KD-2077_Maintenance_Guide_Rev1.1_C.pdf - 第37页
维修调整要领书 电动机的更换 电动机的拆卸 请拆下 保护罩 。(参考 ) 请拆下 保护罩 。(参照 ) 请拆下 电动机中转插头。 请拧松 电动机托架的螺钉,然后拆下 …
Rev1.1
维修调整要领书
2-8
2-4-2.θ皮带的安装
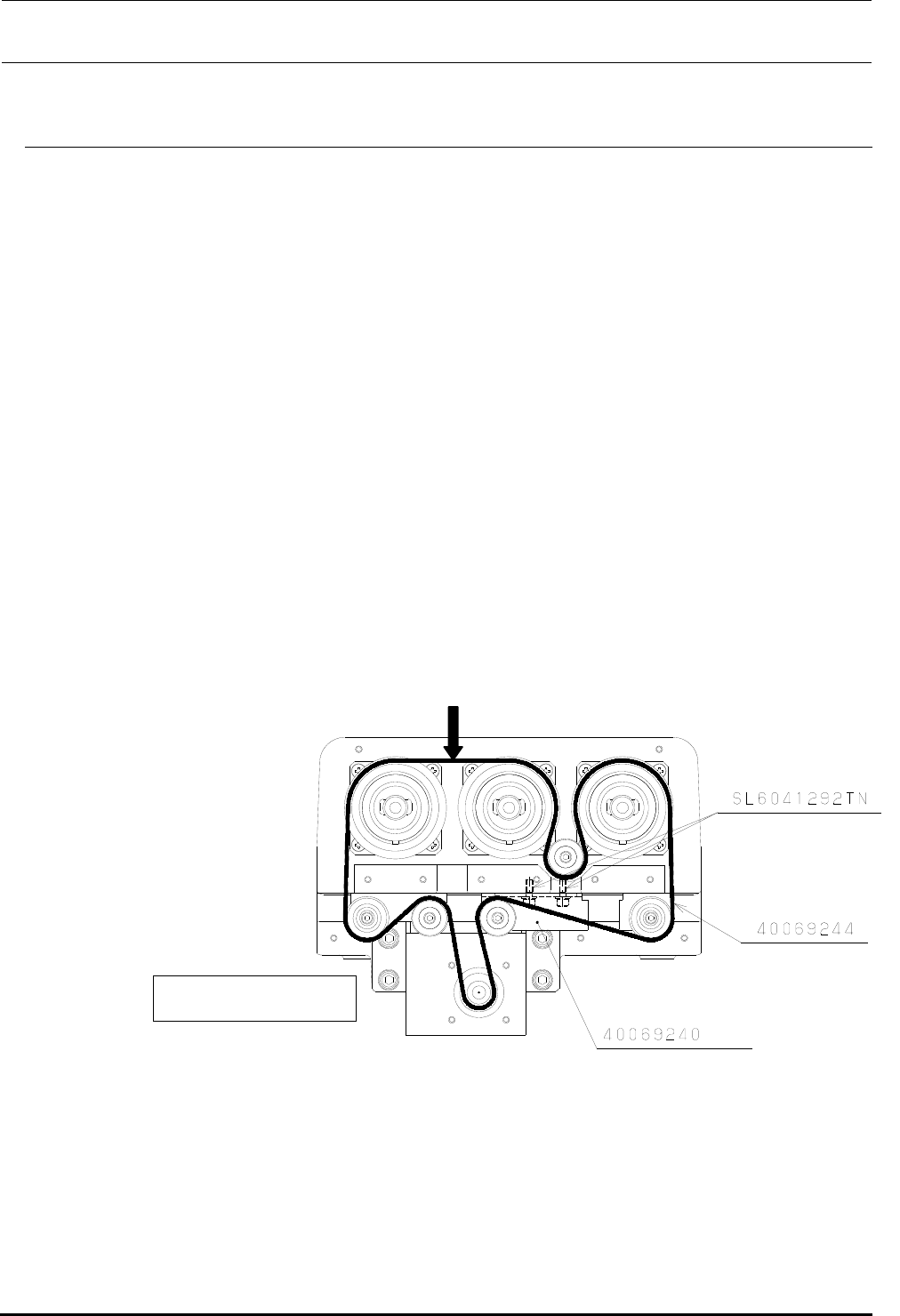
1) 请参考下图安装新皮带。(在 C,R 点胶头之间的空转皮带轮开始挂上时安装比较容易)
2) 请将θ空转轮托架 B 横着移动,轻轻地给皮带施加张力。
3) 请根据需要一边减弱张力一边调整各个点胶头的旋转位置,使得从点胶头的前方看 3 个方形块都
朝面前来。
4) 请调整θ空转轮托架 B 的位置,然后在张力在规定值以内时的位置进行固定。
5) 张力的确认请按照下述顺序进行。
1. 将θ电动机皮带轮按照逆时针和顺时针各旋转 6 周左右,使皮带轮和皮带协调。
2. 再次旋转θ电动机使得从正面看点胶头软管的方形块向着面前。
