00197003-04_UM_X-Serie-S_DE.pdf - 第138页
3 Technische Daten und Baugruppen Betriebsanleitung SIPLACE X-Serie 3.5 Bestückkopf Ab Softwareversion 706.1 SP1 Ausgabe 10/2014 138 3.5.2.2 T echnische Daten SIPLACE S peedS t ar (C&P20 M) 3 SIPLACE SpeedS tar (C&am…
Betriebsanleitung SIPLACE X-Serie 3 Technische Daten und Baugruppen
Ab Softwareversion 706.1 SP1 Ausgabe 10/2014 3.5 Bestückkopf
137
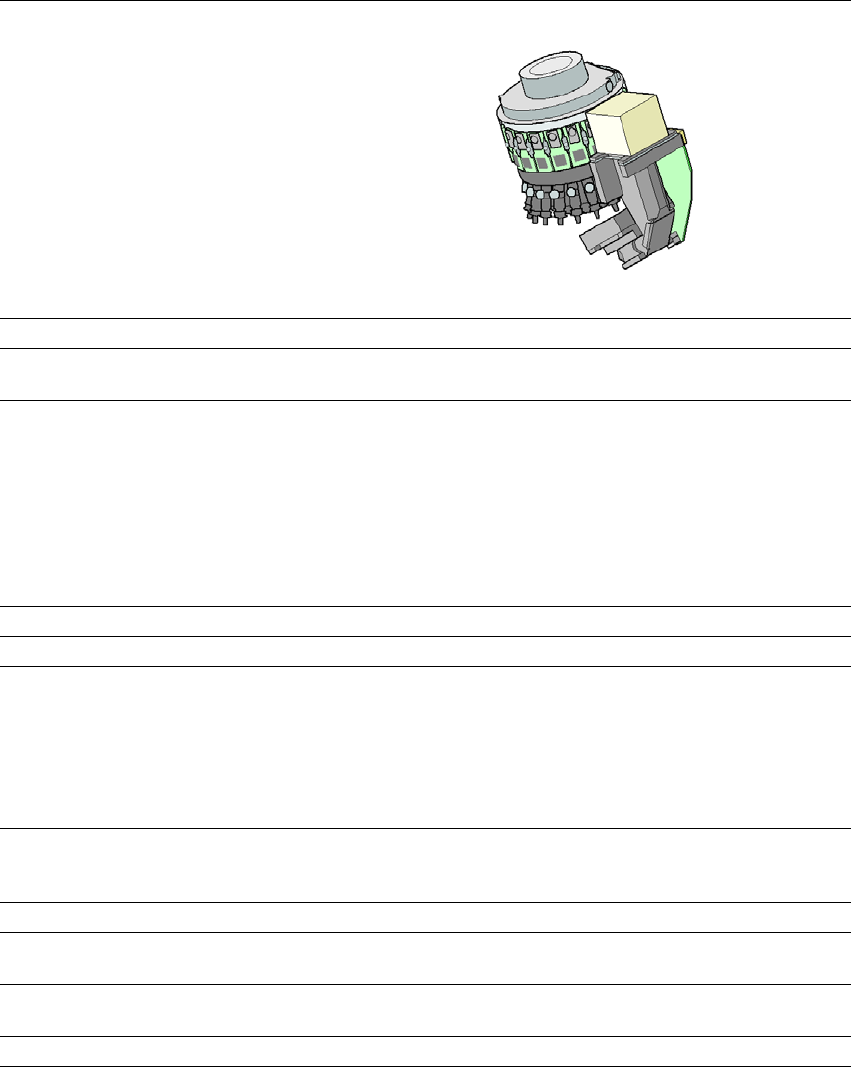
3.5.2.1 Beschreibung
Der SIPLACE SpeedStar (C&P20 M) arbeitet nach dem Collect&Place-Prinzip, d.h. innerhalb ei-
nes Zyklus werden zwanzig Bauelemente vom Bestückkopf abgeholt. Der BE-Sensor überprüft
an der Bestück- /Abholposition, ob ein Bauelement von der Pipette aufgenommen wurde. Auf dem
Weg zur Bestückposition werden die Bauelemente optisch zentriert und in die erforderliche Be-
stücklage gedreht. Danach werden sie mit Blasluft sanft und positionsgenau auf die Leiterplatte
abgesetzt.
Mit dem Bestückkopf C&P20 M gelang es, die Bestückgenauigkeit des Bestückkopfes durch eine
hochauflösenden Sternachse weiter zu steigern. Die kompakte Bauweise des C&P20 M-Kopfes
ermöglicht sehr kurze Zykluszeiten. Dabei steht die Sternachse schräg zur Leiterplattenebene. Mit
dieser Geometrie lassen sich die Segmente auf engstem Raum anordnen.
Die BE-Kamera ist weiterhin in den C&P20 M-Kopf integriert. Dies spart zusätzliche Fahrwege zu
externen Zentrierkameras. Zudem besitzt jedes Segment einen eigenen DP-Antrieb zum Rotie-
ren der Pipette. Die Pipetten werden deshalb nicht mehr an einer einzigen Kopfstation in die rich-
tige Lage gedreht. Sie können jederzeit und unabhängig voneinander in ihre Bestücklage gedreht
werden.
Jedes Segment verfügt über einen eigenen Vakuumerzeuger. Die Umschaltzeiten zwischen Va-
kuum und Blasluft ließen sich damit erheblich verkürzen. Zudem kann im Haltekreis für jede ein-
zelne Pipette eine Vakuumprüfung durchgeführt werden.
