N7201A643C.pdf - 第542页
EJM8D C - MB - 13E - 00 NPM - DX 单元设定 B 1 1 2 A 动作参数的设定 1 13 -1-2 -1 A B 工程师手册 13 - 1 - 2 1 2 设定系统动作的 参数。 选择动作参数的种类 ■设定尺寸时 ■设定时间时 ■判定时 ■设定为本公司 的标准规格时 ( 被初始化 ) 动作参数的设定状态 显示前后画面。 修改画面上需要修改的数据 ●轻触画面,显 示输入画面。
EJM8DC-MB-13E-00
NPM-DX
13-1-1-10
设定的内容 9
13-1-1-12
No.
项目名称 功能为 [ON] 时
1
用高度传感器计测
(AF)
用AF的高度计测传感器计测基板上平面的高度。
2
用高度传感器计测
(AR)
用AR的高度计测传感器计测基板上平面的高度。
3
用高度传感器计测
(BF)
用BF的高度计测传感器计测基板上平面的高度。
4
用高度传感器计测
(BR)
用BR的高度计测传感器计测基板上平面的高度。
●初始设定: ON
No.
项目名称 功能为 [ON] 时
1
多功能照相机识别
照相机高度计测
用多功能识别照相机进行元件厚度以及元件形状的计测。
●初始设定: ON
