20201214142122.pdf - 第7页
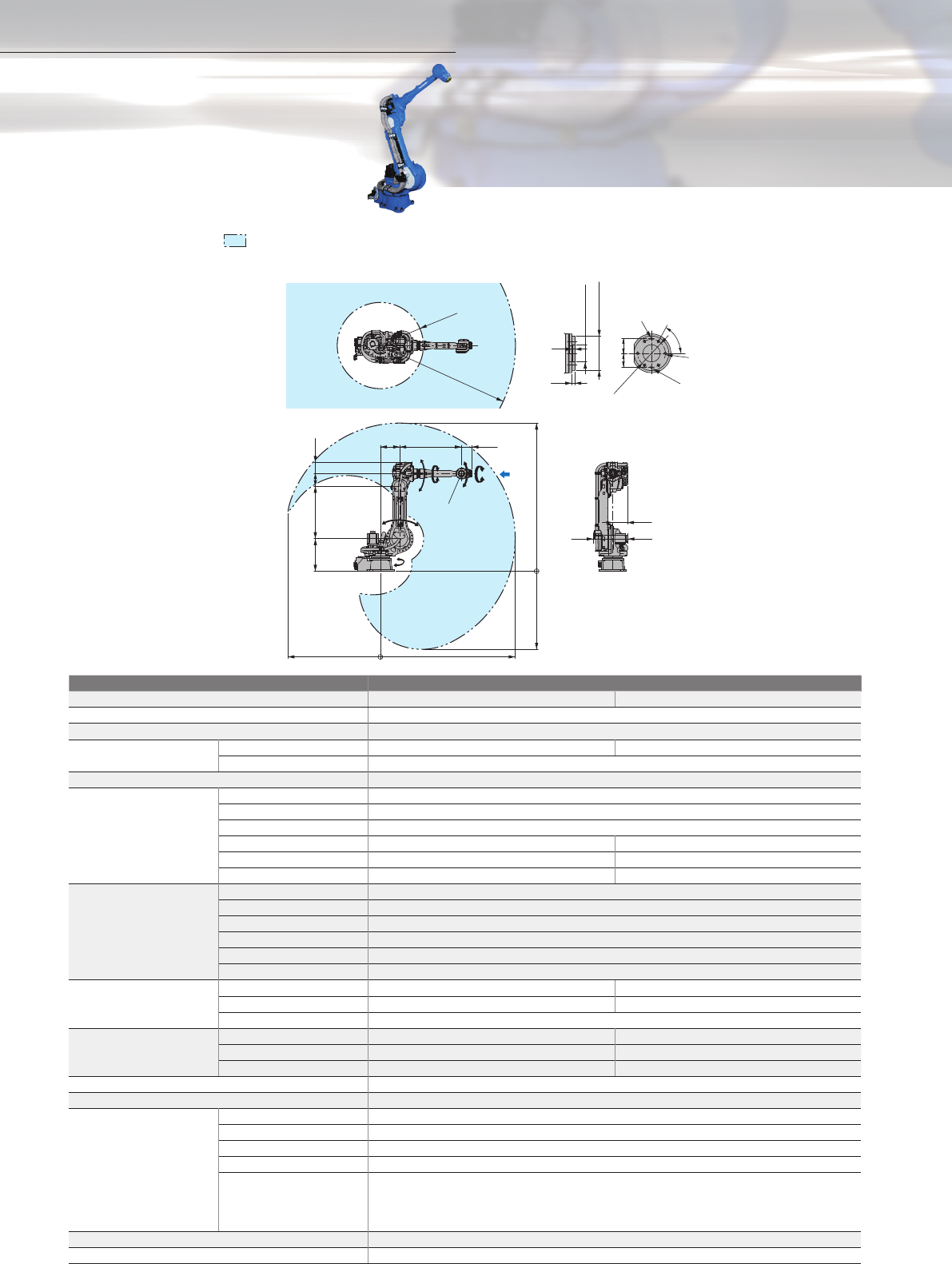
S o lution 1 M OT O MA N - SP Ser ie s SP 80 SP 100 SP 100 B M O T O M A N - S P S e r i es Spe cifications ■ 动作范围 单位 : mm : P 点动作范围 7 轴机器人 视角 A 42 40 Φ80 8 6 R 2236 R 718 视角 A P 点 R 2236 200 1020 320 540 435 435 235 E 0…

S o lution
1
MOTOMAN
-
SP Series
MOTOMAN-SP系列为客户提供了丰富的产品线
MOTOMAN
-
SP Series
以丰富的产品线智能地解决生产现场的困扰
设备宽度缩小
高密度配置
·
通过扩大有效动作范围,可实现更紧密的设备布局!
