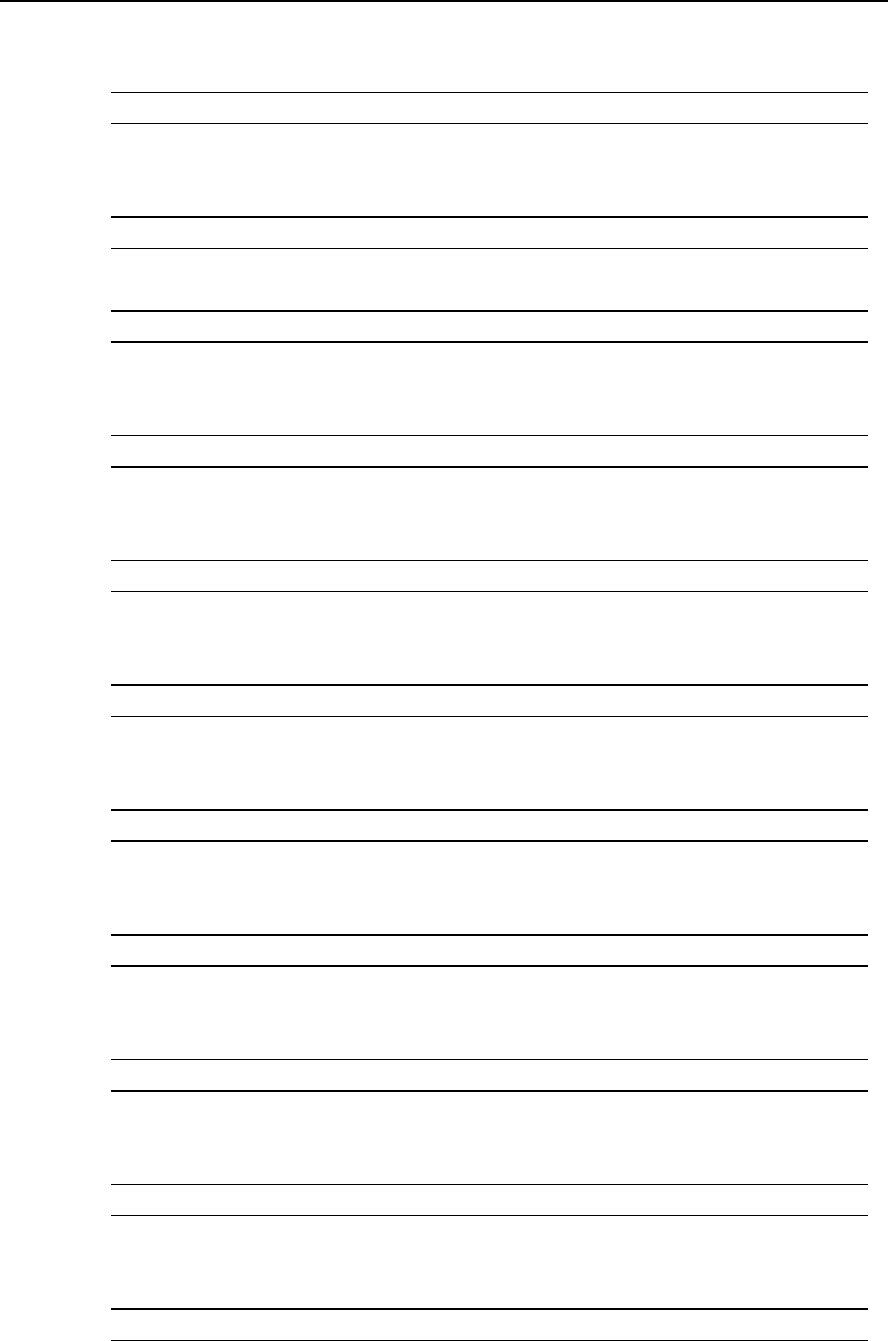
[ 标准设定值 ] 15000000
u_MaxA ×
[ 说明 ] U 轴最大加速度的设定。
[ 标准设定值 ] 7000000
u_ptpGain ×
[ 说明 ] U 轴位移增益的设定。
[ 标准设定值 ] 1000
u_stGain ×
[ 说明 ] U 轴定位增益的设定。
[ 标准设定值 ] 1000
u_afterGain ×
[ 说明 ] U 轴静止增益的设定。
[ 标准设定值 ] 50
u_P_CON_Start ×
[ 说明 ] U 轴 P_CON 开始时间(msec)的设定。
[ 标准设定值 ] 6
u_integralGain ×
[ 说明 ] U 轴的积分增益。
[ 标准设定值 ] 40
u_AxisValid —
[ 说明 ] (未使用)
[ 标准设定值 ] 1
u_spare2 —
[ 说明 ] (未使用)
[ 标准设定值 ] 1
u_CurveNo 1:2:3 ×
[ 说明 ] U 轴凸轮曲线号码的指定。
[ 标准设定值 ] 1
x_FeedforwardRatio 0~100.0 ×
[ 说明 ] X 轴 Feedforward 前馈控制比率的设定。
[ 标准设定值 ] (测定值)
y_FeedforwardRatio 0~100.0 ×
[ 说明 ] Y 轴 Feedforward 前馈控制比率的设定。
[ 标准设定值 ] (测定值)