20201214142122.pdf - 第18页
S o lution 4 M OT O MA N - SP Ser ie s So l ut i on 3 MO TO MA N - SP Serie s 点焊用管线包 定位用机器人,行走台车 上腕部搭载模块 基座部 接口模块 旋转部搭载模块 电缆模块 ( SLUR 轴) 电缆模块 ( BT 轴) 工具部 接口模块 提供简易的模块式管线包构成 (部分机型除外 * ) 安川实现了电缆和搭载功能的模块化,提供简易且维护性高,功能性的新型管线…
S o lution
2
MOTOMAN
-
SP Series
Sol ution
2
YRC1000适用于点焊的功能
执行点焊命令时,每次打点时进行焊接板厚的检测。工件出现缺失时,以报警示意。
无需使用传感器就能够检测到工件的缺少或者2枚重叠、错误设置。
工件发生缺失或2枚重叠、设置错误时,
与正常情况进行比较,
变更接触位置(板厚)。
板厚检测功能
工件设置错误时的检测
正常时
异常时
在示教器上可以以波形显示机器人的数据及焊接控制的数据,使焊接品质可视化。
点焊监控及图表显示功能(选项)
【使用场合】
·
建立生产线时确认焊接条件
·
发生打点不良时确认焊接状况
·
修正焊接条件作业时确认波形
* 本功能需要与NADEX公司的焊接控制器组合使用,详细内容请向本公司营业部门问询。
机器人数据
·
焊枪加压指令
·
焊枪轴移动量
焊接控制
焊接电流值
焊接电阻值
IO 信号
【显示项目】
NEW
YRC1000仅需输入板组条件就可以自动计算出推荐焊接条件,使加压力文件和焊接控制器的设定条件更容易。
点焊条件引导功能(选项)
NEW
提高焊接品质
客户需求
【推荐焊接条件】
·
焊枪加压力
·
通电时间
·
焊接电流
·
保持时间
按下“写入”设定推荐焊接条件
按下“计算”键