·
生产线长度缩短,循环时间缩短,节能效果
·
减少工数,提高多品种对应能力
新设备
SP100B
在L臂中间
追加E轴
■
动作范围比较
有效动作领域扩大
设置宽度缩小
有效动作领域
现有布局 1
焊接车身时的假定动作范围
现有布局 2
大型6轴机器人生产线
■
布局比较
SP
100B
实现7轴构造的 SP100B
现有机型
在丰富的SP系列产品线中,SP100B在L轴臂中间增加第7轴E轴,在实际应用中实现了有效动作领域的扩大。
客户需求
使设备紧凑!
扩大有效动作领域,增加了新的附加价值!
提高安装、运行、维护效率!
维护简单
·
更换机内电缆时无需连接电池即可保持原点数据
·
通过削减电缆·接头数量提高作业性
削减配线工数
·
供电电缆仅1根,实现配线工数的削减及省配线化。
安装
维护
运行
仅一根
供电电缆
削减工数!
大幅提高
安装、运行、维护
的效率!
减少
与周边设备
的干涉
Sol ution
1
6 轴
6
轴
中空手臂
置地式
置架式
MOTOMAN
-
SP80,
-
SP100,
-
SP165,
-
SP165
-
105,
-
SP210,
-
SP23
5
置地式
MOTOMAN
-
SP150R,
-
SP185R
MOTOMAN
-
SP110H,
-
SP180H,
-
SP225H
点焊用电缆可内置的中空手臂型。由于周边设备与电缆的干涉减少,
在线模拟示教作业更为容易。
7 轴
MOTOMAN
-
SP100B
相对于通常的6轴,通过在L轴和U轴间增加新的E轴,
使L臂长度可变,扩大可焊接范围。
最大臂展
(
mm
)
(kg)
*
*
:
200
150
100
50
0
20001500 2500 3000
250
(7轴)
●
SP100 / SP100B
SP165
●
SP185R
SP235
●
SP210
●
SP80
①
80
kg
②
2236 mm
①
210 kg
②
2702 mm
①
100 kg
②
2236 mm
①
235 kg
②
2710 mm
●
SP165-105
①
105 kg
②
3058 mm
●
SP235H
(中空手臂)
①
225 kg
②
2702 mm
SP110H
①
165 kg
②
2702
mm
SP150R
①
150 kg
②
3140 mm
①
110 kg
②
2044 mm
①
可搬质量
②
最大臂展
①
185 kg
②
3140 mm
SP180H
①
180 kg
②
2702 mm
产品线
可
搬
质
量
(中空手臂)
(中空手臂)
手腕前端安装有安川电机标准的电缆处理用法兰盘时的可搬质量。(除中空手臂型)
置地式
客户需求
提高布局自由度
中型6轴机器人
大型6轴机器人
中型、大型6轴机器人生产线
(置架式)
(置架式)
●
●
●
●
●
(
5