■识别相机 (中止)
■高度传感器 (中止)
EJM8DC-MB-13E-00
NPM-DX
单元设定
B
1 1 2
A
动作参数的设定 1
13-1-2-1
A
B
工程师手册
13-1-2
1
2
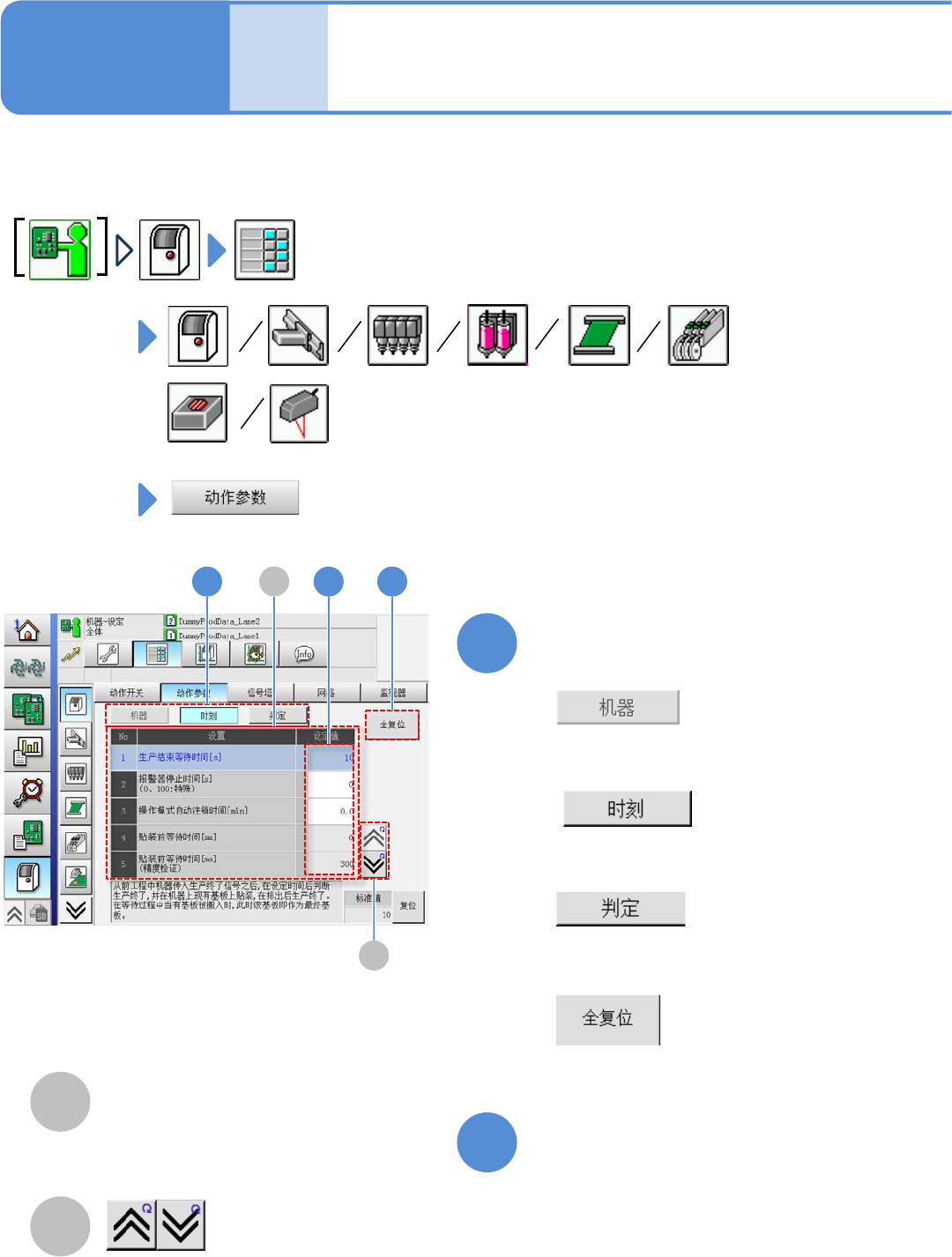
设定系统动作的参数。
选择动作参数的种类
■设定尺寸时
■设定时间时
■判定时
■设定为本公司的标准规格时
(被初始化)
动作参数的设定状态
显示前后画面。
修改画面上需要修改的数据
●轻触画面,显示输入画面。
EJM8DC-MB-13E-00
NPM-DX
13-1-2-2
设定的内容 1
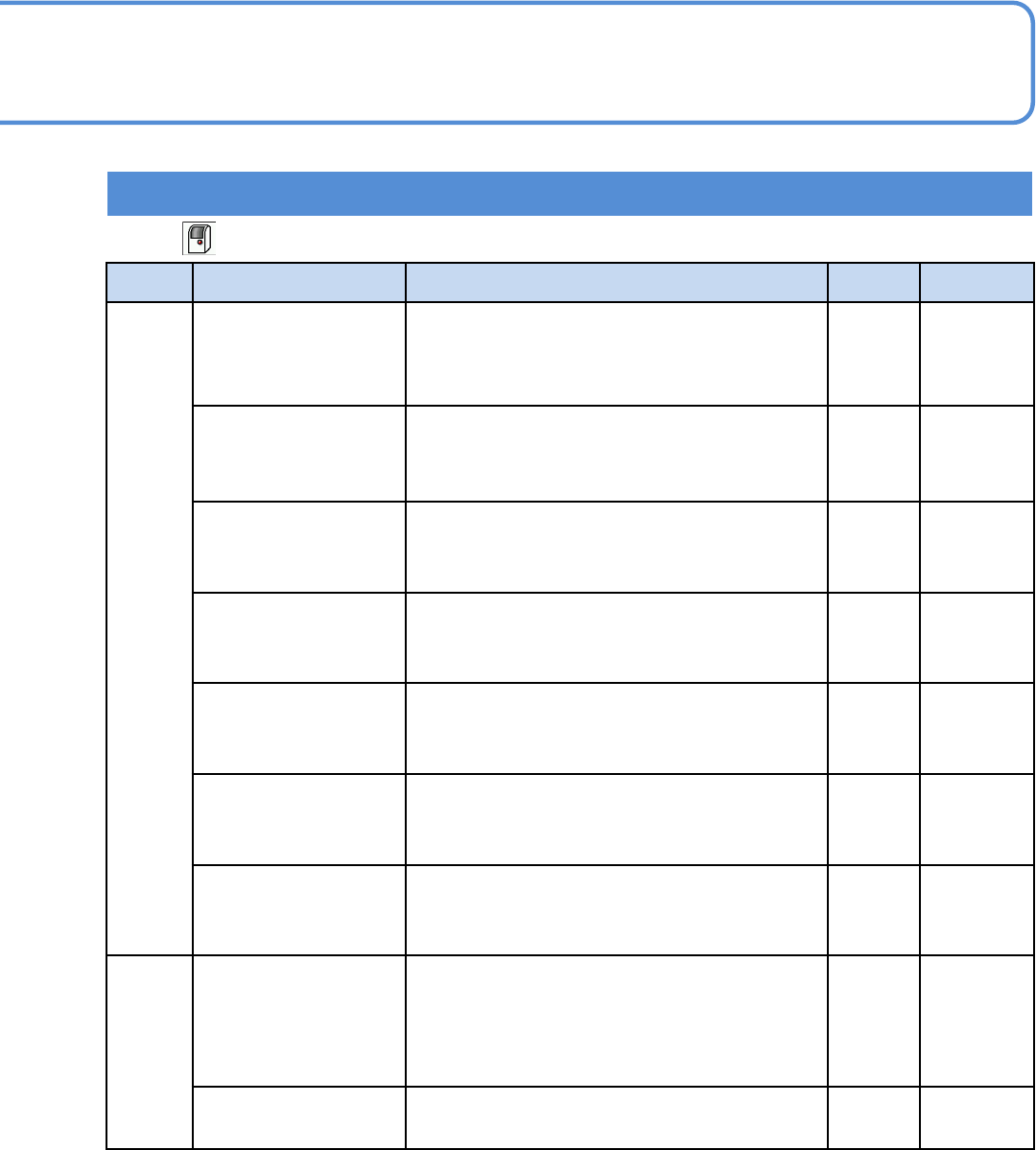
■全体
种类 项目名称 内容 初始值 设定范围
时间
生产结束
等待时间[s]
输入生产结束信号后经过所设定的时间、或者
搬入基板的时候,机器会判断为生产结束,将
设备内的所有基板搬出后,会结束自动运转。
10
0 ~ 60
报警器停止时间[s]
(0, 100:特殊)
一旦经过在此设定的时间,报警器会自动停止
鸣响。
●当设定为 ‘0’ 时,一直鸣响到按下报警器的停
止键为止。当设定为 ‘100’ 时,不会停止。
