SI-F209_Manual(J)JPG_rev1.pdf - 第142页
Y 軸 Z 相合わせ HLF-20402-01 Y 軸 Z 相合わせ SHEET 2/3 5 ORG センサのドグ検出位置を測定し ます。 1. ダイヤルゲージの目盛りを読みます。 この値が ORG センサを感知してから停止するま での現状の Y 軸の移動量です。 例: 9.5 mm 6 現状の移動量と Z 相設定移動量「 5 mm 」との差を求めます。 例:現状の移動量 (9.5 mm) - Z 相設定移動量 (5 mm) =調整値 …
Y 軸 Z 相合わせ
HLF-20402-01
Y 軸 Z 相合わせ
SHEET
1/3
Y 軸 Z 相合わせ
ここでは原点復帰を行った際に、ORG センサがドグを検出し
てから Y- CCW センサ側(前側)へ 5 ±2 mm 移動した位置(Z
相設定位置)でモータが停止するように Z 相を位置調整する
手順について説明します。
[作業手順]
1 操作パネルの ORG ボタンを押します。
原点復帰が行われます。
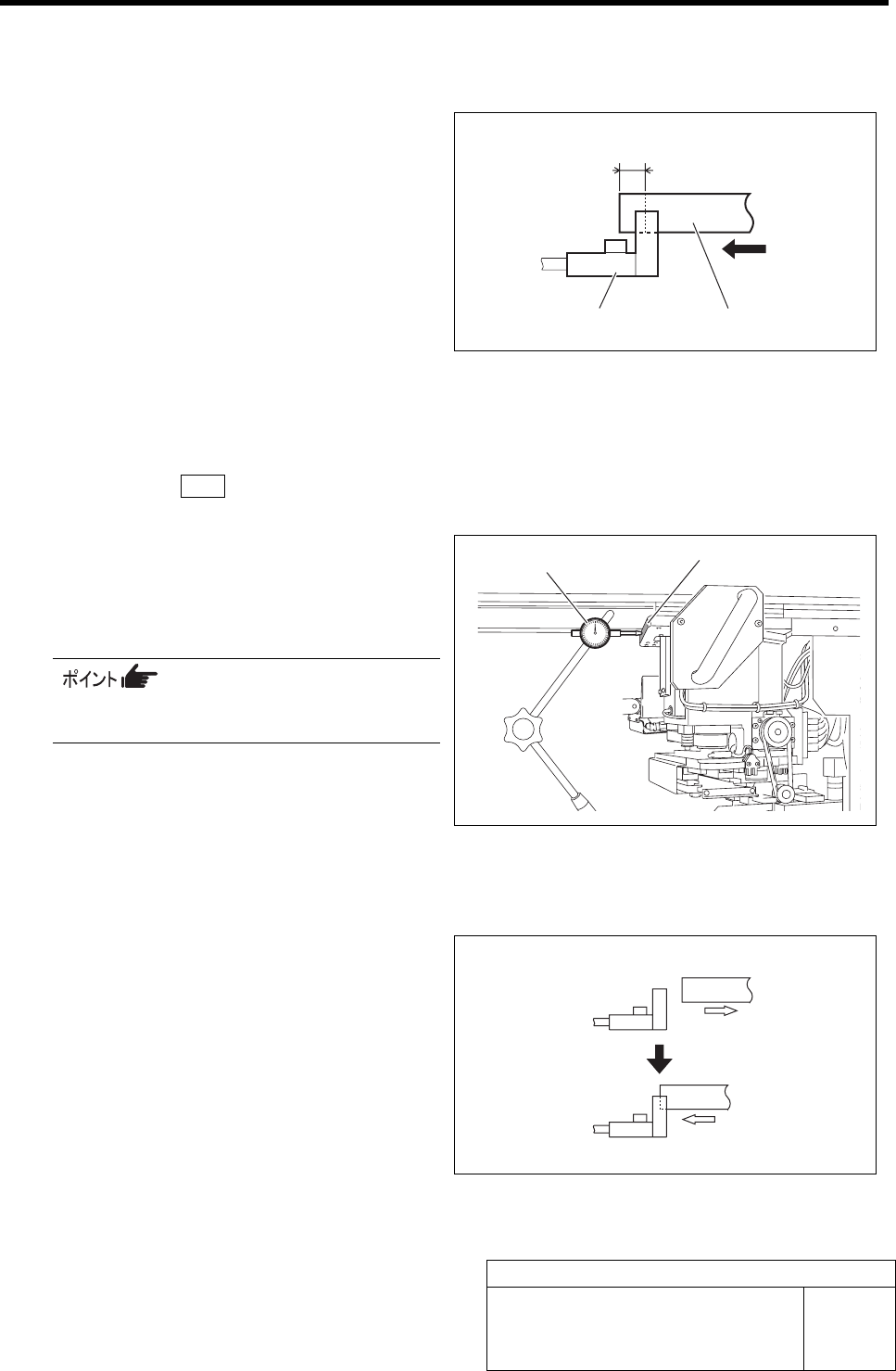
2 現状の Z 相位置にダイヤルゲージをセットし
ます。
1. ダイヤルゲージを Y 軸可動部端面にセット
します。
測定範囲が 7mm 以上のダイヤルゲージを使用
してください。
