DGS 程序手册2__N7201A663C.pdf - 第527页
NPM-DGS 程序手册 6.5 添加新的元件 EJS9AC-MB-06P-28 Page 6-119 项目 说明 ‘ 卷带 ’ ‘ 前进输送 ’ 设定在吸附动作开始前是否进给编带 。有以下两种 : • [ 否 ] • [ 是 ] ‘ 吸着位置自动示教 ’ 设定是否进行吸着位置的自动示教。 有以下两种 : • [ 否 ] • [ 是 ] ‘ 拼接位置吸着位置示教 ’ 设定是否拼接位置吸着位置示教。有 以下两种 : • [ 否 ] • […
NPM-DGS
程序手册
6.5
添加新的元件
Page 6-118 EJS9AC-MB-06P-28
项目
说明
‘
重试
’
‘
吸着错误设定
’
吸着错误发生时,设定动作。有以下两种
:
• [
元件用完停止
]
• [
吸着错误停止
]
NPM
吸着的设备画面的项目名称为
[
吸附错误停止
]
。各个项目
应对以下设定。
元件用完停止
:
元件用完
吸附错误停止
: 1
次
(
立即停止
)
‘
元件用完停止
’
对吸着错误设定在
[
元件用完停止
]
中被设定的重试次数进行设定。
有如下的种类。
• [
使用机器设定
]
• [1] ~ [30]
‘
吸着错误
’
对吸着错误设定在
[
吸着错误停止
]
中被设定的重试次数进行设定。
有如下的种类。
• [
立即停止
]
• [2] ~ [5]
‘
识别错误停止
’
识别错误发生时,设定是否要执行重试动作。有以下两种
:
• [
设定次数
]
• [
立即停止
]
NPM
机型时,设备画面上的设定项目对应下列设定。
设定次数
: 3
立即停止
: 1
‘
识别错误次数
’ ‘
识别错误停止
’
在被设定为
[
设定次数
]
时设定重试次数有以下种
类。
• [1] ~ [3]
重试次数的设定只有在
AM100
有效。
AM100
以外的情况下,
在设备上设定重试次数。
‘
感应器检查
’
‘
真空传感器贴装检测
’
进行下述设定
:
确认是否通过真空传感器执行了贴装动作。
‘
真空传感器吸着检测
’
进行下述设定
:
确认是否通过真空传感器执行了吸着动作。
‘
元件厚度检出
’
设定是否进行元件厚度测量。
(
元件厚度测量传感器为选购件
)
‘
厚度偏移上限容许值
’
进行元件厚度测量时的容许上限值。
‘
厚度偏移下限容许值
’
进行元件厚度测量时的容许下限值。
‘
元件厚度计测时间时机
’
设定进行元件厚度测量的时机。有以下两种
:
• [
初次
]
进行仅初次元件吸着时的测量。
• [
每趟测量
]
进行每趟测量。
‘
插入检测
’
设定是否执行插入检测。当元件的形状不均较大或属于特殊形状
而无法稳定检测时,设为
[
否
]
。
‘
灯泡偏移
’
‘
透过灯泡偏移
’
透过灯泡的偏移量。
‘
反射灯泡偏移
’
反射灯泡的偏移量。
‘BGA
灯泡偏移
’ BGA
灯泡的偏移量。
‘PIP
灯泡偏移
’ PIP
灯泡的偏移量。
NPM-DGS
程序手册
6.5
添加新的元件
EJS9AC-MB-06P-28 Page 6-119
项目
说明
