20201214142122.pdf - 第13页
M O T O M A N - S P S e r i es Specifications ■ : mm : So l ut i on 1 MO TO MA N - SP Serie s SP 150 R SP 185 R YRC1 0 0 0 机器人控制柜 YRC 1000 机器人控制柜 编程示教器 4 个特征 设备更紧凑 提高作业效率 更小尺寸,减少设置空间 内置外部三轴 * ,实现无变压器 125L 容积的紧凑尺寸 客户需求 全球…
S e r i es Spec if ic a tions
■
:
mm
:
S o lution
1
MOTOMAN
-
SP Series
SP110H
SP
180H SP225H
视角 A
A
0
0
P
点
540
870
300
320 800 250
2044
1300
1103
2264
257
294 328
318
60
°
R
2044
R
687
Φ
160
Φ
125
Φ
75
B
T
S
U
L
Φ75
(中空径)
Φ200
Φ
200
P
325 1225
143
300
1150650
344
(
275
)
276
349
3061
332
0
970
0
2702
R
713
R
2702
视角 A
A
B
T
S
U
L
R
75 dia.
(中空径)
250
Φ
75
Φ
125
Φ
160
8
60
°
R
143
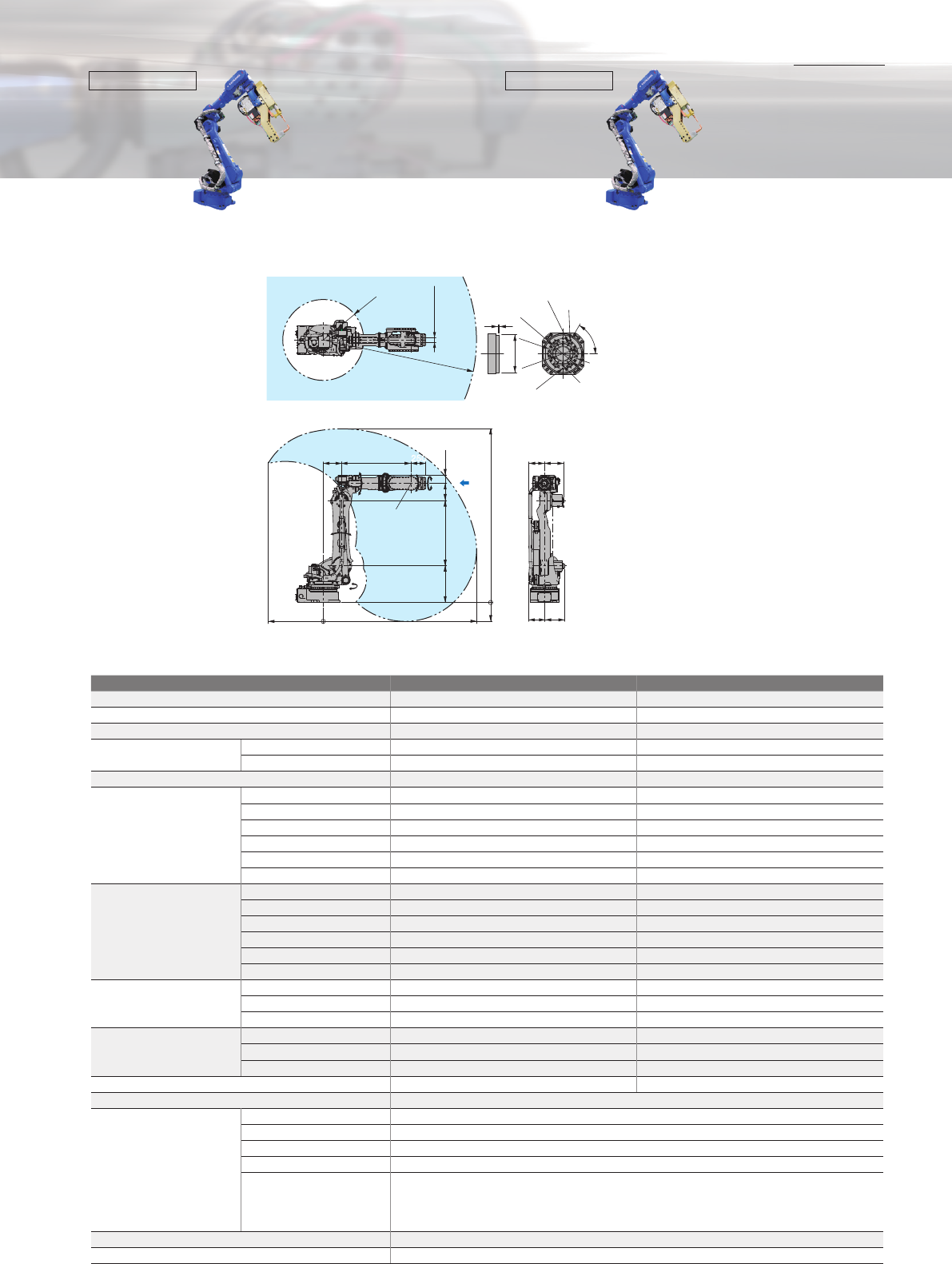
动作范围 单位
中空手臂
P点动作范围
点
中空手臂
中空手臂
6×M10×P1.5
(深17)
6×M10×P1.5
(深17)
2×Φ10
(深8)
2×Φ10
(深8)
8(
Φ200范围内)
6×M10×P1.5
(深17)
6×M10×P1.5
(深17)
2×Φ10
(深8)
2×Φ10
(深8)
*1: ISO 9283
为基准。
*2:
记载的是自轴的动作范围而不是对地基准。
*3:
因用途、动作模式而异。
标准规格
SP180H SP225H
电缆处理用法兰盘 无 无
型号
YR-1-06VXH180-A00 YR-1-06VXH225-A00
构造 垂直多关节型(
6
自由度) 垂直多关节型(
6
自由度)
可搬质量
手腕部
180 kg 225 kg
U
臂上
30 kg
30 kg
重复定位精度
*1 0.05 mm 0.05 mm
动作范围
S
轴
(旋转)
-
180°