2. ダイヤルゲージの目盛りを“0”に合わせ
ます。
3 非常停止スイッチを押します。
サーボが OFF されます。
4 ORG センサの LED が消灯から点灯に変わる
境界位置で Y 軸を止めます。
1. ORG センサからドグが離れる位置まで Y 軸
ボールネジを手で回して、Y 軸を前方に移
動させます。
2. Y 軸を後方に少しずつ動かし、ORG センサ
の LED が消灯から点灯に変わる境界位置
で停止させます。
ORG センサ ドグ
5 mm
消灯
点灯
Y 軸可動部端面
ダイヤルゲージ
Y 軸 Z 相合わせ
HLF-20402-01
Y 軸 Z 相合わせ
SHEET
2/3
5 ORG センサのドグ検出位置を測定します。
1. ダイヤルゲージの目盛りを読みます。
この値が ORG センサを感知してから停止するま
での現状の Y 軸の移動量です。
例:9.5 mm
6 現状の移動量と Z 相設定移動量「5 mm」との差を求めます。
例:現状の移動量(9.5 mm)-Z 相設定移動量(5 mm)=調整値(4.5 mm)
この例では、設定移動量「5 mm」に対し、現状の移動量が 9.5 mm と大きいため、4.5 mm ほど移動量を小さくする調整
が必要となります。
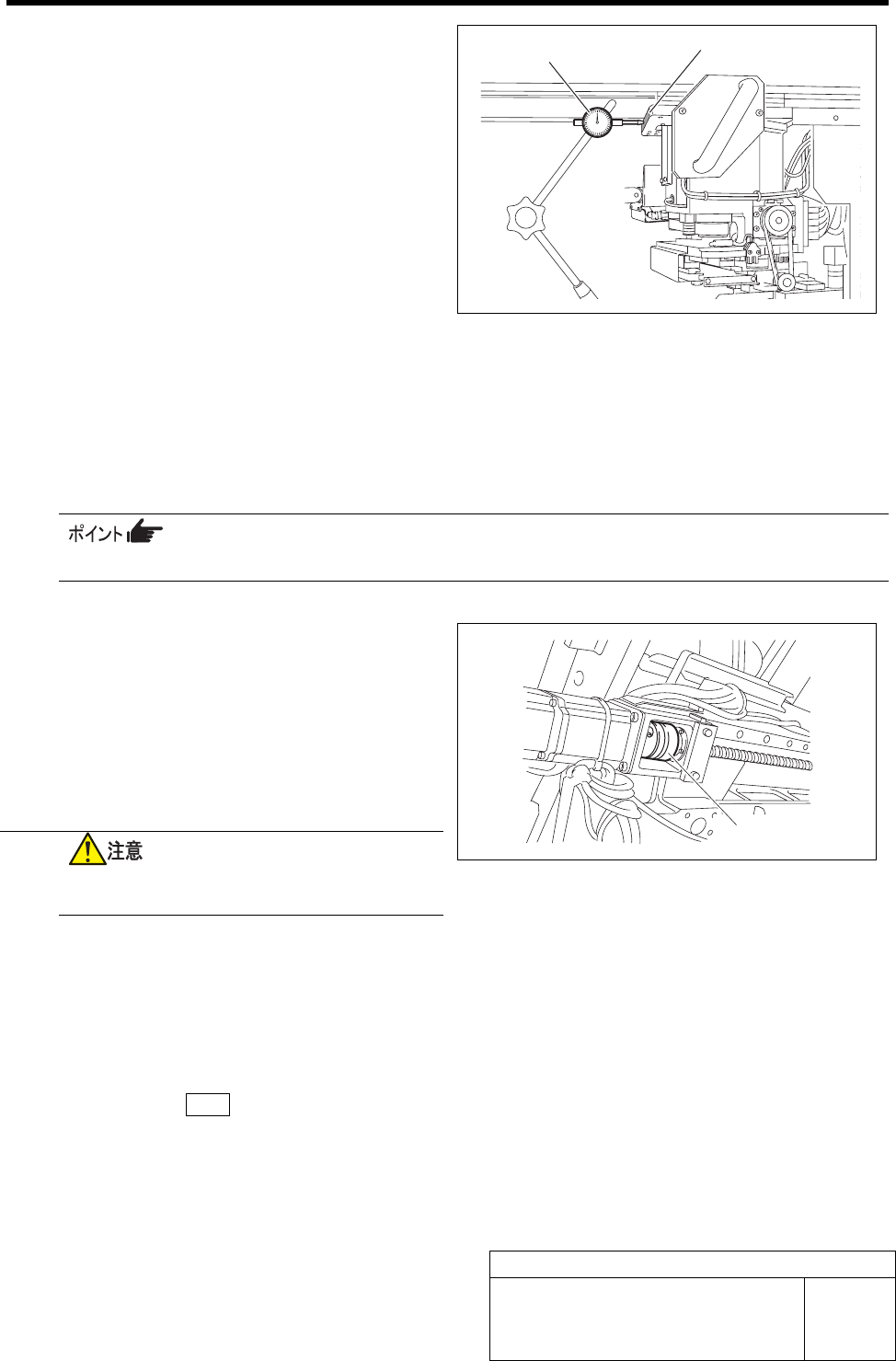