计算出推荐焊接条件
【原有方法】
【本功能】
第1枚
第2枚
第3枚
需要槽口
(
冲压模具非常昂贵
)
需要2次打点
可动侧电极帽
工件
固定侧电极帽
工件缺失
工件
(2枚重叠)
①
接近
②
加压切削
③
完成后放开
【电极修磨动作专用命令画面】
可动侧电极帽
固定侧电极帽
【设定项目】
输入板组条件
材质、张力、板厚、枚数
【电极修磨条件画面】
压力、时间、清扫量及
修磨条件,由电极修磨条件
文件进行设定管理。
*
本功能需要与NADEX公司的焊接控制器组合使用,
详细内容请向本公司营业部门问询。
·
根据控制器型号不同可能出现无法使用本功能的情况。
详细内容请向本公司营业部门问询。
·
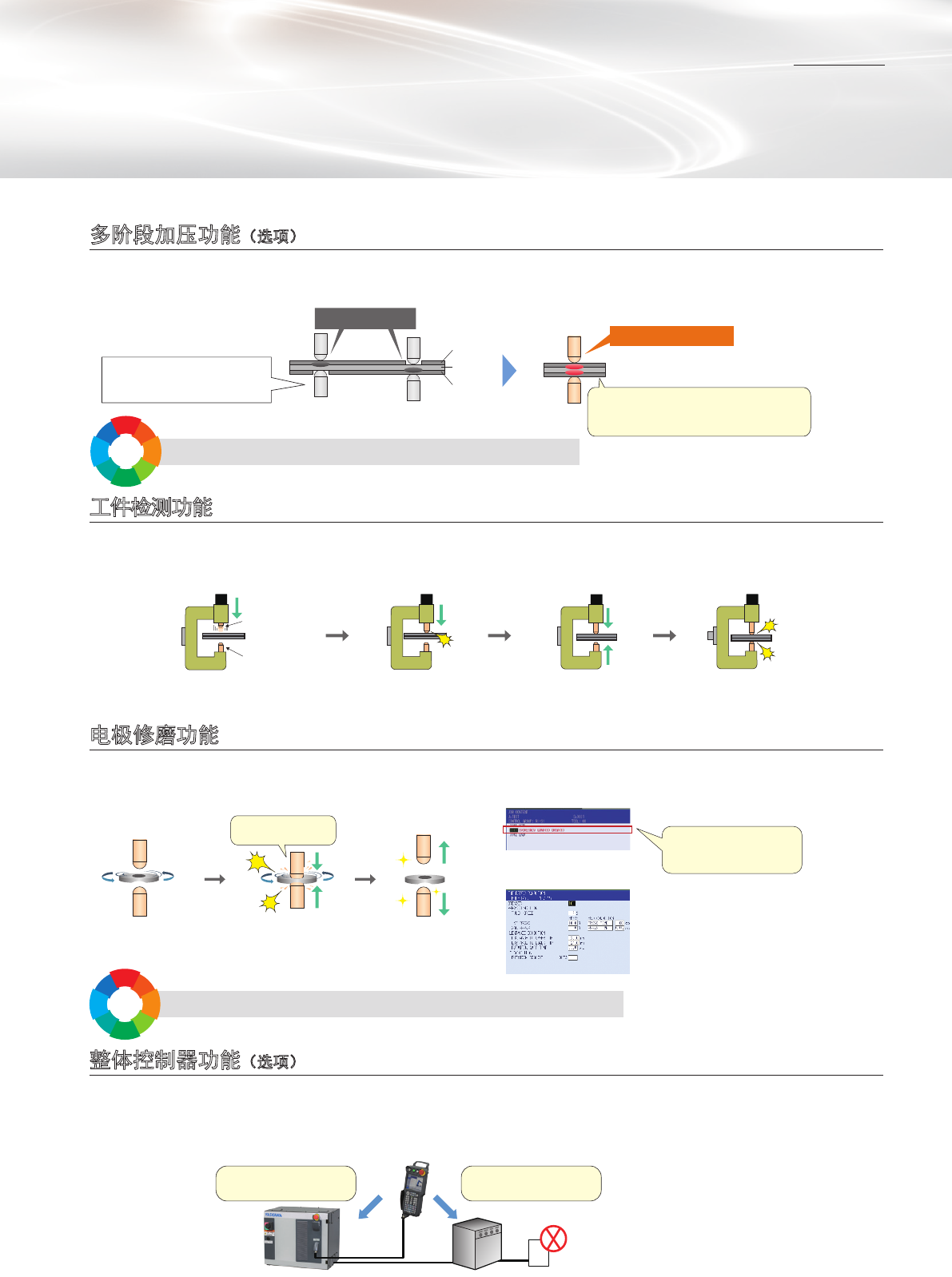
可对板厚大的多枚进行焊接
·
无飞溅,提高焊接品质
通过使加压力和电流同步,使减少飞溅的焊接条件或多枚焊接条件的生成更容易。
多阶段加压功能(选项)
1次打点同时焊接3枚
可在看不见的状态进行焊枪固定侧电极帽与可动侧电极帽的示教。
在离开工件的位置,固定侧电极帽、可动侧电极帽自动进行动作检测工件的位置,缩短示教时间。
工件检测功能
①
开始检测
可动侧下降
②
接触工件
③
可动侧电极帽下降,
固定侧电极帽上升
④
工件检测结束
减少设备安装和维护的工数!
上下同时接触
生成了电极修磨动作的专用命令和专用设定文件。
另外,通过1点示教使示教时间缩短及上下同时接触,实现了上下切削量的安定。
电极修磨功能
无需
通常个别管理的控制器内的焊接条件(焊接电流、焊接时间)可在示教器上进行编辑。
另外,可在示教器上确认焊接的结果。无需专用基板,DeviceNet通信基板即可对应。
整体控制器功能(选项)
控制器
控制器用
编程示教器
机器人控制柜YRC 1000
可编辑焊接条件
编程示教器
提高设备安装、运行、维护的效率!
