SM321 Service-CHI.pdf - 第164页
Samsung Component Plac er SM321 Service Manu al 13. 完成组装后,确认 Ball spline Nut 周边有无污渍,利用真空清 扫仪清扫干净。如 果 Ball spline Nut 中流入污渍,影 像设备性能。 14. 需要执行以下 Calibration 作业。 Detect Z Offset 执行 ( 请参照 “3.2 ZOffsetCalibration “) N…
Head Module
4-59
Housing Ass’y。
8. 从下往上插入Ball spline,Ball spline上组装接头后把弹簧连接到slidu body。
9. 打开设备前面的Main Switch,启动PC。
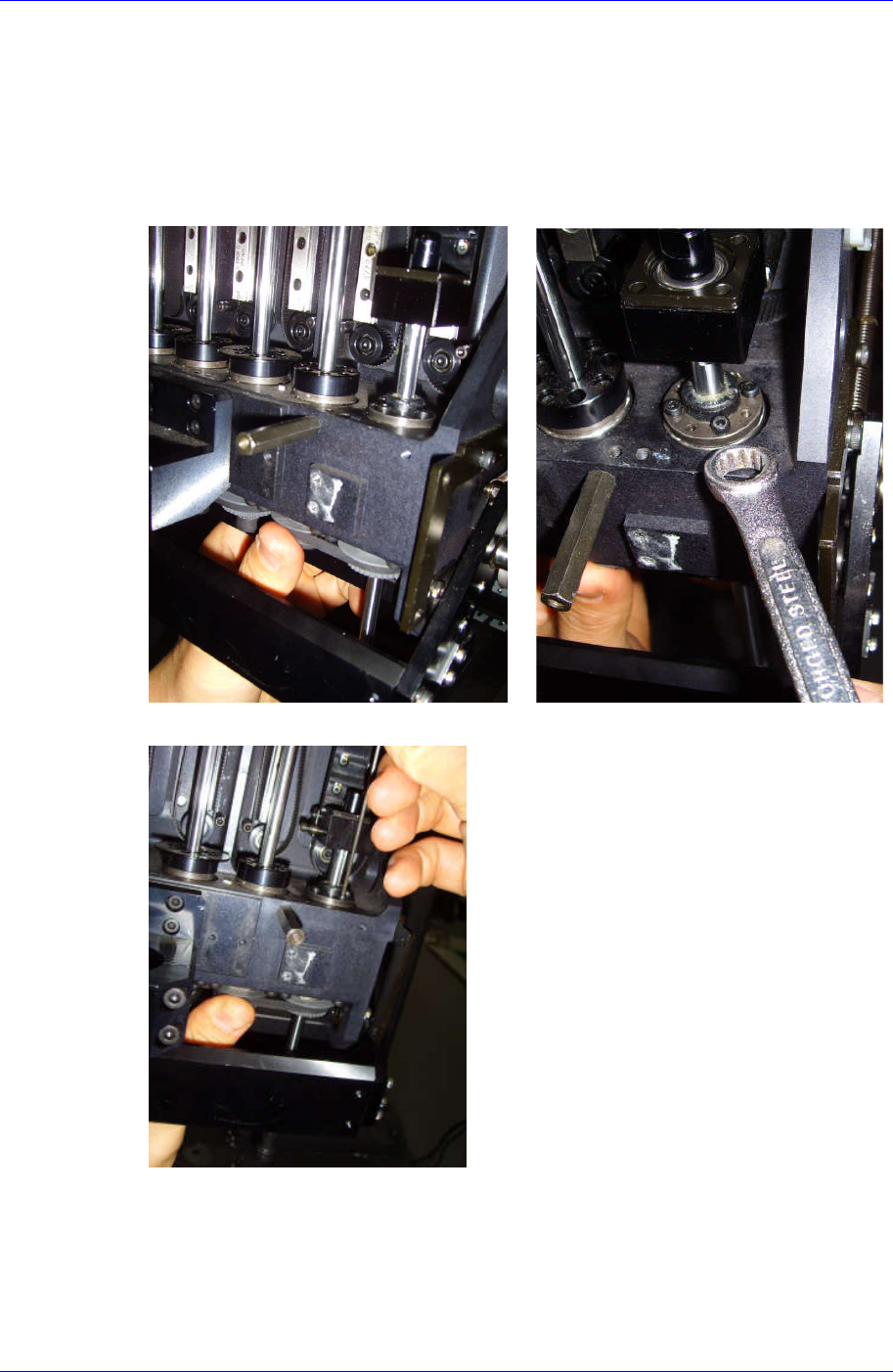
10. 利用示教框,慢慢旋转替换的头部,通过fly camera确认喷嘴座的偏心旋转程度
。 微调假组装的Ball splineNut直到喷嘴座不偏心旋转为止。 (可以如下图手动
旋转,肉眼确认偏心程度,但不建议这么做。)
11. 完成微细调整,请固定好固定螺丝。
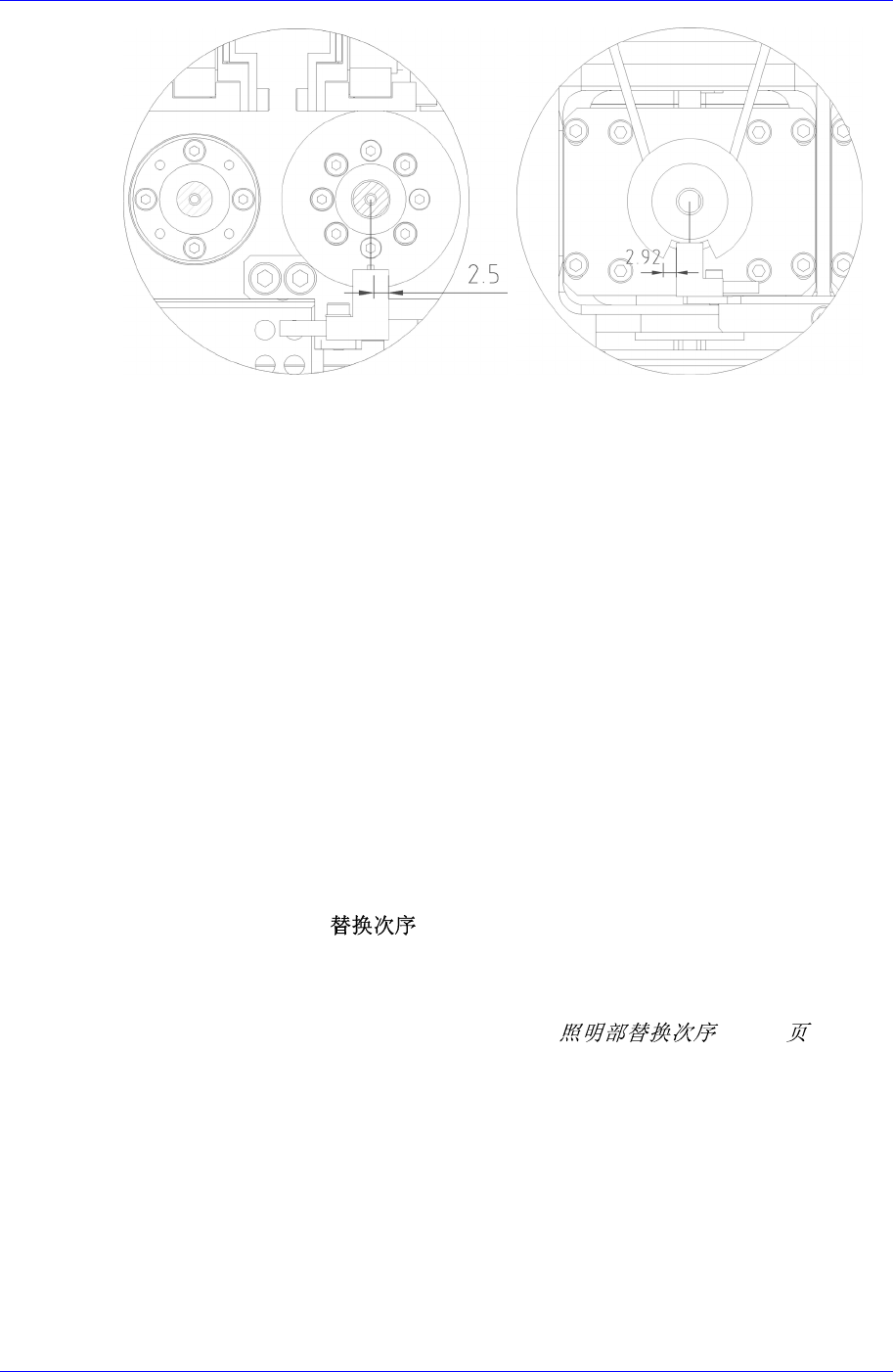
