JM-20_QA表.pdf - 第72页
QA表 机种 1.拧松④的螺丝,调整①的前后位置。 1.让马达皮带轮的端面A和CENTER马达轴前端面B一致。 2.同步皮带的张力 12~16N 2.拧松IN、OUT马达固定到轨道架F的固定螺丝 和马达支架A的上部的按螺丝。 按螺丝拧仅之后皮带张力变强。 用由尼塔公司制音波式皮带张力计测定张力。 (Weight=002.5、Width=006.0,Span=0075) 1.决定同步皮带轮的轴方向位置 2.顺利地把马达驱动传导到传送皮带。…
QA表
机种
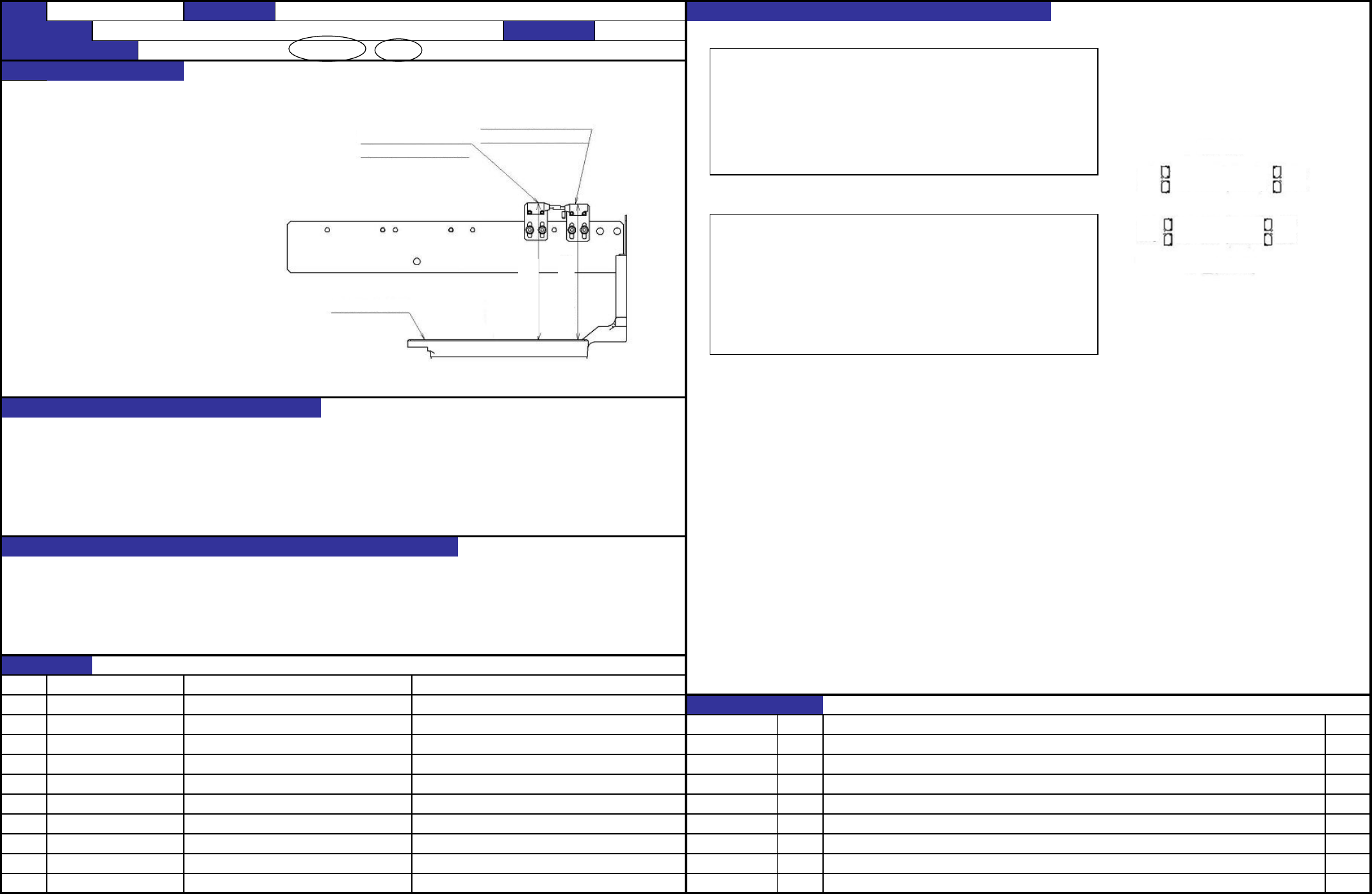
机械式台架上面~传感器上面尺寸
(左右之差在0.1mm以下)
・机器内侧
120.8±0.1mm
・机器外侧
121.8±0.1mm
检测送料器上盖是否打开松动。
检测送料器上部的贴装头动作范围内有无异物。
合准位置过高的情况:头部损坏
合准位置过低的情况:不能进行生产
NO
①
②
NO. 担当人
③
④
⑤
⑥
⑦
⑧
⑨
⑩
内容
'13.02.01 新設
日期
变更履历
货号 品名 有关质量特性
对象元件
功能作用(规格调整值的意义)
预想故障(应规格调整值不良而发生的故障)
2013/2/1
质量保证类别 功能・安全性 / 可靠性 / 安全性 / 商品特点
质量特性(规格调整值)
功能名称 送料器浮起传感器的高度(机械式专用) 编制日期
JM-20 装置名称 送料器浮起传感器 确认方法及调整方法(故障处理方法)