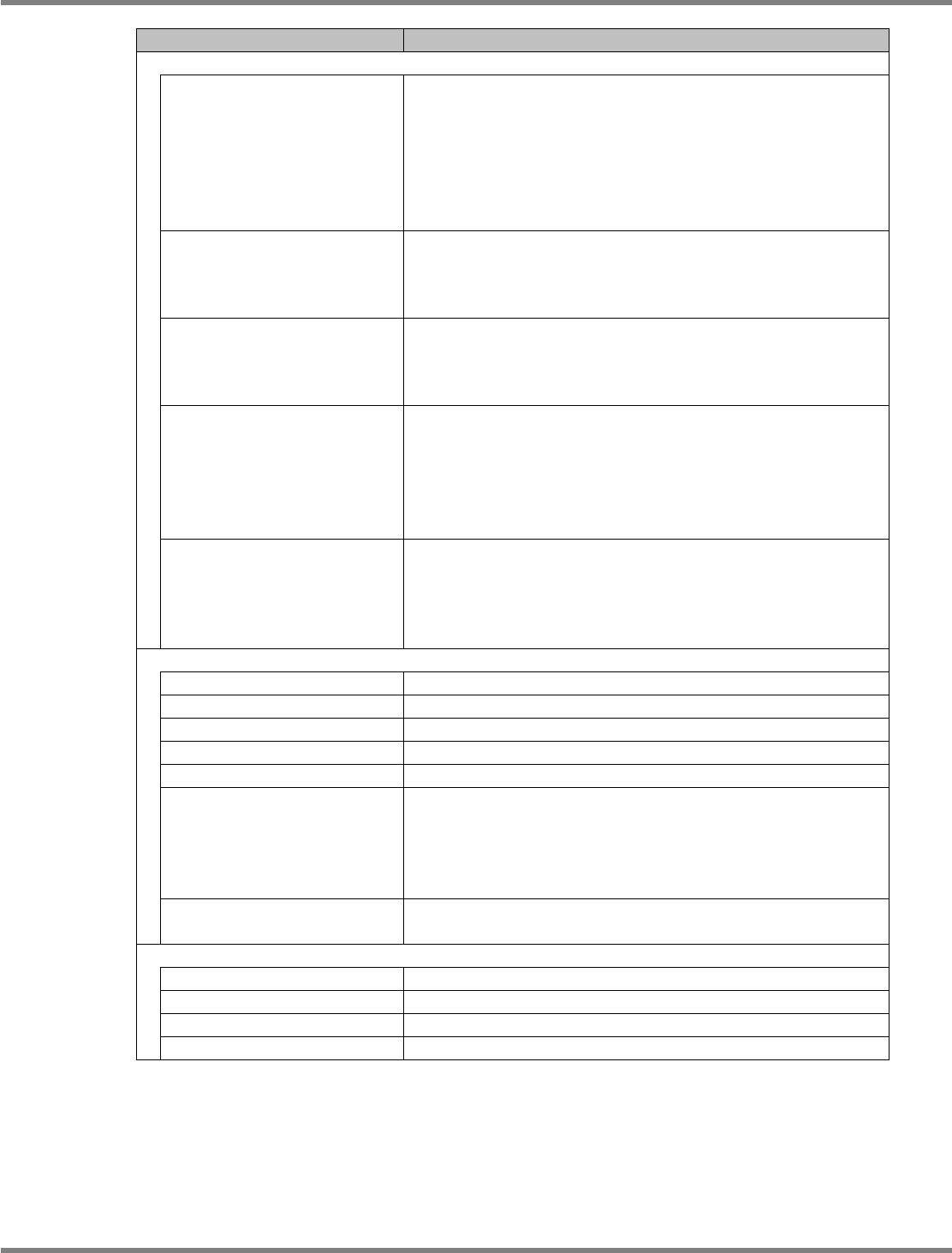
‘
卷带
’
‘
前进输送
’
设定在吸附动作开始前是否进给编带。有以下两种
:
• [
否
]
• [
是
]
‘
吸着位置自动示教
’
设定是否进行吸着位置的自动示教。有以下两种
:
• [
否
]
• [
是
]
‘
拼接位置吸着位置示教
’
设定是否拼接位置吸着位置示教。有以下两种
:
• [
否
]
• [
是
]
‘
供料器驱动速度
’
设定供料器的进给速度。有以下四种
:
• [
标准
]
• [
高速
]
• [
中速
]
• [
低速
]
‘
拼接处检测时的动作
’
设定检测接缝时的动作。有以下两种
:
• [
全部送料
]
• [
排除错误
]
‘
全部供给数
’
设定整体的供给数量。
0 ~ 300
‘
拼接警告个别设定
’
对是否对每个元件发出拼接警告进行设定。
在想要设为对每个元件发出警告时,请选择
‘
是
’
。
不想发出拼接警告时,以及在想要使用在
LNB
设定的拼接警告
开始长度时,请设为
‘
无
’
。
‘
拼接警告开始长度
’
对每个元件发出拼接警告时的警告开始长度进行设定。
0 ~ 9999
Parts060603S-20C02
NPM-DGS
程序手册
6.5
添加新的元件
Page 6-120 EJS9AC-MB-06P-28
项目
说明
‘
托盘
’
‘
升降速度
’
设定托盘升降机的速度。有以下三种
:
• [
低速
]
• [
中速
]
• [
高速
]
‘
拔出速度
’
设定托盘的拔出速度。有以下三种
:
• [
低速
]
• [
中速
]
• [
高速
]
‘
托盘位置识别
’
设定是否进行托盘位置的识别。
‘
杆管式供料器
’
‘
供料器驱动速度
’
设定棒式供料器的供给速度。速度分为下述三种
:
• [
标准
]
• [
中速
]
• [
低速
]
‘
卷带
’
‘
前进输送
’
设定在开始吸附动作之前是否供给编带。有以下两种
:
• [
否
]
• [
是
]
‘
供料器驱动速度
’
设定径向编带供料器的进给速度。有以下三种
:
• [
低速
]
• [
中速
]
• [
高速
]
‘
径向基准面高度
’
设定编带的进给孔和元件与基板相接触面之间的距离。
‘
引脚弯曲
’
针对径向编带工件元件,设定是否将引脚弯曲
90
度后插入。弯
曲引脚时,请对元件外形尺寸设定弯曲后的尺寸。
‘
轴向编带
’
‘
供料器进给
’
设定是否在开始吸附动作之前进给编带。有以下两种。
• [
不进行
]
• [
进行
]
‘
自定义供料器
’
‘
供料器驱动速度
’
设定自定义供料器的进给速度。有以下三种
:
• [
低速
]
• [
中速
]
• [
标准
]
‘
元件高度具体信息
’
‘
吸着位置
Z’
请输入吸附表面的高度。吸附面比元件表面凹进去时,请输入正
值。
0 ~
芯片尺寸
T
‘
排出高度
’
请输入贴装表面的高度。贴装面比元件表面突出时,请输入正值。
0 ~ 21
‘
元件最大高度
’
设定从引脚下端起到元件上端为止的元件合计高度。
‘
元件本体高度
’
设定在插入状态下,从基板表面到元件上端为止的高度。