CX-1_OPE.pdf - 第207页
第 4 章 生产程序制作 7) 释放检查 检查激光定心元件贴片后,元件是否仍附在吸嘴上。 检查元件释放会影响节拍速度(需要在停止状态下进行)。所以通常情况下,请将 初始值设置为“不进行” 。 8) 吸取位置校正( 激光) 是以激光定心的带状元件为对象,根据激光识 别结果来自动修正吸取位置偏差的功能。修正 的结果被反映到“吸取数据”的吸取坐标中。 如果选择吸取位置修正,则有时会因生产过程中吸取坐标变化而导致不 能从生产 中途进行同时吸取。…
第 4 章 生产程序制作
3) Z 项吸取偏移
设置在元件吸取时从吸取基准高度起要按入多深的数值。这项值仅对胶带元件有效,在
吸取数据“Z”的初始值基础上加减。
吸取坐标完成后,即使变更吸取偏差值 Z 项,并不进行重新计算吸取坐标。但
当元件数据变更后,把吸取数据的“供给”改为“自动选择”、并再次指定吸
取位置时,则会进行重新计算吸取坐标,并被反映到 Z 值里。
4) 元件废弃
当定心中发生识别错误,或引脚悬浮检查中发生错误时,设置将元件废弃或返回托盘。
表4-3-5-2 元件废弃位置一览表
元件废弃场所 内容
废弃 BOX 将发生错误的元件废弃到废弃盒中。
放回托盘 包装方式为托盘时可选择此方式。
IC 回收带 废弃到 IC 回收带(可选)中。只限图像定心元件才可选择。
元件保护
故障发生时,为了避免废弃引脚元件的引脚弯曲,这些贴
片头移动到操作员跟前会停下,此时,请手动从贴片头上
摘下元件。
5) 吸取位置校正(OCC)
为使贴片元件承受的负荷均匀,要在吸取前检测出元件中心。
对象元件:包装方式为托盘的元件。
元件外形尺寸、识别方法不同,吸取位置校正的实际效果也不尽相同。
元件尺寸(长边) 统一识别
(识别重心/识别4边)
分割识别
(识别2边)
~4mm ○ ×
4mm~5.5mm ○ ○
5.5mm~ × ○
○:吸取位置可校正 ×:吸取位置不可校正
将光标放在[示教]框,通过示教取得要进行吸取位置校正的元件的照明数据、识别时的窗口
尺寸(取得后显示“*”标记)。
6) 试打
与“贴片数据”中的设置相同,在生产画面(试打模式)中仅对选择了“执行”的元件进
行试打。
在元件数据上,可对这些贴片元件的所有贴片点,进行统一设置。
需要分别对每一贴片点进行个别设置时,请用贴片数据进行设置。
4-44
第 4 章 生产程序制作
7) 释放检查
检查激光定心元件贴片后,元件是否仍附在吸嘴上。
检查元件释放会影响节拍速度(需要在停止状态下进行)。所以通常情况下,请将
初始值设置为“不进行”。
8) 吸取位置校正(激光)
是以激光定心的带状元件为对象,根据激光识别结果来自动修正吸取位置偏差的功能。修正