(送料器浮起(机械式)传感器(机器外侧)的调整工序)
①把散件送料器设定在送料器的左·中·右,确认传感器不OFF。
②把NF32送料器设定导与③同样的位置,打开上盖,在10mm以内的位置确认传感
器是否为OFF。
③把NF16送料器(有锁定·改造版)设定到与①同样的位置,用拨杆打开上盖,
确认传感器是否OFF。
④以上的操作之后,如果确认了散件·NF32·NF16,则操作结束。
(送料器浮起(机械式)传感器(机器内侧)的调整工序)
①把NF12(无锁定)设定在送料器的左·中·右,打开前盖,确认传感器OFF。※打
开前盖传感器也不OFF时,线安装位置的Y方向偏斜,请拧松传感器的安装螺丝,前后
移动调整。
②把NF16送料器(有锁定·改造版)设定到与①同样的位置,进行与①同样的操作,
确认窗阿尼OFF。※前盖打开,传感器也不OFF时,线安装位置的Y方向偏斜,请拧松
传感器安装螺丝,前后移动进行调整。
③以上的操作之后,如果确认了NF12·NF16,则操作结束。
送料器浮起传感器
送料器浮起传感器
(机械式,机器外侧)
(机械式,机器内侧)
机械式台架上面
121.8±0.1mm
120.8±
受光
投光
送料器浮起(机械式外侧)
送料器浮起(机械式内侧)
受光
投光
投光
投光
受光
前侧
后侧
送料器浮起(机械式外侧)
送料器浮起(机械式内侧)
受光
【10】-8
QA表
机种
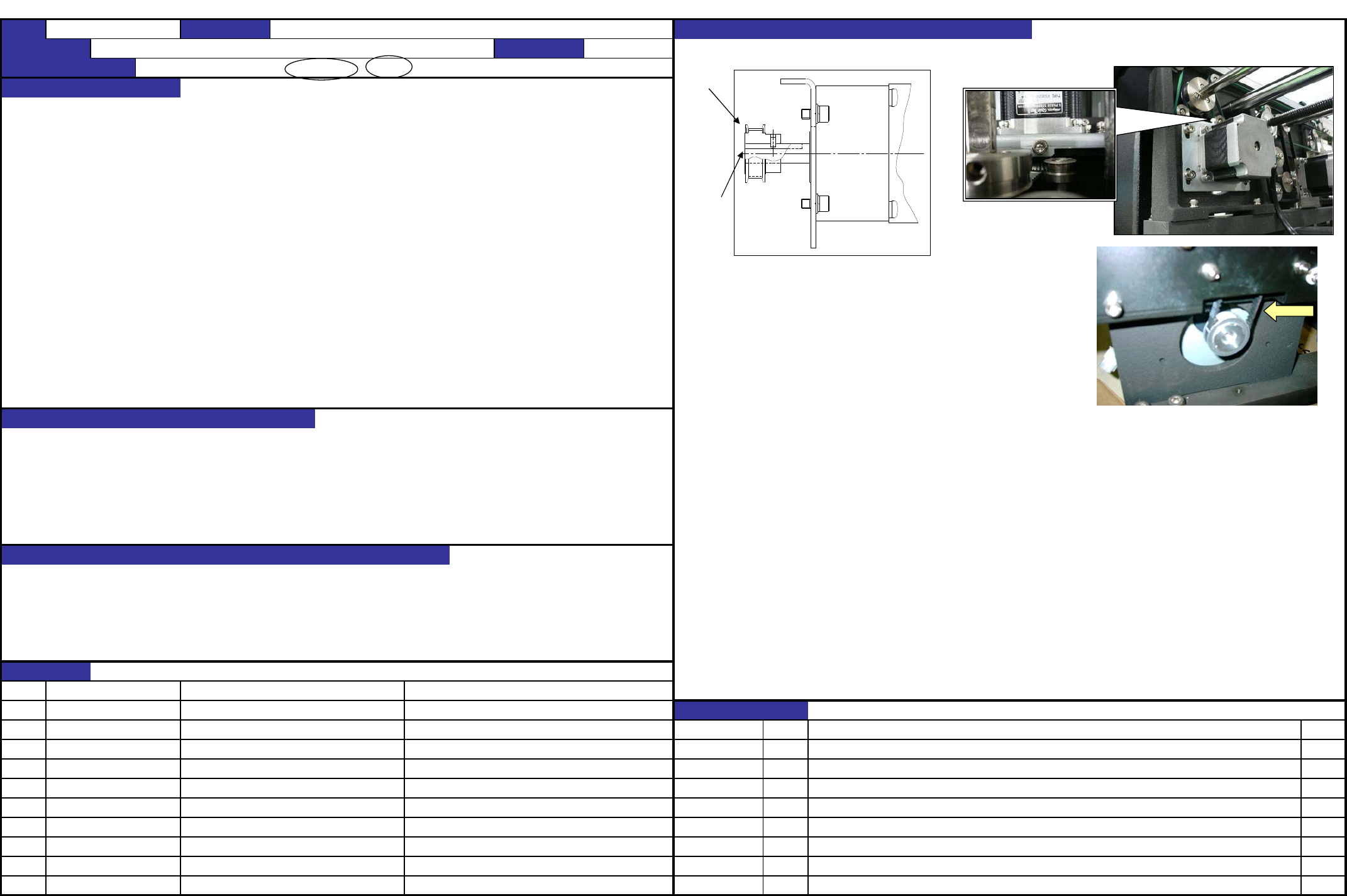
1.拧松④的螺丝,调整①的前后位置。