3. 让θ电动机皮带轮以微小的角度(10°左右)做 5 次往返运动。
4. 将皮带张力计靠近下图箭头所指位置,利用扳手等测量皮带的弹性张力。
5. θ电动机皮带轮按照顺时针每旋转 90°就进行一次张力测量,按照这样一直获取 12 个数据。
(→电动机转 3 圈注射器转 1 圈)
6. 取得 12 个数据的平均值,然后和规定值进行比较。
规定值:用 UNITTEA 制的皮带张力计测得张力:29±5[N]
UNITTEA 制的皮带张力计的设定值
MASS = 2.5g/m
WIDTH = 6mm/R
SPAN = 68mm
6) 请把 MS 参数(θ轴原点偏差)3 轴都再次进行取得。
夹紧转矩:3.7Nm
θ时机皮带
θ空转轮托架 B
从下看了的图
维修调整要领书
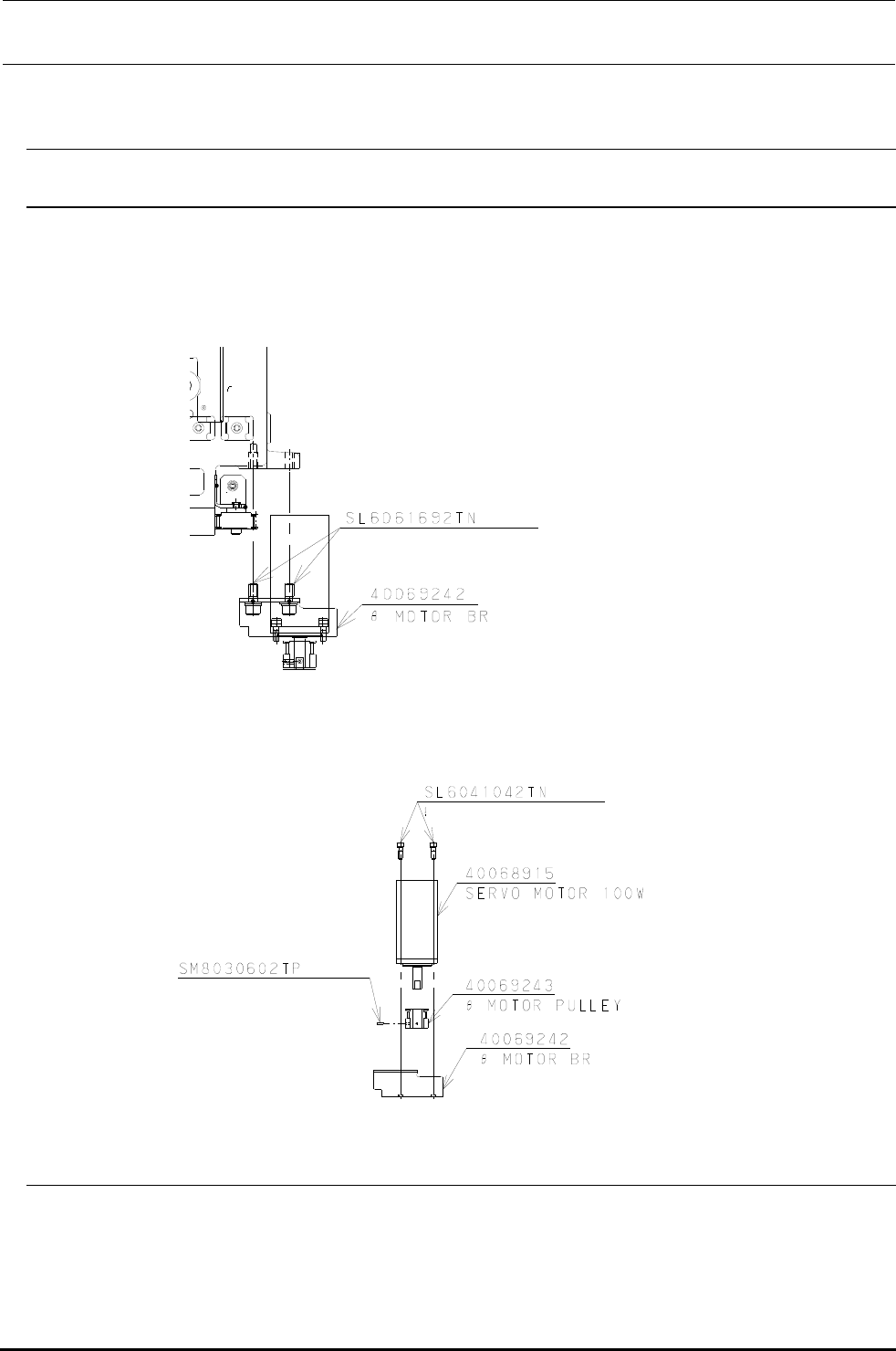
电动机的更换
电动机的拆卸
请拆下保护罩 。(参考 )
请拆下保护罩 。(参照 )
请拆下电动机中转插头。
请拧松电动机托架的螺钉,然后拆下电动机和电动机托架。
请拆下电动机的固定螺钉,将电动机从电动机托架中取出来。
