SER01989020_YV112III Service_J.pdf - 第22页
第3 章 調 整 はじめに 3-3 1. マシン構成モード ..................................................... ............................................................... ......................................................... 3-5 2. マシンデータ編…
2-
11
SER01989020
点検・保守
第
2
章
3
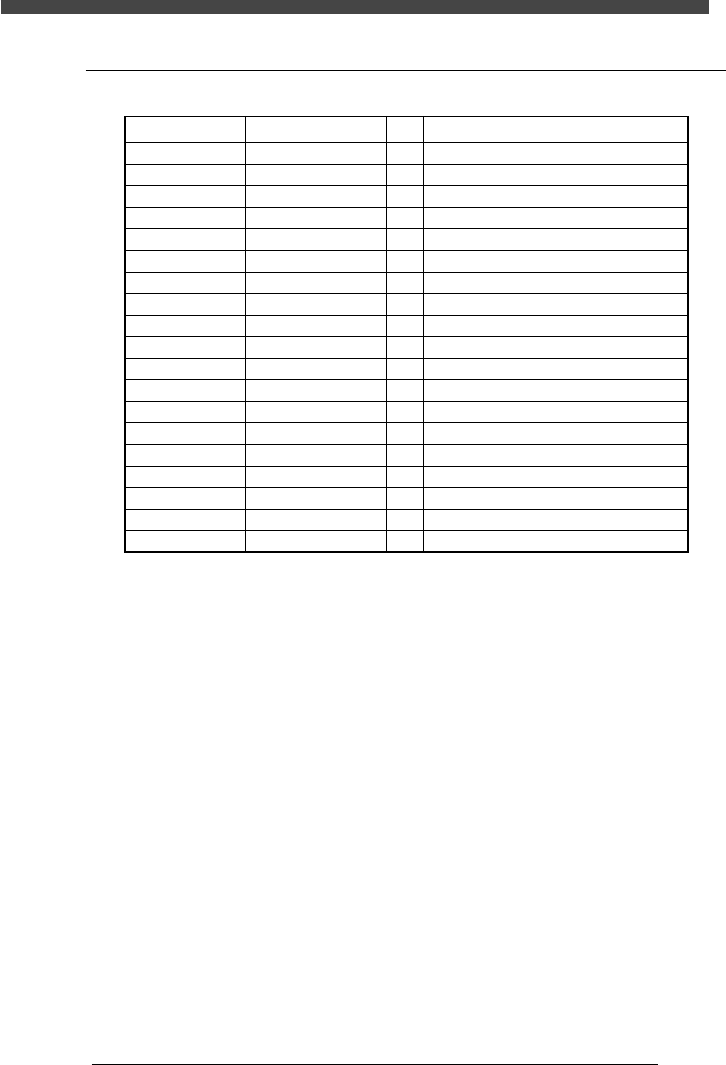
3.3 保守推奨品リスト
40142007-00
KH4-M655F-20X
KH1-M655F-00X
KM1-M7165-00X
KJ2-M7158-00X
KG2-M7181-00X
KM5-M7121-00X
KM5-M7122-00X
KM5-M7107-00X
KM5-M7107-B0X
KG2-M8596-00X
KL0-M655G-10X
KL0-M655G-00X
90K50-8A1C4X
90K50-4W034M
90K50-871C4Y
90K50-4W034R
90K50-4W034Z
90K50-4W034W
90K50-4W032W
SENSOR, 1-3
SENSOR, 1-3
SENSOR HEAD
SENSOR HEAD
PACKIN, MYA4
RETURN SPRING
CYLINDER
SPLINE HEAD UNIT
SPLINE HE. U. B. : SPARE
AIR PRESS. METER
SENSOR, 1-4
SENSOR, 1-4
AC SERVO MOTOR
AC SERVO MOTOR
AC SERVO MOTOR
AC SERVO MOTOR
AC SERVO MOTOR
AC SERVO MOTOR
AC SERVO MOTOR
6
4
12
12
24
24
24
12
1
1
1
4
2
1
2
2
2
2
2
基板感知センサー
コンベア安全確認センサー
ヘッド下降端センサー
ヘッド下降端センサー(異周波)
真空経路用パッキン
ヘッド上下用スプリング
ヘッド上下駆動用シリンダー
ヘッド上下用スプラインユニット
ヘッド上下用スプラインシャフト
レギュレーター用エアゲージ
T軸上下駆動シリンダー用センサー
プッシュアップロケートピン駆動シリンダー用センサー
X軸サーボモーター1000W
T軸サーボモーター60W
Y軸サーボモーター750W
R軸サーボモーター60W
Z軸サーボモーター60W
固定コンベア用W軸サーボモーター60W
移動コンベア用W軸サーボモーター60W
部品番号 部品名称 数量 備 考

第3章 調整
はじめに 3-3
1. マシン構成モード ............................................................................................................................................................................. 3-5
2. マシンデータ編集モード ........................................................................................................................................................... 3-6
3. マシン調整モード ............................................................................................................................................................................. 3-7
4. 手動モード ............................................................................................................................................................................................... 3-8
1. ヘッド部 3-10
1.1 ヘッドの機械的動作の確認................................................................................................................................................... 3-11
1.1.1 ヘッド下降動作・下降端検出機能の確認 3-11
1.1.2 真空発生動作の確認 3-14
1.1.3 真空センサーの機能の確認 3-16
1.2 機械座標 .................................................................................................................................................................................................. 3-17
1.2.1 マルチカメラ 3-18
1.2.2 ロケートピン基準 3-18
1.2.3 基板外形基準 3-19
1.2.4 廃棄位置 3-20
1.2.5 基板面/ 固定トレイ 3-22
1.2.6 同時吸着範囲 3-24
1.2.7 QFP装着浮代 3-24
1.2.8 リトライ回数の上限 3-24
1.2.9 廃棄ステーション位置 3-25
1.3 吸装着レベル ...................................................................................................................................................................................... 3-27
1.3.1 吸着レベル 3-28
1.3.2 装着レベル 3-30
1.4 R軸絶対精度補正 ............................................................................................................................................................................ 3-32
1.5 ノズル偏心補正 ................................................................................................................................................................................ 3-35
1.6 ヘッドオフセット ..........................................................................................................................................................................3-35
2. コンベア部 3-36
2.1 コンベアユニット ..........................................................................................................................................................................3-36