1.让马达皮带轮的端面A和CENTER马达轴前端面B一致。
2.同步皮带的张力
12~16N
2.拧松IN、OUT马达固定到轨道架F的固定螺丝
和马达支架A的上部的按螺丝。
按螺丝拧仅之后皮带张力变强。
用由尼塔公司制音波式皮带张力计测定张力。
(Weight=002.5、Width=006.0,Span=0075)
1.决定同步皮带轮的轴方向位置
2.顺利地把马达驱动传导到传送皮带。
1.同步皮带与其它元件相碰。
2.强时:发生异常声音,动作转矩大,马达可靠性低。
弱时:在传送动作发生异常。皮带轮的皮带跳出。
NO
①
② NO. 担当人
③
④
⑤
⑥
⑦
⑧
⑨
⑩
SM8030602TP SCREW
内容
40000870 MOTOR_PULLEY_C '13.02.01 新設
40046033 DRIVE_BELT_S_
日期
40137170 CONVEYOR_MOTOR_LR_ASM
变更履历
货号 品名 有关质量特性
对象元件
预想故障(应规格调整值不良而发生的故障)
质量保证类别 功能・安全性 / 可靠性 / 安全性 / 商品特点
质量特性(规格调整值)
功能作用(规格调整值的意义)
功能名称 顺利地传送基板(IN・OUT模式有关调整) 编制日期 2013/2/1
JM-20 装置名称 传送 确认方法及调整方法(故障处理方法)
A
B
【11】-1
QA表
机种
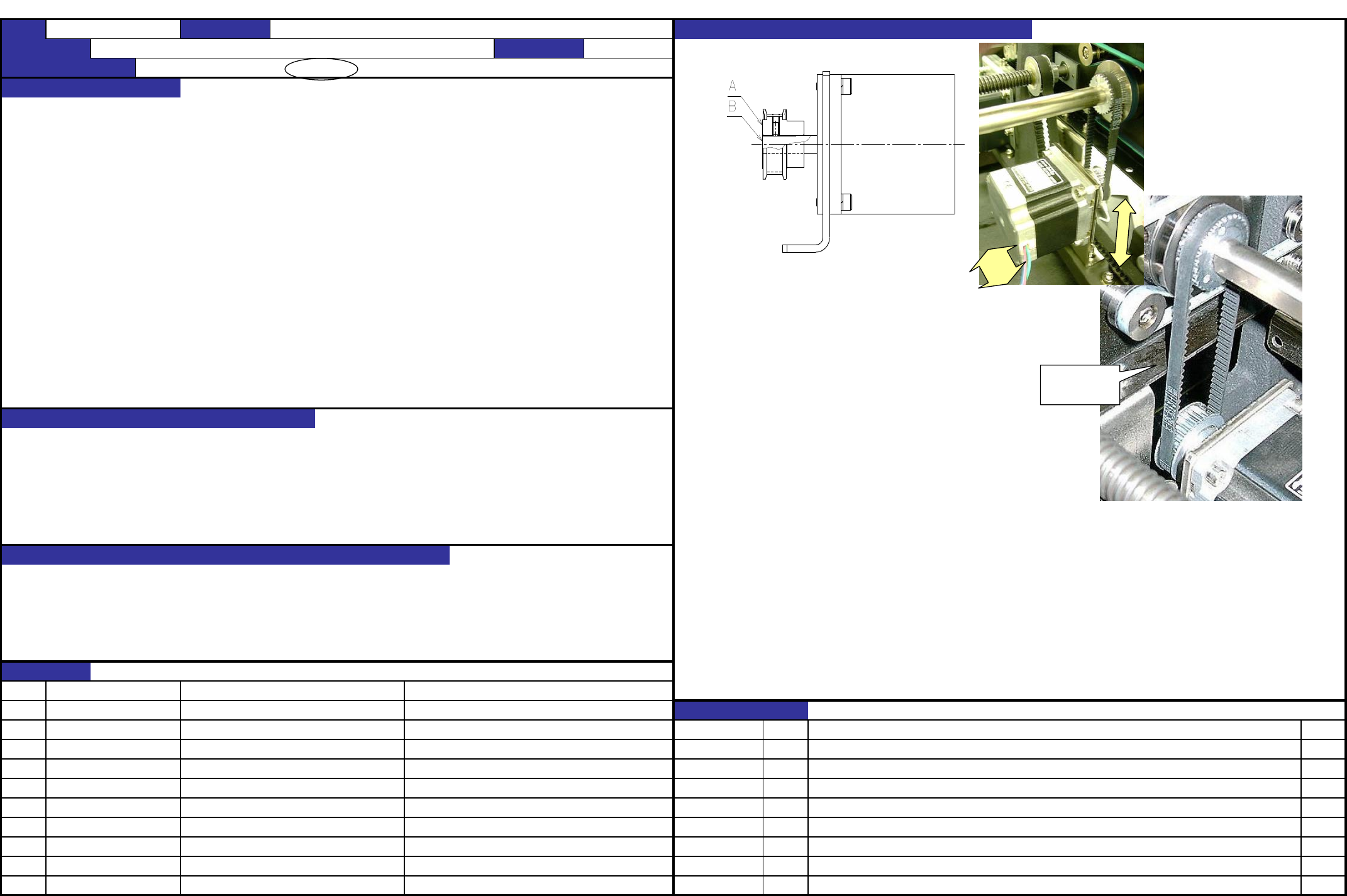