~
+180°
-
180°
~
+180°
L
轴
(下腕) -
60°
~
+ 76°
-
60°
~
+ 76°
U
轴
(上腕)
*2
-
86°
~
+ 90°
-
86°
~
+ 90°
R
轴
(手腕旋转) -
210°
~
+210°
-
210°
~
+210°
B
轴
(手腕摆动) -
130°
~
+130°
-
130°
~
+130°
T
轴
(手腕回转) -
360°
~
+360° (
-
210°
~
+210°)*4
-
360°
~
+360° (
-
210°
~
+210°)*4
最大速度
S
轴
(旋转)
2.09 rad/s, 120°/s 2.09 rad/s, 120°/s
L
轴
(下腕)
1.69 rad/s, 97°/s 1.69 rad/s, 97°/s
U
轴
(上腕)
2.01 rad/s, 115°/s 2.01 rad/s, 115°/s
R
轴(手腕旋转)
2.62 rad/s, 150°/s 2.62 rad/s, 150°/s
B
轴
(手腕摆动)
2.62 rad/s, 150°/s 2.62 rad/s, 150°/s
T
轴
(手腕回转)
4.01 rad/s, 230°/s 4.01 rad/s, 230°/s
容许力矩
R
轴(手腕旋转)
1000 N·m 1372 N·m
B
轴(手腕摆动)
1000 N·m 1372 N·m
T
轴
(手腕回转)
618 N·m 735 N·m
容许惯性力矩
(
GD
2
/4
)
R
轴(手腕旋转)
104 kg·m
2
209.8 kg·m
2
B
轴(手腕摆动)
104 kg·m
2
209.8 kg·m
2
T
轴
(手腕回转)
52 kg·m
2
162.1 kg·m
2
本体质量
1090 kg 1090 kg
保护等级 本体
: IP54,
手腕轴
: IP65
设置环境
温度
0 ˚C ~ +45 ˚C
湿度
20% ~ 80%RH (
无结露
)
振动加速度
4.9 m/s
2
(0.5 G)
以下
标高
1000 m
以下
其他
无引燃性或腐蚀性气体、液体
无水、油、粉尘
远离电气噪音源
无强磁场
电源容量
*3 5.0 kVA
设置方式 置地式
*4: 安装有安川标准的管线包时,动作范围是()内的数值。
注
:
本表记载的是
SI
单位。
* SP180, SP225H
的外形尺寸及动作范围相同。
11
M O T O M A N
-
S P S e r i es Specifications