2.1.1 ロケートピン 3-37
2.1.2 メインストッパー 3-40
2.1.3 入口ストッパー 3-43
2.1.4 プッシュアップ 3-45
2.1.5 プッシュイン 3-48
2.1.6 エッジクランプ 3-51
2.1.7 トランスファーフック(搬送爪) 3-54
2.2 コンベア搬送部 ................................................................................................................................................................................ 3-57
2.2.1 コンベアベルトの張力 3-57
2.2.2 コンベア速度 3-58
2.2.3 基板センサー 3-61
目次のつづき
3. 画像認識装置 3-65
3.1 移動カメラ ............................................................................................................................................................................................ 3-66
3.1.1 移動カメラ照明 3-66
3.1.2 移動カメラスケール 3-70
3.2 マルチ認識カメラ ..........................................................................................................................................................................3-75
3.2.1 視野の調整 3-75
3.2.2 ピント & 絞り 3-78
3.2.3 照明光量 3-81
3.2.4 カメラスケール 3-84
3.3 光学系 ........................................................................................................................................................................................................ 3-88
4. フィーダープレート 3-89
4.1 フィーダープレートの平行調整....................................................................................................................................... 3-89
4.2 フィーダープレートのティーチング ........................................................................................................................... 3-92
4.3 部品吸着テスト ................................................................................................................................................................................ 3-96
5. 空圧装置 3-98
5.1 圧力レギュレーター(真空発生器系)........................................................................................................................ 3-98
5.2 圧力レギュレーター(駆動バルブ系)........................................................................................................................ 3-99
6. 作動軸部 3-100
6.1 マシンリファレンス .................................................................................................................................................................3-102
6.1.1 W軸マシンリファレンスの調整 3-103
6.1.2 Z軸マシンリファレンスの調整 3-104
6.1.3 X軸マシンリファレンスの調整 3-106
6.1.4 Y軸マシンリファレンスの調整 3-107
6.1.5 R軸マシンリファレンスの調整 3-108
6.1.6 T軸マシンリファレンス 3-109
6.2 2次リミット.....................................................................................................................................................................................3-110
6.2.1 X軸2 次リミットの設定 3-110
6.2.2 Y軸 2 次リミットの設定 3-112
6.3 ソフトリミット .............................................................................................................................................................................3-114
6.3.1 W軸ソフトリミットの設定 3-114
6.3.2 Z軸ソフトリミットの設定 3-117
6.3.3 X軸ソフトリミットの設定 3-119
6.3.4 Y軸ソフトリミットの設定 3-120
6.3.5 R軸ソフトリミットの設定 3-121
6.3.6 T軸ソフトリミットの設定 3-122
6.4 初期位置・初期移動 .................................................................................................................................................................3-123
6.4.1 W軸初期位置の設定 3-123
6.4.2 R軸初期位置の設定 3-125
6.4.3 T軸初期位置の設定 3-126
6.4.4 T軸初期移動の設定 3-128
7. 実装調整 3-130
7.1 自動搭載フィードバック .....................................................................................................................................................3-131
7.1.1 基板と部品の準備 3-131
7.1.2 搭載実行:AMF112** 3-132
7.1.3 自動搭載フィードバックの実行 3-133
7.1.4 搭載実行:ADJ_L_MOUNT_112** 3-135
7.2 搭載フィードバック .................................................................................................................................................................3-136