客户需求
客户需求
焊接启动条件信号
焊接结束信号
计算出的结果可以通过按键的关联操作
可编辑焊接条件
电极修磨动作专用
命令仅1行(点)
·
·
·
·
15
S o lution
4
MOTOMAN
-
SP Series
Sol uti on
3
MOTOMAN
-
SP Series
点焊用管线包
定位用机器人,行走台车
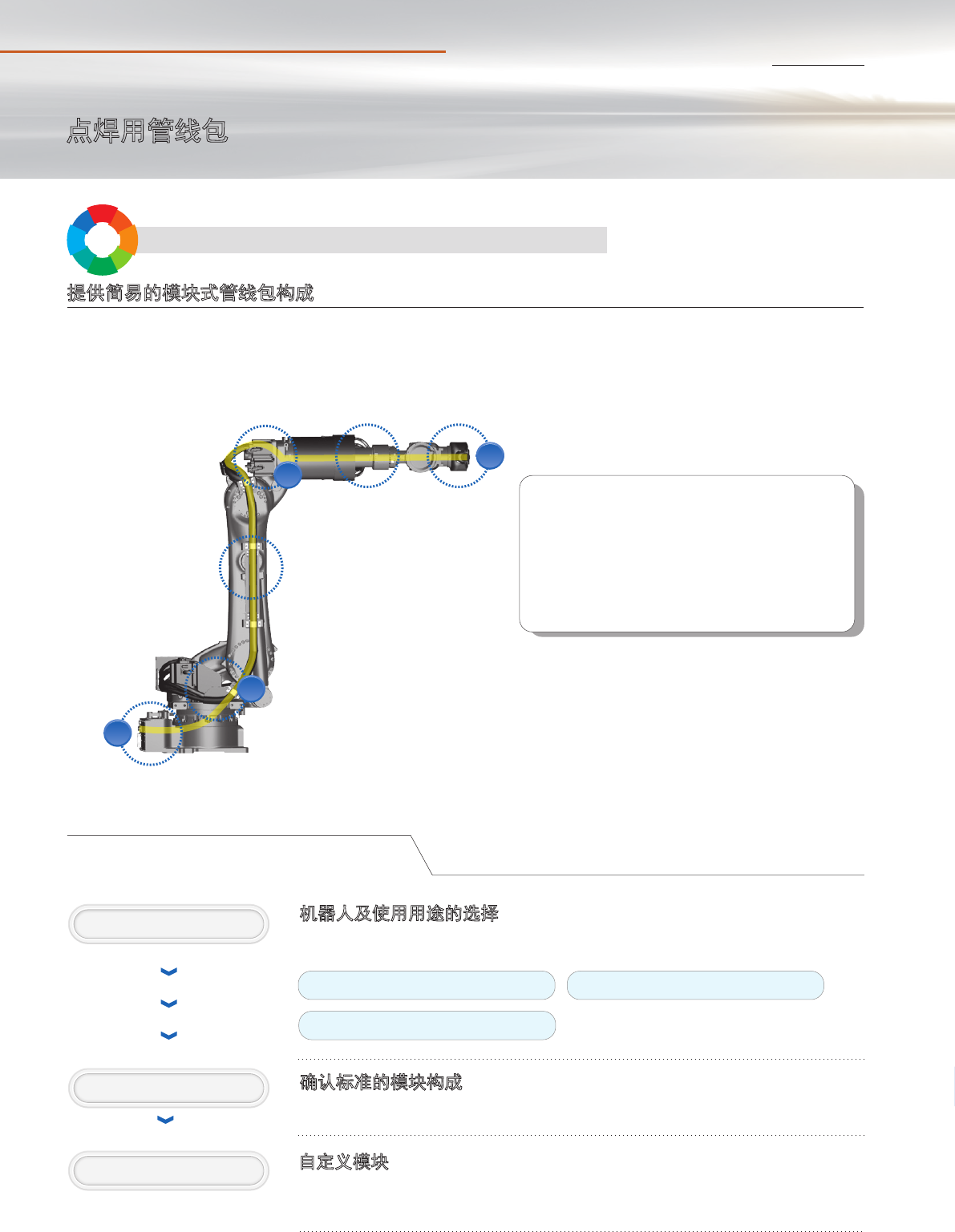
上腕部搭载模块
基座部
接口模块
旋转部搭载模块
电缆模块
(SLUR 轴)
电缆模块
(BT 轴)
工具部
接口模块
提供简易的模块式管线包构成
(部分机型除外*)
安川实现了电缆和搭载功能的模块化,提供简易且维护性高,功能性的新型管线包。
机器人及使用用途的选择
确认标准的模块构成
STEP
1
STEP
2
STEP
3
自定义模块
请选择使用的机器人和使用用途。
请确认对应机器人、使用用途的标准模块构成。
*
对应机型
:
MOTOMAN
-
SP100, SP100B, SP165, SP210
有关其他机型请向我司营业部门问询。
如需自定义
各模块可根据客户的规格进行定制。
请从可选模块中进行选择。
选定管线包的步骤
MOTOMAN
-
MSC35
MOTOMAN
-
UH100D
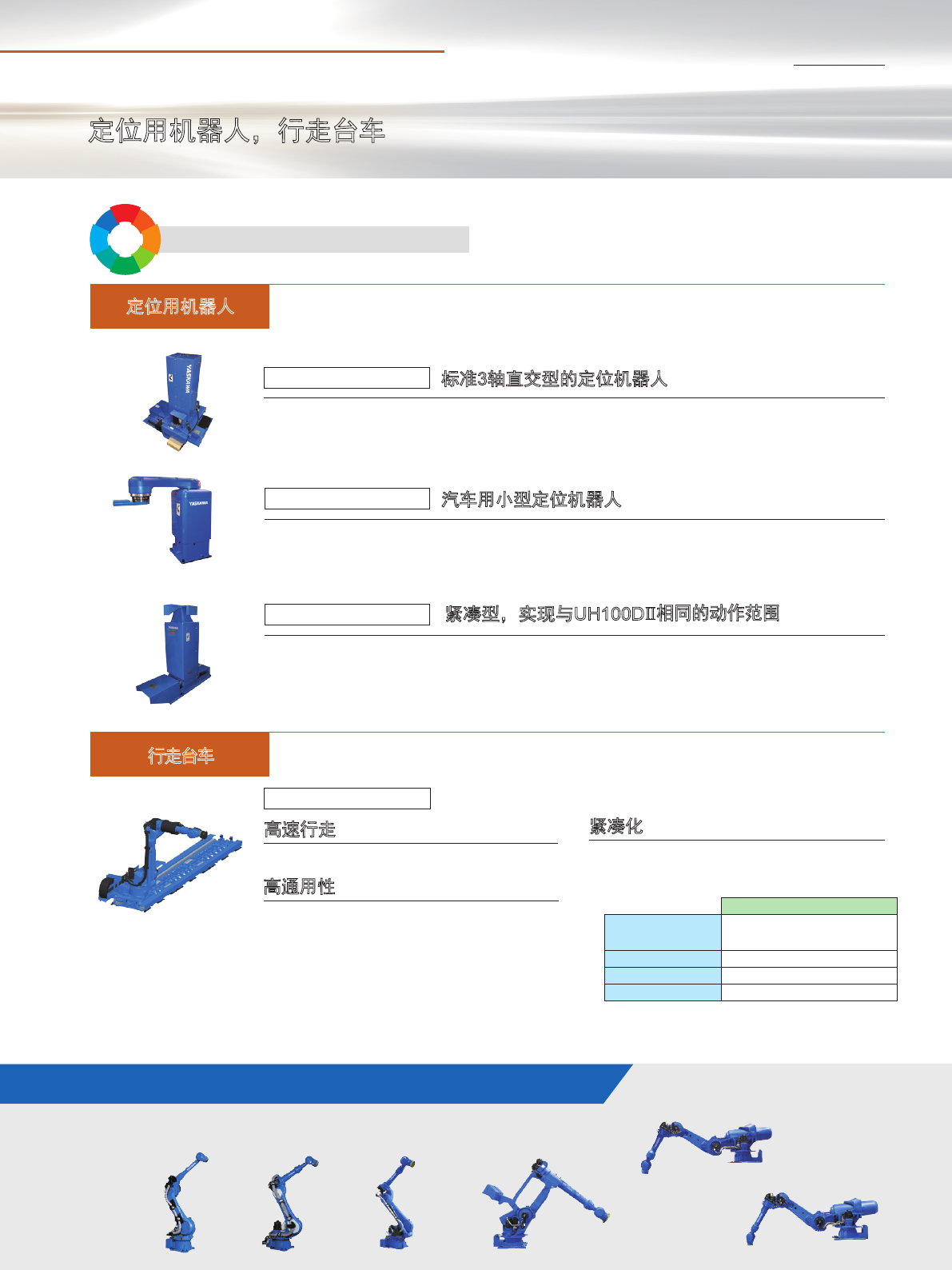