■
:
mm
:
Sol uti on
1
MOTOMAN
-
SP Series
SP150R SP185R
YRC1000
机器人控制柜
YRC1000 机器人控制柜
编程示教器
4个特征
设备更紧凑
提高作业效率
更小尺寸,减少设置空间
内置外部三轴* ,实现无变压器
125L容积的紧凑尺寸
客户需求
全球标准尺寸
·
海外各规格共通
·
·
适用新动作控制(高精度·高速化)
·
·
编程示教器轻量化·提高操作性
·
重量仅为730g
·
■
*
:
■
机器人控制柜 YRC1000 规格
项目
外形尺寸
概略质量
冷却方式
周围温度
相对湿度
标高
电源规格
输入输出信号
位置控制方式
储存容量
扩张插槽
LAN (上位连接)
串口I/F
控制方式
驱动单元
防尘构造IP54(背面FAN部:IP2X)
598(宽)×427(深)×490(高)mm, 125L
85 kg以下
(可内置外部3轴)*
间接冷却
通电时:0℃~+45℃ 保管时:-10℃~+60℃
90% 以下(无结露)
2000 m
(
但会存在温度延迟
)
(注)标高1000m以上的条件:按周围最高温度每上升100m减少1%
三相AC200V~240V(+10% ~ -15%)50/60Hz(±2%)
三相AC380V~480V(+10% ~ -15%)50/60Hz(±2%)
(中性点接地)
控制柜型号不同,可连接的电源规格也不相同。
专用信号:输入19,输入6
通用信号:输入40,输出40(晶体管输出32,继电器输出8)
串行通信方式(绝对值编码器)
JOB:200,000程序点, 10,000机器人命令
CIO 梯形图
:
最大20,000程序点
PCI express
:
2 插槽
2
(
10BASE
-
T/100BASE
-
TX
)
RS
-
232
C
:
1ch
软件伺服
AC伺服用伺服包
外形尺寸
概略质量
材质
操作设备
显示屏
保护等级
电缆长度
152(宽)×49.5(厚)×300(高)mm
0.730 kg
强化塑料
选择键,轴操作键,数值/应用键,带钥匙切换模式键(示教模式、再现模式、远程模式)
急停键,使能键,SD卡I/F装置(SD卡为选配),USB端口(USB2.0 1接口)
5.7英寸TFT彩色液晶触摸屏VGA(640×480像素)
(汉字、平假名、片假名、英文、数字、其他)
IP54
标准8m,最大(选配):36m(追加延长电缆)
YRC1000
现有机型
实现了内置外部3轴且无需变压器的尺寸!
