00191912-01.pdf - 第215页
Betriebsanleitung SIPLACE 80S-20/F4 6 Visionfunktionen Softwareversion SR.406.xx Ausgabe 02/2000 DE 6.1 Die Visionsysteme am Automaten 213 6 Abb. 6.1 - 6 Visionauswerteeinheit
6 Visionfunktionen Betriebsanleitung SIPLACE 80S-20/F4
6.1 Die Visionsysteme am Automaten Softwareversion SR.406.xx Ausgabe 02/2000 DE
212
6.1.4 Visionauswerteeinheit
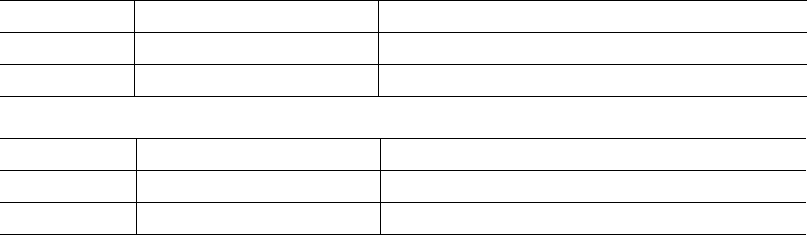
Die Visionauswerteeinheit (siehe Pos. 1 in Abb. 6.1 - 6) steckt im Steuereinschub des Automaten.
Sie verarbeitet und wertet die elektrischen Signale der BE- und LP-Kamerasysteme aus. Aus den
Sollwertabweichungen werden Korrekturwerte ermittelt, die in die Neuberechnung der Bestück-
positionen und Drehwinkel für die Bestückung eingehen. 6
Darüber hinaus führt die Visionauswerteeinheit eine Bauelementeidentifizierung durch. Stimmen
beispielsweise das synthetische Modell und die Messung der Gehäuseform nicht überein, wird
das Bauelement nicht bestückt. 6
Die exakte Bestimmung der Abhollage von Bauelementen, die insbesondere bei kleinen Bauele-
menten wichtig ist, wird ebenfalls in der Visionauswerteeinheit durchgeführt. Passmarken auf den
Zuführmodulen dienen zur Ermittlung der Lageabweichung der einzelnen Zuführmodule. 6
Die elektronischen Bildsignale von Bauelementen, LP-Passmarken und Zuführmodulmarken kön-
nen von der Visionauswerteeinheit über den Videomultiplexer an den Stationsbildschirm übertra-
gen und somit für Mess- und Testzwecke genutzt werden. 6
6
6
6
6
Legende zu Abb. 6.1 - 6
(1) Visionauswerteeinheit MVS 340
(2) COM1-Schnittstelle
(3) COM2-Schnittstelle
(4) HS
3
L-Schnittstelle
(5) Kameraanschlüsse:
(6) Kameraanschlüsse
6
S-20 F4
1 LP-Kamera, Portal 1 BE-Kamera
3 BE-Kamera, Portal 1 BE-Kamera, 12-Segment-Revolverkopf
S-20 F4
2 LP-Kamera, Portal 2 Fine-Pitch-Visionmodul
4 BE-Kamera, Portal 2 Flip-Chip-Visionmodul
Betriebsanleitung SIPLACE 80S-20/F4 6 Visionfunktionen
Softwareversion SR.406.xx Ausgabe 02/2000 DE 6.1 Die Visionsysteme am Automaten
213
6
Abb. 6.1 - 6 Visionauswerteeinheit
6 Visionfunktionen Betriebsanleitung SIPLACE 80S-20/F4
6.2 LP-Visionsystem Softwareversion SR.406.xx Ausgabe 02/2000 DE
214
6.2 LP-Visionsystem
Das LP-Visionsystem erfasst die genaue Lage der Leiterplatte durch Vermessung von Passmar-
ken und ermittelt den Versatz in X- und Y-Richtung, den Verdrehwinkel relativ zur LP-Transport-
richtung und die Scherung der LP. Auch Ausschussmarkierungen (Inkpunkte), werden vom LP-
Visionsystem erfasst und ausgewertet. 6
6.2.1 Systembeschreibung
Das LP-Visionsystem zur Leiterplattenlageerkennung besteht aus dem optischen System zur Lei-
terplattenlageerkennung und der Visionauswerteeinheit 6
Optisches System zur Leiterplattenlageerkennung 6
Jedes Portal besitzt ein eigenes LP-Lageerkennungssystem (siehe Abb. 6.1 - 5, Seite 210). 6
Visionauswerteeinheit 6
Bei jedem Automaten ist im Steuereinschub eine Auswerteeinheit zur Leiterplatten- und Bauele-
mentelageerkennung untergebracht (siehe Abb. 6.1 - 6, Seite 213). 6
Eine CCD-Kamera (SONY XC75-Kamera) mit integrierter Abbildungs- und Beleuchtungsoptik bil-
det das optische LP-Lageerkennungssystem. Das Gesichtsfeld des LP-Moduls beträgt 5,7mm x
5,7mm. Innerhalb der Maße der Gesichtsfelder kann ein Suchfeld in Lage und Größe frei pro-
grammiert werden. Die Abbildungsoptik ist eine spezielle Messoptik, die Messfehler aufgrund von
Leiterplattenwölbungen weitestgehend kompensiert. Die Beleuchtung wird nur während der Auf-
nahme von Passmarken eingeschaltet. 6
Die Visionauswerteeinheit (MVS) ist ein Einplatinensystem gemäß VME-Standard. Die Hardware
besteht aus dem 6
– MVS Motherboard mit Visionprozessor und Schnittstellenverbindungen und dem
– MVS Kamerainterface für bis zu vier CCD-Kameras.
MVS Motherboard mit Visionprozessor und Schnittstellenverbindungen 6
Auf der VME-Modulrückseite befinden sich die beiden Steckverbindungen für den VME-Bus. 6
An der Frontseite des VME-Moduls befinden sich die Anschlussstecker für 6
– den Bildschirm (VGA-Modus, 15-poliger SUBD-Stecker)
– die Hochgeschwindigkeitsschnittstelle (HS
3
L), 9-poliger SUBD-Stecker
– bis zu 4 Kameraeingänge (2 15-polige SUBD-Stecker)