定位用机器人
MOTOBASE
-
TSA 系列
高速行走
高通用性
行走台车
1台机器人可用于更广的范围。
除了点焊机器人以外,还有中·大型搬运机器人一同构建生产线。
共通构建点焊生产线的搬运机器人
最大移动速度 1.5 m/s
标准3轴直交型的定位机器人
·
刚性的定位用机器人
·
由X, Y, Z三轴构成
汽车用小型定位机器人
·
以更小的占地空间大幅减少干涉领域
·
由升降轴和旋转2轴构成
MOTOMAN
-
MN100
·
更小的占地空间,实现与UH100D
·
由水平轴、升降轴和旋转1轴构成
通过将底座分割构造,可实现高自由度的布局。
可根据生产线选择长度,在有限的设置空间也能
设置工件,提高可加工性。
S
T
U
B
外部电缆由SLUR轴和BT轴2个模块,
2个设备模块(S和U)和2个接口模块
(B和T)构成。
可对应其他通用管线包。
例如:LEONI,QUICK等
【模块式管线包构成】
①
焊枪规格(伺服焊枪标准)
②
伺服焊枪 + 气动抓手
③
气动抓手
MOTOBASE
-
TSA
行程
+
1050 mm
1400 mm
250 mm
全长
行程
全幅
安装高度
紧凑化
以全长=行程+1050mm,全幅1400mm
(最小幅)的小型形状使设置空间紧凑化。
1 m ~ 10 m
(每米为单位可选)
提高设备安装、运行、维护效率!