S o lution
2
MOTOMAN
-
SP Series
Solution
2
Φ
92
Φ
125
Φ63
Φ180
8
30
°
2850
310
0
3140
1932
P
点
0
795
0
R
1232
R
3140
740
1150
250 153
1225
250
555 365
R
B
T
S
U
L
视角 A
A
8
Φ
92
Φ
125
Φ63
Φ160
视角 A
R
1212
R
3140
555 365
L
S
R
U
T
30
°
2850
310
0 0
3140
1932
P
点
0
795
740 1150
250 153
1225
225
8
B
8
A
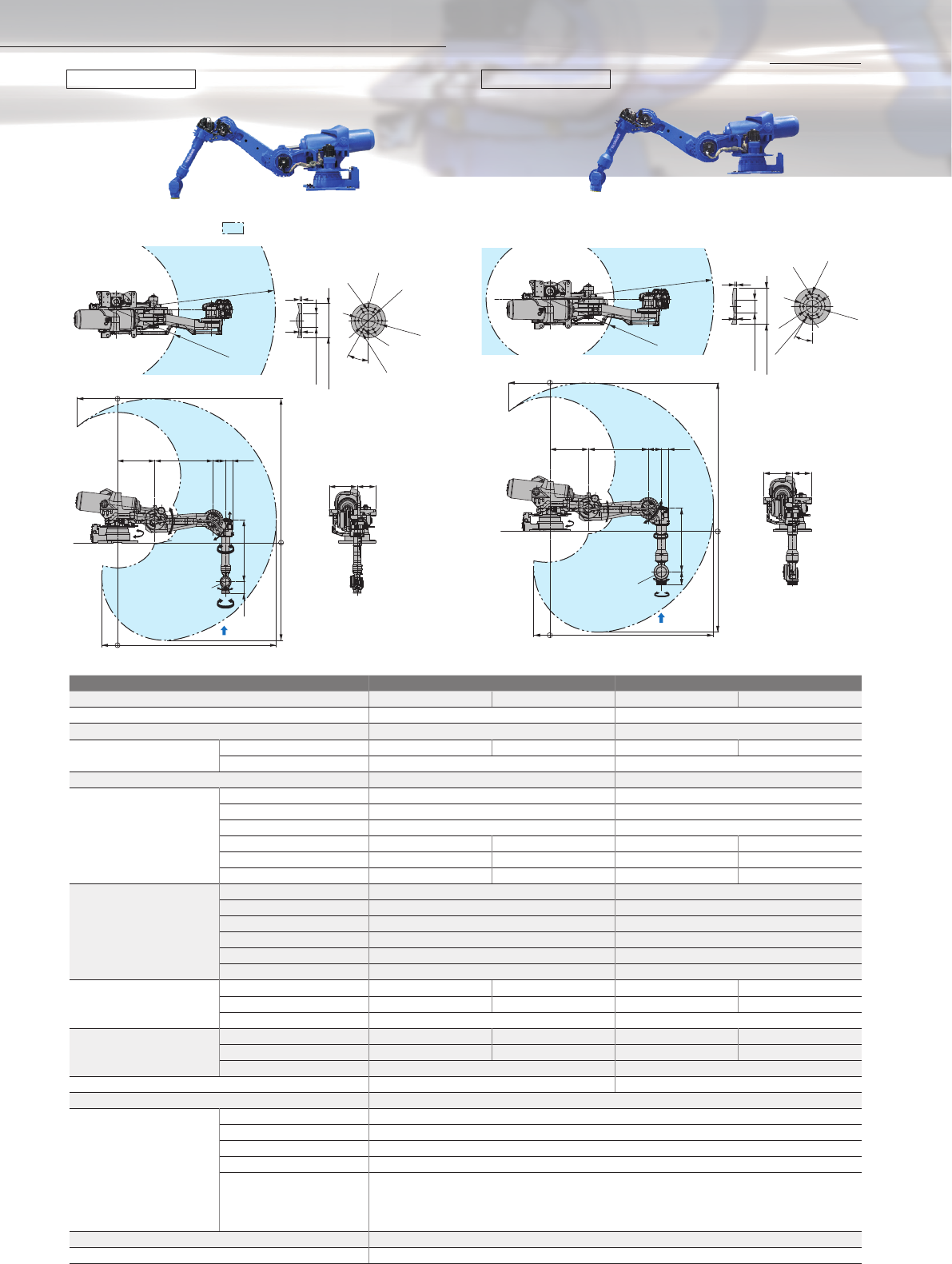
置架式 置架式
动作范围 单位
P点动作范围
6×M10×P1.5
(深12)
6×M10×P1.5
(深12)
6×M10×P1.5
(深12)
6×M10×P1.5
(深12)
2×Φ10
(深8)
(深8)
2×Φ10
2×
Φ9
(深8)
2×Φ9
(深8)
客户需求
客户需求
客户需求
提高作业效率
设备标准化
规格
项目 规格
构造
依照欧洲规格(CE规格),北美规格(UL规格)
中国规格为3相380V规格,无需变压器
通过新加减速控制,与现有机型相比改善最大约10%循环
时间(根据条件而异)。
通过动作速度的变动大幅改善轨迹精度误差
(与现有机型相比提高80%)
机器人的示教位置姿势可以3D机器人模型确认
·
可通过触摸屏画面直接操作
编程示教器规格
SP100B可内置外部2轴。
·
接地
AC200V~240V规格:根据GB T50065交流电气装置的接地设计规格,按照低压电气装置的接地进行连接。
AC380V~480V规格:根据GB T50065交流电气装置的接地设计规格,按照低压电气装置的接地进行连接。
*1: ISO 9283
为基准。
*2:
记载的是自轴的动作范围而不是对地基准。
*3:
因用途、动作模式而异。
注 : 本表记载的是 SI单位。
标准规格
SP150R SP185R
电缆处理用法兰盘 无 有 无 有
型号
YR-1-06VR165-A00 YR-1-06VR200-A00
构造 垂直多关节型(
6
自由度) 垂直多关节型(
6
自由度)
可搬质量
手腕部
165 kg 150 kg 200 kg 185 kg
U
臂上
30 kg 30 kg
重复定位精度
*1 0.05 mm 0.05 mm
动作范围
S
轴
(旋转)
-
180°
~
+180°
-
180°
~
+180°
L
轴
(下腕) -
130°
~
+ 80°
-
130°
~
+ 80°
U
轴
(上腕)
*2
-
79.4°
~
+ 78°
-
78.4°
~
+ 78°
R
轴
(手腕旋转) -
360°
~
+360°
-
205°
~
+205°
-
360°
~
+360°
-
205°
~
+205°
B
轴
(手腕摆动) -
130°
~
+130°
-
120°
~
+120°
-
125°
~
+125°
-
120°
~
+120°
T
轴
(手腕回转) -
360°