S o lution
1
MOTOMAN
-
SP Series
SP80
SP100 SP100B
M O T O M A N
-
S P S e r i es Specifications
■
动作范围 单位
:
mm
:
P点动作范围
7轴机器人
视角 A
4240
Φ80
8
6
R
2236
R
718
视角 A
P点
R
2236
2001020320
540 435 435
235
E
0
1469
2236
1336
0
2456
270
319
16
7
R
713
A
B
L
S
R
U
T
Φ100
Φ50
Φ6
(深10)
6×M8×P1.25
(深14)
Φ8
2×Φ10
Φ125
Φ31.5
Φ145
320 1020
0
P点
1536
2236
870
540
0
2456
1295
573
270
315
R
2236
200
7
16
R
740
视角 A
B
L
S
R
U
T
A
235
191
191
30
°
60
°
577
30
°
B
L
S
R
U
T
A
1295
540 870
210
191
320 1025 175
P
点
319
241
0
1534
2236
0
2456
252
(深14)
Φ125
6×M10×P1.5
(深15)
(深15)
6×M10×P1.5
(深15)
2×Φ10
(深15)
Φ31.5
Φ145
标准规格
SP80
电缆处理用法兰盘 无 有
型号
YR-1-06VX88-A00
构造 垂直多关节型(
6
自由度)
可搬质量
手腕部
88 kg 80 kg
U
臂上
10 kg
重复定位精度
*1 0.03 mm
动作范围
S
轴
(旋转)
-
180°
~
+180°
L
轴
(下腕) -
90°
~
+155°
U
轴
(上腕)
*2
-
80°
~
+ 90°
R
轴
(手腕旋转) -
360°
~
+360°
-
205°
~
+205°
B
轴
(手腕摆动) -
125°
~
+125°
-
120°
~
+120°
T
轴
(手腕回转) -
360°
~
+360°
-
180°
~
+180°
最大速度
S
轴
(旋转)
2.97 rad/s, 170°/s
L
轴
(下腕)
2.44 rad/s, 140°/s
U
轴
(上腕)
2.79 rad/s, 160°/s
R
轴(手腕旋转)
4.01 rad/s, 230°/s
B
轴
(手腕摆动)
4.01 rad/s, 230°/s
T
轴
(手腕回转)
6.11 rad/s, 350°/s
容许力矩
R
轴(手腕旋转)
408 N·m 389 N·m
B
轴(手腕摆动)
408 N·m 389 N·m
T
轴
(手腕回转)
206 N·m
容许惯性力矩
(
GD
2
/4
)
R
轴(手腕旋转)
30 kg·m
2
28 kg·m