1.拧松④的螺丝,调整①的前后位置。
1.让马达皮带轮的端面和CENTER马达轴前端面一致。
2.同步皮带的张力
17.6~21.6N
2.拧松马达支架C固定螺丝,左右移动马达支架C。
拧松马达固定螺丝,上下移动CENTER马达组件。
请注意不要碰到其它零件,用上述2种方法测定皮带的
适当张力。
测定张力时,应使用由尼塔公司制的音波式皮带张力计。
(Weight=002.5、Widhth=006.0、Span=0093)
1.决定同步皮带轮的轴方向位置
2.顺利地把马达驱动传导到传送皮带。
1.同步皮带与其它元件相碰。
2.强时:发生异常声音,动作转矩大,马达可靠性低。
弱时:在传送动作发生异常。皮带轮的皮带跳出。
NO
①
② NO. 担当人
③
④
⑤
⑥
⑦
⑧
⑨
⑩
SM8030602TP SCREW
内容
40000870 MOTOR_PULLEY_C '13.02.01 新設
40001005 DRIVE_BELT_C
日期
40137169 CONVEYOR_MOTOR_C_ASM
变更履历
货号 品名 有关质量特性
对象元件
预想故障(应规格调整值不良而发生的故障)
质量保证类别 功能・安全性 / 可靠性 / 安全性 / 商品特点
质量特性(规格调整值)
功能作用(规格调整值的意义)
功能名称 顺利地传送基板(CENTER马达关系调整) 编制日期 2013/2/1
JM-20 装置名称 传送 确认方法及调整方法(故障处理方法)
張力計
測定位置
张力计
测定位置
【11】-2