~
+360°
-
180°
~
+180°
-
360°
~
+360°
-
180°
~
+180°
最大速度
S
轴
(旋转)
1.83 rad/s, 105°/s 1.57 rad/s, 90°/s
L
轴
(下腕)
1.83 rad/s, 105°/s 1.48 rad/s, 85°/s
U
轴
(上腕)
1.83 rad/s, 105°/s 1.48 rad/s, 85°/s
R
轴(手腕旋转)
3.05 rad/s, 175°/s 2.09 rad/s, 120°/s
B
轴
(手腕摆动)
2.62 rad/s, 150°/s 2.09 rad/s, 120°/s
T
轴
(手腕回转)
4.19 rad/s, 240°/s 3.32 rad/s, 190°/s
容许力矩
R
轴(手腕旋转)
921 N·m 868 N·m 1344 N·m 1291 N·m
B
轴(手腕摆动)
921 N·m 868 N·m 1344 N·m 1291 N·m
T
轴
(手腕回转)
490 N·m 715 N·m
容许惯性力矩
(
GD
2
/4
)
R
轴(手腕旋转)
85 kg·m
2
83 kg·m
2
143 kg·m
2
141 kg·m
2
B
轴(手腕摆动)
85 kg·m
2
83 kg·m
2
143 kg·m
2
141 kg·m
2
T
轴
(手腕回转)
45 kg·m
2
80 kg·m
2
本体质量
1760 kg 1830 kg
保护等级 本体
: IP54,
手腕轴
: IP67
设置环境
温度
0 ˚C
~
+45 ˚C
湿度
20%
~
80%RH (non-condensing)
振动加速度
4.9 m/s
2
(0.5 G)
以下
标高
1000 m
以下
其他
无引燃性或腐蚀性气体、液体
无水、油、粉尘
远离电气噪音源
无强磁场
电源容量
*3 5.0 kVA
设置方式 置架式
12
M O T O M A N
-
S P S e r i es Specifications
■
:
mm
:
Sol uti on
1
MOTOMAN
-
SP Series
SP150R SP185R
YRC1000
机器人控制柜
YRC1000 机器人控制柜
编程示教器
4个特征
设备更紧凑
提高作业效率
更小尺寸,减少设置空间
内置外部三轴* ,实现无变压器
125L容积的紧凑尺寸
客户需求
全球标准尺寸
·
海外各规格共通
·
·
适用新动作控制(高精度·高速化)
·
·
编程示教器轻量化·提高操作性
·
重量仅为730g
·
■
*
:
■
机器人控制柜 YRC1000 规格
项目
外形尺寸
概略质量
冷却方式
周围温度
相对湿度
标高
电源规格
输入输出信号
位置控制方式
储存容量
扩张插槽
LAN (上位连接)
串口I/F
控制方式
驱动单元
防尘构造IP54(背面FAN部:IP2X)
598(宽)×427(深)×490(高)mm, 125L
85 kg以下
(可内置外部3轴)*
间接冷却
通电时:0℃~+45℃ 保管时:-10℃~+60℃
90% 以下(无结露)
2000 m
(
但会存在温度延迟
)