2
B
轴(手腕摆动)
30 kg·m
2
28 kg·m
2
T
轴
(手腕回转)
11 kg·m
2
10.3 kg·m
2
本体质量
630 kg
保护等级 本体
: IP54,
手腕轴
: IP67
设置环境
温度
0 ˚C ~ +45 ˚C
湿度
20% ~ 80%RH (
无结露
)
振动加速度
4.9 m/s
2
(0.5 G)
以下
标高
1000 m
以下
其他
无引燃性或腐蚀性气体、液体
无水、油、粉尘
远离电气噪音源
无强磁场
电源容量
*3 4.0 kVA
设置方式
*4
置地式、倒装式、壁挂式、倾斜式
*1: ISO 9283
为基准。
*2:
记载的是自轴的动作范围而不是对地基准。
*3:
因用途、动作模式而异。
*4:
壁挂式、倾斜式设置时,
S
轴的动作会有限制。
6
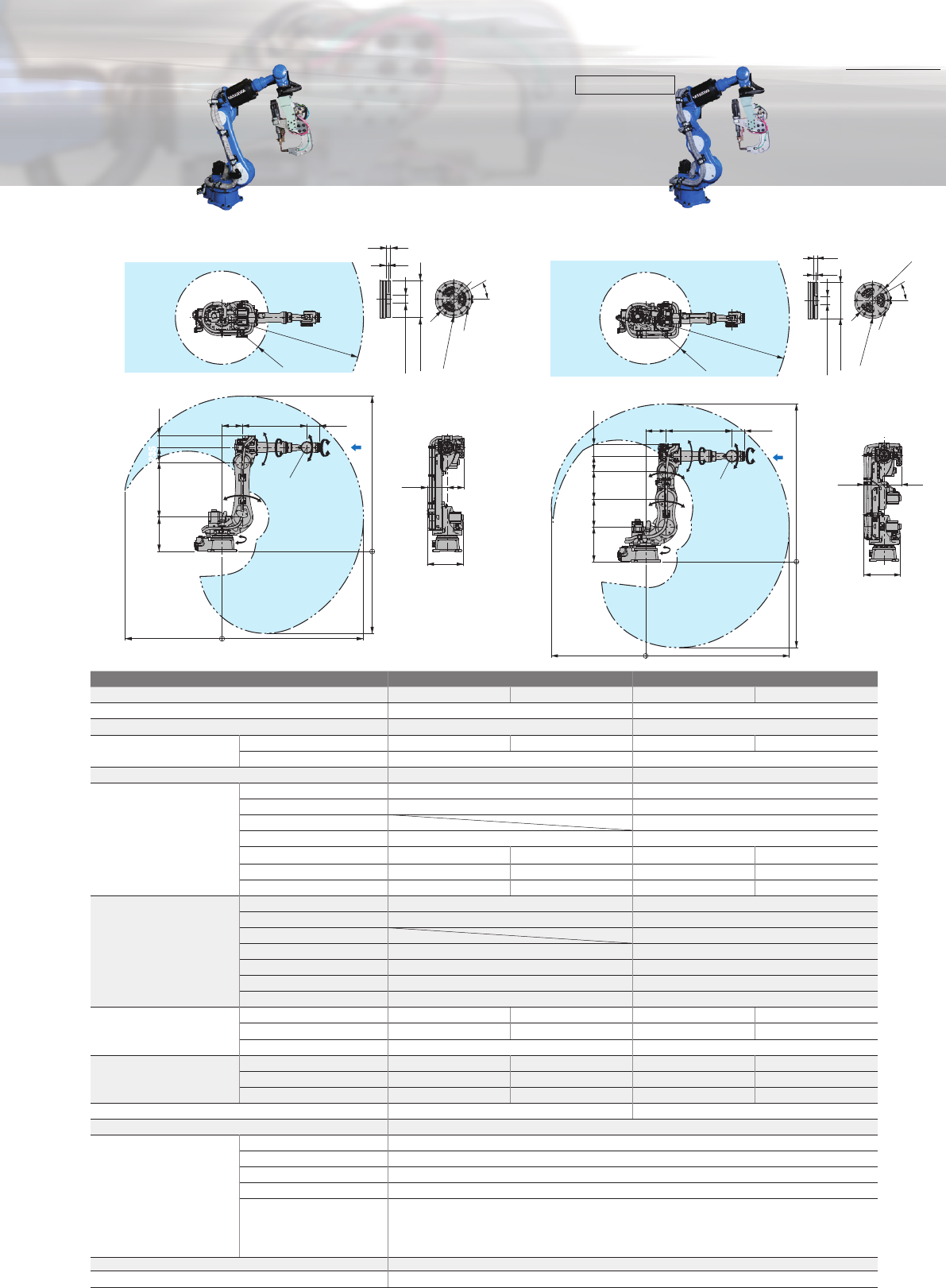
S o lution
1
MOTOMAN
-
SP Series
SP80
SP100 SP100B
M O T O M A N
-
S P S e r i es Specifications
■
动作范围 单位
:
mm
:
P点动作范围
7轴机器人
视角 A
4240
Φ80
8
6
R
2236
R
718
视角 A
P点
R
2236
2001020320
540 435 435
235
E
0
1469
2236
1336
0
2456
270
319
16
7
R
713
A
B
L
S
R
U
T
Φ100
Φ50
Φ6
(深10)
6×M8×P1.25
(深14)
Φ8
2×Φ10
Φ125
Φ31.5
Φ145
320 1020
0
P点
1536
2236
870
540
0
2456
1295
573
270
315
R
2236
200
7
16
R
740
视角 A
B
L
S
R
U
T
A
235
191
191
30
°
60
°
577
30
°
B
L
S
R
U
T
A
1295
540 870
210
191
320 1025 175
P
点
319
241
0
1534
2236
0
2456
252
(深14)
Φ125
6×M10×P1.5
(深15)
(深15)
6×M10×P1.5
(深15)
2×Φ10
(深15)
Φ31.5
Φ145
标准规格
SP100
SP100B
电缆处理用法兰盘
无 有 无 有
型号
YR-1-06VX110-A00 YR-1-07VXB110-A00
构造 垂直多关节型(
6
自由度) 垂直多关节型(
7
自由度)
可搬质量
手腕部
110 kg 100 kg 110 kg 100 kg
U
臂上
10 kg 10 kg
重复定位精度
*1 0.03 mm 0.04 mm
动作范囲
S
轴
(旋转)
-
180°
~