的结果被反映到“吸取数据”的吸取坐标中。
如果选择吸取位置修正,则有时会因生产过程中吸取坐标变化而导致不能从生产
中途进行同时吸取。
9) 自动示教
只有包装方式为纸带、元件外形尺寸为0603~3216时才可设置为[执行]。除此以外,常
设状态为[不执行]。
设置为[执行]后,在跟踪吸取位置时自动示教。
10) 元件忽略
把元件忽略设置为“是”,则生产时指定的元件将被跳过不进行贴片。
指定跳过的元件贴片行,虽然生产时不进行贴片,但不列入未贴片列表中。
从数据库读入元件信息时,“元件忽略”数据被更改为“否”。
11) MTS 标记识别
使用MTS时,如果将吸取基准位置标记识别设为“进行”,则在拉出安置有设置元件的托盘时,
进行吸取基准位置标记的识别,修正吸取、元件返回等执行坐标。
如果选择“进行”,可提高吸取精度,但识别要花时间。
12) 元件层
设置元件层,排列同一贴片层内各元件的优先顺序。
这项设置仅在进行优化顺序的生产时有效。
此外,与贴片层不同,元件层不变为元件用尽暂停状态。
请右击一览表中所显示的层1(优先度高)到层7(优先度低),
进行选择设置。
4-45
第 4 章 生产程序制作
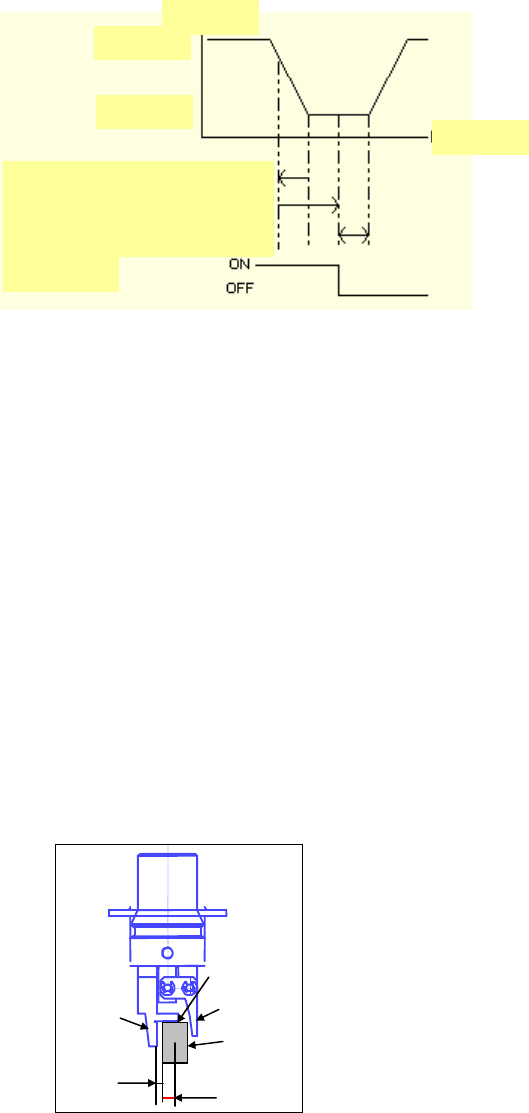
13) 贴片真空停止偏移量
在贴片 Z 轴下降、真空也处于 ON 时进行设置。
在通常情况下,不能由用户来变更贴片时的真空 OFF 控制(机器参数项目)。
但是,可采用在此项目中输入真空停止前的经过时间的方法,来变更真空 OFF 的时间
(单位: ms)。
将鼠标的光标放在编辑框上,会出现下列图形化提示窗口,显示真空停止时间、真空停止偏
移量、电磁阀 ON/OFF 状态。
移动高度
贴片高度
时间
真空停止时机 15ms(固定值)
真空停止偏移量 200ms
真空切断等待时间 5ms(固定值)
真空电磁阀
Z 轴高度
真空停止偏移量的提示
* 真空停止时机、真空切断等待时间不能变更。
14) 夹持吸嘴数据
是用于设置夹持吸嘴(选购件)的项目。
① 抓取位置: “Y”项,元件中心与夹持吸嘴固定侧手臂抓取面中心的偏移值(见图
1a),输入负数(-a)。但“X”项只可输入 0,不可输入其他数据。
② 水平间隙∶ 夹持吸嘴固定侧手臂抓取面与元件之间的间隙(见图 1b),输入负数
(-b)。因吸嘴型号、吸嘴方向不同,移动方向不同,务请注意。
通常设置自动输入的默认值。
③ 吸取时吸嘴方向∶ 是指元件以0度供应、吸取时的吸嘴方向。请指定0度、90 度、180
度、270 度中的一项。
④ 调整吸取高度: 吸取时吸取高度的偏移值(c 与元件上底面之间的间隙)。
通常,为了保持元件的水平,设为-0.5mm。
a
元件
c
摇 臂
固定臂
b
图1
4-46