12. R轴传感器dog组装时,请参照下图的设置。
Samsung Component Placer SM321 Service Manual
13. 完成组装后,确认Ball spline Nut周边有无污渍,利用真空清扫仪清扫干净。如
果 Ball spline Nut中流入污渍,影像设备性能。
14. 需要执行以下 Calibration作业。
Detect Z Offset 执行 (请参照“3.2 ZOffsetCalibration “)
Nozzle Check 执行 (请参照“3.12 Nozzle Check “)
Nozzle Holder Check 执行 (请参照“3.2 ZOffsetCalibration “)
Head Offset Calibration 执行 (请参照“3.5 Head X, Y Offset Calibration“)
y camera Calibration 执 行 ( 请 参 照 “3.6 Fly Camera Scale & Rotation
Calibration“)
15. 完成校正后,为确认是否正常贴装部件,请执行测试。
Ass’y
1. 同样地执行到Ball spline 替换次序 No.1~No.3。
2. 利用扳手,从Ball Spline分离喷嘴夹具。
3. 为了作业方便请参照 ‘4.4.3 Flying Vision (4-19 )’,分离
Outer 照明部和Side照明部Modue。
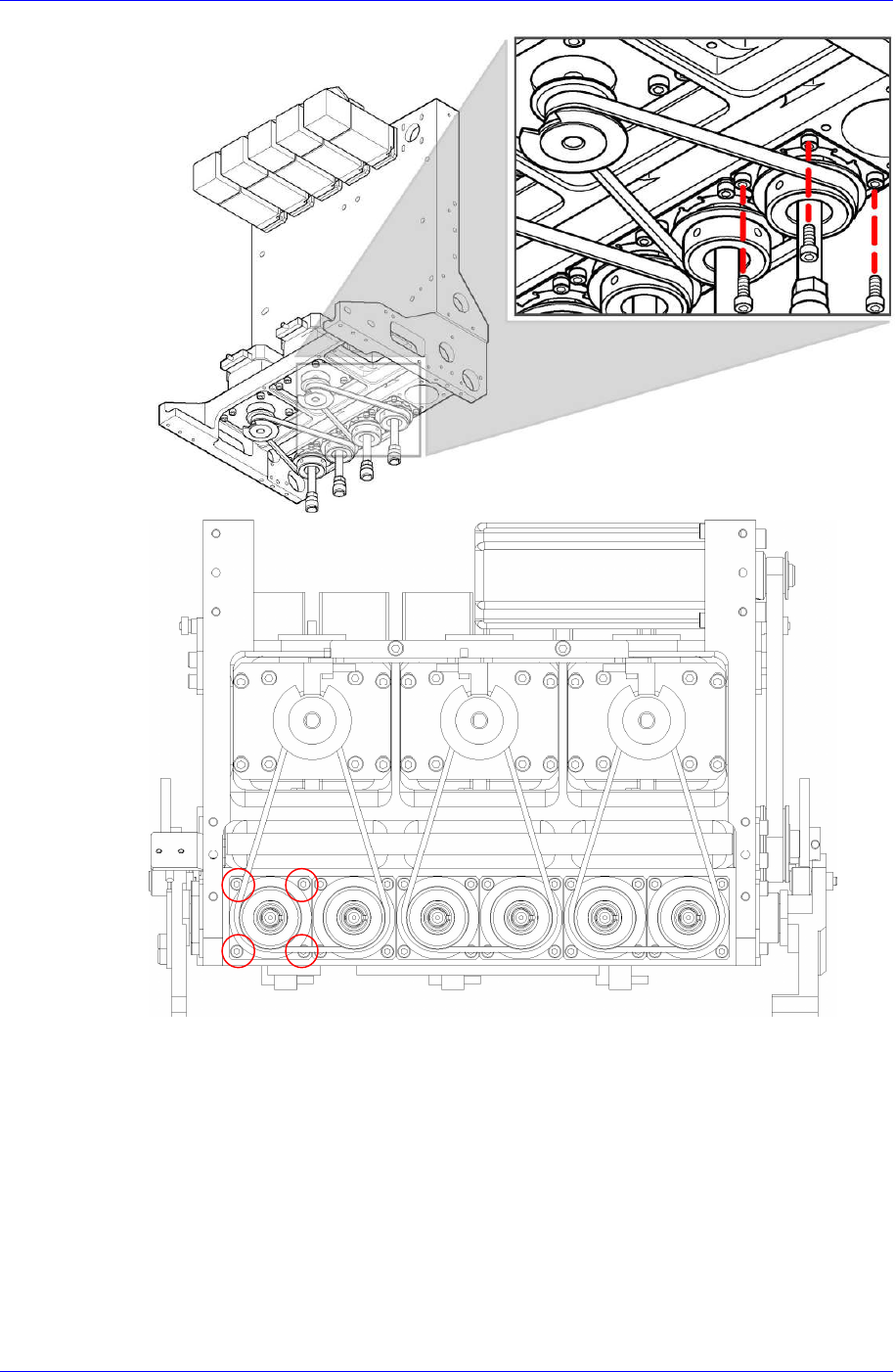
4. 从Head Body分离固定Bearing Plate的固定螺丝(M3-4个),分离 R轴同步齿型带
后,向下推动分离 Spindle Housing Ass’y。
R轴home sensor dog
(Top View)
R轴辅助传感器dog
(Bottom View)
Fl
Fly Cam Offset Calibration 执行 (请参照“3.7 Fly Camera & Head Spline
Offset Calibration“)
Spindle Housing
4-60
Head Module
4-61
5. 替换Spindle Housing Ass’y后,利用固定螺丝(M3-4个),把Spindle Housing Ass’y
固定到Bearing Plate。
6. 组装R轴同步齿型带时,请如下设置皮带张力。
请使用Unitta测定仪,在皮带的中央测定同步齿型带的张力。 (检查基准 -
297~370 Hz(9~14N))
没有测定仪的情况下,请参照邻近的其他R轴的同步齿型带进行设置。