+180°
-
180°
~
+180°
L
轴
(下腕) -
90°
~
+155°
-
45°
~
+155°
U
轴
(上腕)
*2
-
45°
~
+120°
E
轴(中腕) -
80°
~
+ 90°
-
70°
~
+ 90°
R
轴(手腕旋转) -
360°
~
+360°
-
205°
~
+205°
-
360°
~
+360°
-
205°
~
+205°
B
轴
(手腕摆动) -
125°
~
+125°
-
120°
~
+120°
-
125°
~
+125°
-
120°
~
+120°
T
轴
(手腕回转) -
360°
~
+360°
-
205°
~
+205°
-
360°
~
+360°
-
205°
~
+205°
最大速度
S
轴
(旋转)
2.45 rad/s, 140°/s 2.45 rad/s, 140°/s
L
轴
(下腕)
1.92 rad/s, 110°/s 1.92 rad/s, 110°/s
U
轴
(上腕)
1.92 rad/s, 110°/s
E
轴(中腕)
2.27 rad/s, 130°/s 2.27 rad/s, 130°/s
R
轴(手腕旋转)
3.05 rad/s, 175°/s 3.05 rad/s, 175°/s
B
轴
(手腕摆动)
3.05 rad/s, 175°/s 3.05 rad/s, 175°/s
T
轴
(手腕回转)
4.44 rad/s, 255°/s 4.45 rad/s, 255°/s
容许力矩
R
轴(手腕旋转)
721 N·m 696 N·m 721 N·m 696 N·m
B
轴
(手腕摆动)
721 N·m 696 N·m 721 N·m 696 N·m
T
轴
(手腕回转)
294 N·m 294 N·m
容许惯性力矩
(
GD
2
/4
)
R
轴(手腕旋转)
60 kg·m
2
58 kg·m
2
60 kg·m
2
58 kg·m
2
B
轴
(手腕摆动)
60 kg·m
2
58 kg·m
2
60 kg·m
2
58 kg·m
2
T
轴
(手腕回转)
33.7 kg·m
2
33 kg·m
2
33.7 kg·m
2
33 kg·m
2
本体质量
660 kg 790 kg
保护等级 本体
: IP54,
手腕轴
: IP67
设置环境
温度
0 ˚C ~ +45 ˚C
湿度
20% ~ 80%RH (
无结露
)
振动加速度
4.9 m/s
2
(0.5 G)
以下
标高
1000 m
以下
其他
无引燃性或腐蚀性气体、液体
无水、油、粉尘
远离电气噪音源
无强磁场
电源容量
*3 5.0 kVA
设置方式 置地式
*1: ISO 9283
为基准
。
*2:
记载的是自轴的动作范囲而不是对地基准。
*3:
因用途、动作模式而异。
注
:
本表记载的是
SI
单位。
7