0
0 ~ 100
操作模式的自动注销
时间[min]
在设定的时间内不进行操作时,会自动变更为
操作员模式。(除生产中或校准中以外)
●当设定为 ‘0’ 时,不会切换操作模式。
0.0
0.0 ~ 60.0
实装前等待时间 [ms]
移动到实装点后,按照设定的时间等待后执行实
装动作。
0.0
0 ~ 9999
校正画像确认时间 [s]
如果在贴装坐标校正画面的图像确认下,使用了
‘自动供给模式’ 时,每经过在这里所设定的
时间,贴装头即会自动移动到下一个贴装点。
1
1 ~ 10
设备操作结束条件 [s]
(选购件)
设备没有操作的时间超过所设定的时间时,远程
用户将取得设备的操作权。
30.0
0 ~ 600
远程操作优先
的超时时间 [s]
(选购件)
发生对象的错误时,远程优先的状态所持续的时
间。
30.0
0 ~ 600
判定
运转率图标最高值[%]
定义状况监视器画面内的人脸图标的运转率。
(例) 当输入60的时候,以15/30/45/60作为阈值,
图标显示将会切换。
(→『操作手册』 P. 3-2-1 ‘生产中、停止中的确
认方法’)
80
0 ~ 100
精度判定值Cpk 变更精度判断值的Cpk值。
1
0.01 ~
3.00