请拧松皮带轮的止动螺钉然后将皮带轮从电动机中拆卸下来。
电动机的安装
安装按照与拆卸相反的顺序进行。
请参考 对皮带轮的张力进行调整。
请把 参数(轴原点偏差) 轴都再次进行取得。
止动螺钉
夹紧转矩:
止动螺钉
夹紧转矩:
止动螺钉
夹紧转矩:
维修调整要领书
台面降到最低的状态
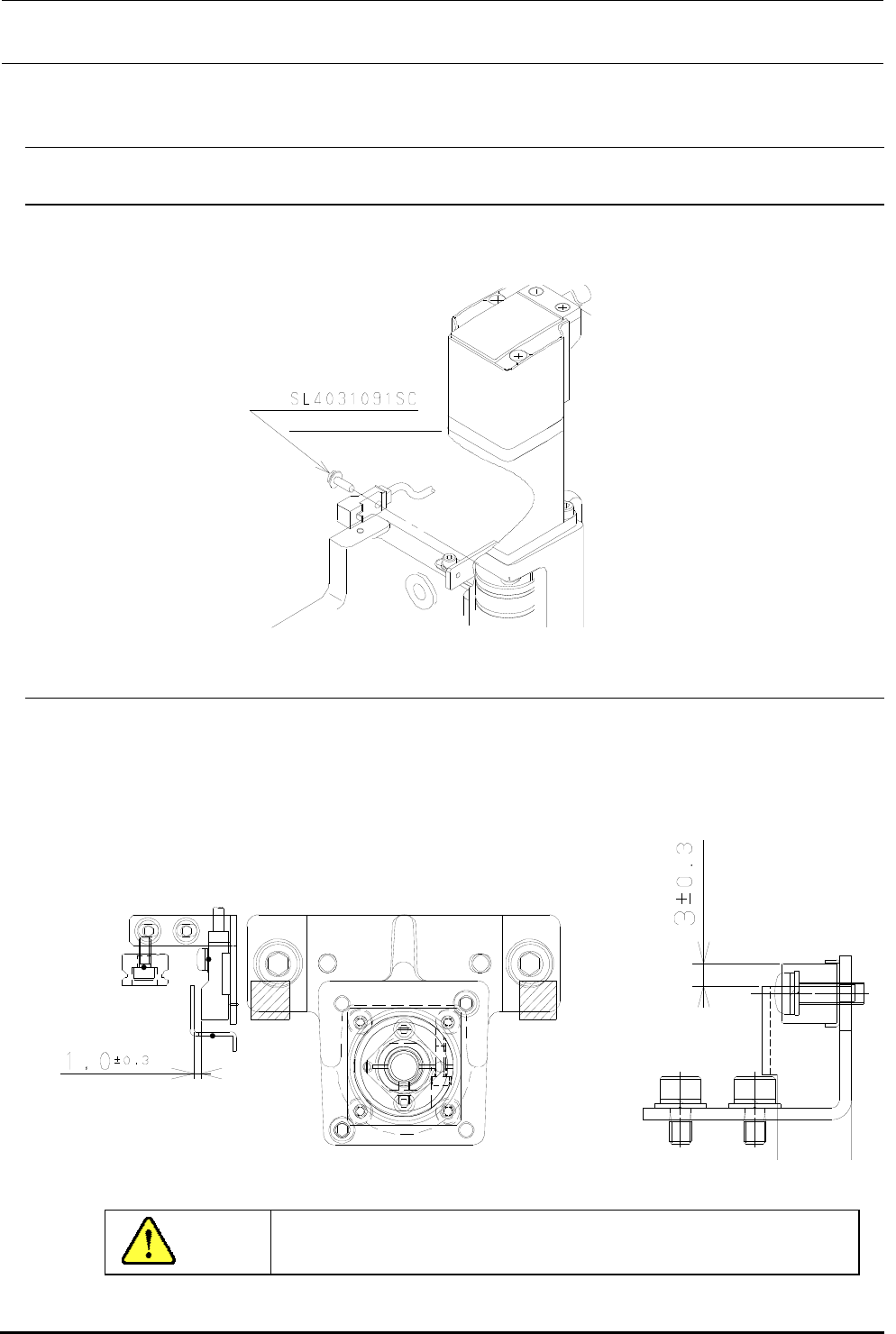
轴原点传感器的更换
轴原点传感器的拆卸
请从点胶头主基板中拆下 轴原点传感器的插头。()
请卸下 轴原点传感器的固定螺钉,然后拆下 传感器。
轴原点传感器的安装
请把新的 轴原点传感器固定到原点传感器托架上。
安装后,请将 传感器和配件的位置关系调整如下图所示。
(上下方向:用配件的长空进行调整,左右方向:用传感器托架的长空进行调整)
请将 轴原点传感器的插头安装到点胶头主基板上。()
把 台面抬到最高时,请注意避免配件上端接触扎线以及空气软管。
请把 参数( 轴原点偏差) 轴都再次进行取得。
把 台面抬到最高时,请注意避免配件上端接触扎线以及空气软管。
夹紧转矩:
危
险