客户需求
提高生产性!
【使用用途】
Sol ution
3
Solution
4
客户需求
紧凑型,实现与UH100D
相同的动作范围
同等的动作范围
自由对应各种工件,实现多品种少量生产线的效率化。
Ⅱ
Ⅱ
Ⅱ
Ⅱ
16
S o lution
4
MOTOMAN
-
SP Series
Sol uti on
3
MOTOMAN
-
SP Series
点焊用管线包
定位用机器人,行走台车
上腕部搭载模块
基座部
接口模块
旋转部搭载模块
电缆模块
(SLUR 轴)
电缆模块
(BT 轴)
工具部
接口模块
提供简易的模块式管线包构成
(部分机型除外*)
安川实现了电缆和搭载功能的模块化,提供简易且维护性高,功能性的新型管线包。
机器人及使用用途的选择
确认标准的模块构成
STEP
1
STEP
2
STEP
3
自定义模块
请选择使用的机器人和使用用途。
请确认对应机器人、使用用途的标准模块构成。
*
对应机型
:
MOTOMAN
-
SP100, SP100B, SP165, SP210
有关其他机型请向我司营业部门问询。
如需自定义
各模块可根据客户的规格进行定制。
请从可选模块中进行选择。
选定管线包的步骤
MOTOMAN
-
MSC35
MOTOMAN
-
UH100D
定位用机器人
MOTOBASE
-
TSA 系列
高速行走
高通用性
行走台车
1台机器人可用于更广的范围。
除了点焊机器人以外,还有中·大型搬运机器人一同构建生产线。
共通构建点焊生产线的搬运机器人
最大移动速度 1.5 m/s
标准3轴直交型的定位机器人
·
刚性的定位用机器人
·
由X, Y, Z三轴构成
汽车用小型定位机器人
·
以更小的占地空间大幅减少干涉领域
·
由升降轴和旋转2轴构成
MOTOMAN
-
MN100
·
更小的占地空间,实现与UH100D
·
由水平轴、升降轴和旋转1轴构成
通过将底座分割构造,可实现高自由度的布局。
可根据生产线选择长度,在有限的设置空间也能
设置工件,提高可加工性。
S
T
U
B
外部电缆由SLUR轴和BT轴2个模块,
2个设备模块(S和U)和2个接口模块
(B和T)构成。
可对应其他通用管线包。
例如:LEONI,QUICK等
【模块式管线包构成】
①
焊枪规格(伺服焊枪标准)
②
伺服焊枪 + 气动抓手
③
气动抓手
MOTOBASE
-
TSA
行程
+
1050 mm
1400 mm
250 mm
全长
行程
全幅
安装高度
紧凑化
以全长=行程+1050mm,全幅1400mm
(最小幅)的小型形状使设置空间紧凑化。
1 m ~ 10 m
(每米为单位可选)
提高设备安装、运行、维护效率!
客户需求
提高生产性!
【使用用途】
Sol ution
3
Solution
4
客户需求
紧凑型,实现与UH100D
相同的动作范围
同等的动作范围
自由对应各种工件,实现多品种少量生产线的效率化。
Ⅱ
Ⅱ
Ⅱ
Ⅱ
17