7 Z 相設定位置の調整を行います。
モータとボールネジの位置関係を調整することで、Z 相設定位置の調整を行います。
1. カップリングのビスを緩めるための作業スペ
ースを確保するために、ヘッド部を前方へ
移動させます。
2. カップリングのボールネジ側のビス M4 を緩
めます。
3. ダイヤルゲージの目盛りが「5.0 mm」にな
るように Y 軸を移動させます。
Y 軸を動かすときは、カップリングが動かないよ
うにしてください。
4. カップリングのボールネジ側ビス M4 をトルクドライバーで締め付けます。
締め付けトルク:3.4 N・m
8 ダイヤルゲージを取り外します。
9 非常停止スイッチを矢印方向に回し、非常停止状態を解除します。
10 操作パネルの ORG ボタンを押し、原点復帰を行います。
Y 軸可動部端面
ダイヤルゲージ
カップリング

Y 軸 Z 相合わせ
HLF-20402-01
Y 軸 Z 相合わせ
SHEET
3/3
11 Z 相設定位置を確認します。
1. 再度、Y 軸可動部にダイヤルゲージをセットします。
2. Y 軸ボールネジを手で回し、ORG センサのドグ検出位置で Y 軸を停止させます。
3. このときのダイヤルゲージの目盛りが「5±2 mm」になっていることを確認します。
許容誤差:±2 mm (目標:±1 mm)
12 ダイヤルゲージを取り外します。