(注)标高1000m以上的条件:按周围最高温度每上升100m减少1%
三相AC200V~240V(+10% ~ -15%)50/60Hz(±2%)
三相AC380V~480V(+10% ~ -15%)50/60Hz(±2%)
(中性点接地)
控制柜型号不同,可连接的电源规格也不相同。
专用信号:输入19,输入6
通用信号:输入40,输出40(晶体管输出32,继电器输出8)
串行通信方式(绝对值编码器)
JOB:200,000程序点, 10,000机器人命令
CIO 梯形图
:
最大20,000程序点
PCI express
:
2 插槽
2
(
10BASE
-
T/100BASE
-
TX
)
RS
-
232
C
:
1ch
软件伺服
AC伺服用伺服包
外形尺寸
概略质量
材质
操作设备
显示屏
保护等级
电缆长度
152(宽)×49.5(厚)×300(高)mm
0.730 kg
强化塑料
选择键,轴操作键,数值/应用键,带钥匙切换模式键(示教模式、再现模式、远程模式)
急停键,使能键,SD卡I/F装置(SD卡为选配),USB端口(USB2.0 1接口)
5.7英寸TFT彩色液晶触摸屏VGA(640×480像素)
(汉字、平假名、片假名、英文、数字、其他)
IP54
标准8m,最大(选配):36m(追加延长电缆)
YRC1000
现有机型
实现了内置外部3轴且无需变压器的尺寸!
S o lution
2
MOTOMAN
-
SP Series
Solution
2
Φ
92
Φ
125
Φ63
Φ180
8
30
°
2850
310
0
3140
1932
P
点
0
795
0
R
1232
R
3140
740
1150
250 153
1225
250
555 365
R
B
T
S
U
L
视角 A
A
8
Φ
92
Φ
125
Φ63
Φ160
视角 A
R
1212
R
3140
555 365
L
S
R
U
T
30
°
2850
310
0 0
3140
1932
P
点
0
795
740 1150
250 153
1225
225
8
B
8
A
置架式 置架式
动作范围 单位
P点动作范围
6×M10×P1.5
(深12)
6×M10×P1.5
(深12)
6×M10×P1.5
(深12)
6×M10×P1.5
(深12)
2×Φ10
(深8)
(深8)
2×Φ10
2×
Φ9
(深8)
2×Φ9
(深8)
客户需求
客户需求
客户需求
提高作业效率
设备标准化
规格
项目 规格
构造
依照欧洲规格(CE规格),北美规格(UL规格)
中国规格为3相380V规格,无需变压器
通过新加减速控制,与现有机型相比改善最大约10%循环
时间(根据条件而异)。
通过动作速度的变动大幅改善轨迹精度误差
(与现有机型相比提高80%)
机器人的示教位置姿势可以3D机器人模型确认
·
可通过触摸屏画面直接操作
编程示教器规格
SP100B可内置外部2轴。
·
接地
AC200V~240V规格:根据GB T50065交流电气装置的接地设计规格,按照低压电气装置的接地进行连接。
AC380V~480V规格:根据GB T50065交流电气装置的接地设计规格,按照低压电气装置的接地进行连接。
13