Der Z-Antrieb der Segmente ist mit einem Linearmotor mit linearem Wegmesssystem realisiert
und damit überaus präzise. In der Abhol-/Bestückposition verfährt der Z-Antrieb die Segmente in
vertikaler Richtung nach unten bzw. nach oben.
3 Technische Daten und Baugruppen Betriebsanleitung SIPLACE X-Serie
3.5 Bestückkopf Ab Softwareversion 706.1 SP1 Ausgabe 10/2014
138
3.5.2.2 Technische Daten SIPLACE SpeedStar (C&P20 M)
3
SIPLACE SpeedStar (C&P20 M)
mit BE-Kameratyp 41
BE-Spektrum
*a
*)a Beachten Sie bitte, dass das bestückbare BE-Spektrum auch von den Pad Geometrien, den kundenspezi-
fischen Standards, den BE-Verpackungstoleranzen und den BE-Toleranzen beeinflusst wird.
03015 mm bis 2220, Melf, SOT,
SOD, Bare-Die, Flip-Chip
BE-Spezifikationen
max. Höhe
min. Beinchenraster
min. Beinchenbreite
min. Ballraster
min. Balldurchmesser
min. Abmessungen
max. Abmessungen
max. Gewicht
4 mm
0,08 mm
0,03 mm
0,10 mm
0,05 mm
0,12 mm x 0,12 mm
6 mm x 6 mm
1 g
Programmierbare Aufsetzkraft 1,5 - 4,5 N
Pipettentypen 10xx, 11xx, 12xx
X/Y-Genauigkeit
*b
SIPLACE X4 S micron
Ohne „High Precision“ Option
Mit „High Precision“ Option
SIPLACE X4i S micron
*)b Die Genauigkeitswerte werden im Rahmen der Maschinenabnahme nachgewiesen und entsprechen den
Bedingungen aus dem SIPLACE Liefer- und Leistungsumfang.
± 25 µm / 3
± 20 µm / 3
± 25 µm / 3
Winkelgenauigkeit
SIPLACE X4 S micron
SIPLACE X4i S micron
± 0,5° / 3
± 0,5° / 3
Beleuchtungsebenen 5
Einstellmöglichkeiten der Beleuchtungs-
ebenen
256
5
Standardfunktionen Vakuumsensor, Kraftmessung, Kontrolle der LP-Wölbung,
Einzelaufnahme pro Bauelement
Optionen Pipettenwechsler, Sonderpipetten
Betriebsanleitung SIPLACE X-Serie 3 Technische Daten und Baugruppen
Ab Softwareversion 706.1 SP1 Ausgabe 10/2014 3.5 Bestückkopf
139
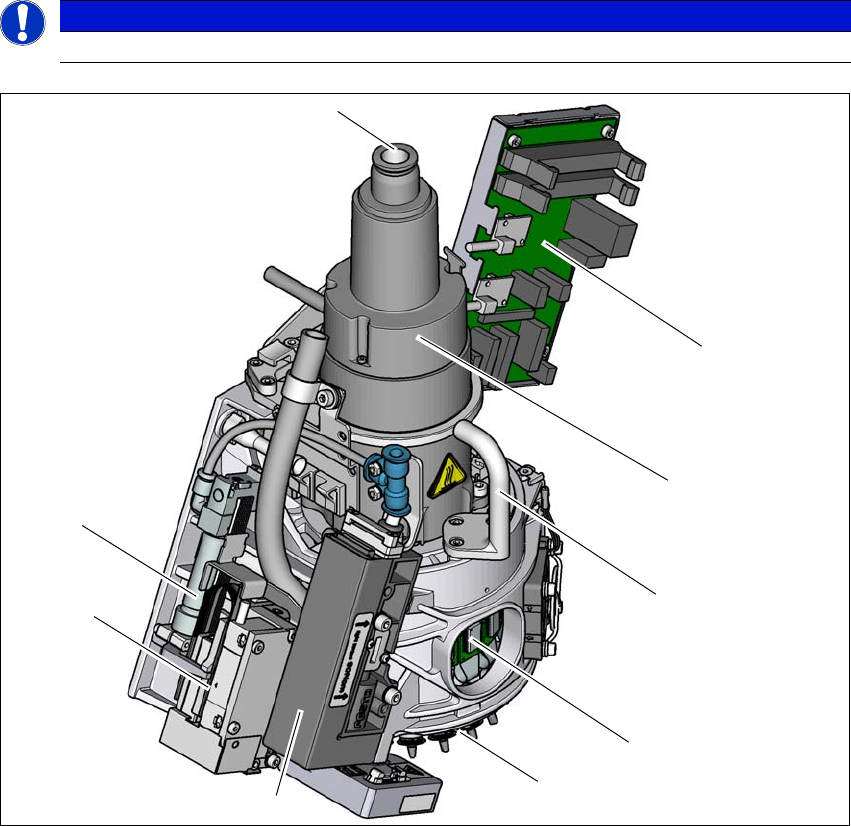
3.5.3 SIPLACE SpeedStar C&P20 P für Very High Speed Bestückung
3
3
Abb. 3.5 - 5 SIPLACE C&P20 P - Übersicht
(1) Druckluftanschluss für 20 Venturidüsen des Abhol-/Bestück- und Haltekreises
(2) Platine "Vakuumsensor Haltekreis"
(3) Sternmotor
(4) Griff
(5) DP-Antrieb, 20 Antriebe
(6) Stern mit 20 Pipetten
(7) Druckregelventil
(8) Z-Motor (Linearmotor)
(9) Rückholzylinder
HINWEIS
Verfügbar ab der Softwareversion SR.707.1
(5)
(1)
(7)
(2)
(3)
(4)
(6)
(8)
(9)