MSR服务手册.pdf - 第86页
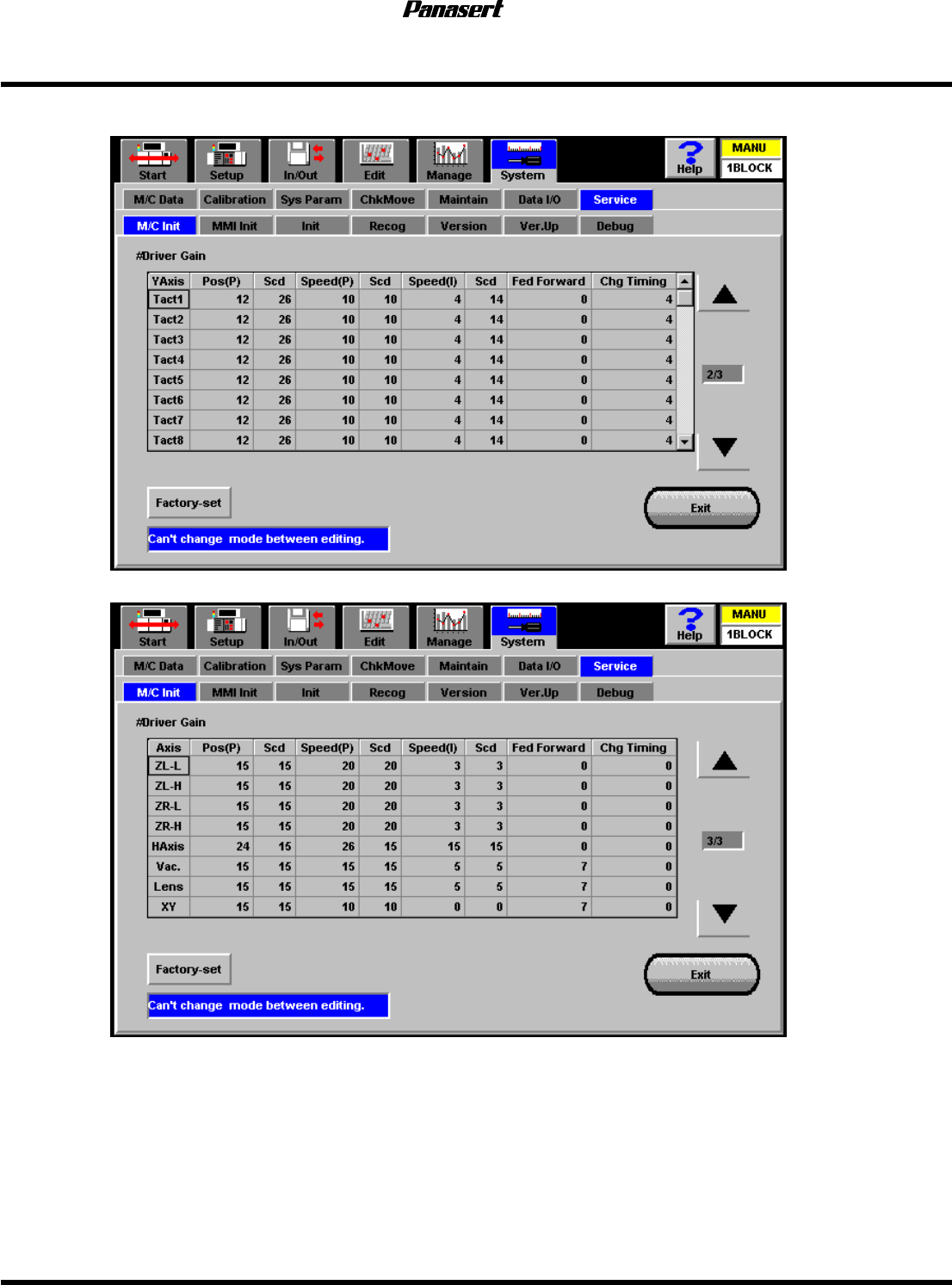
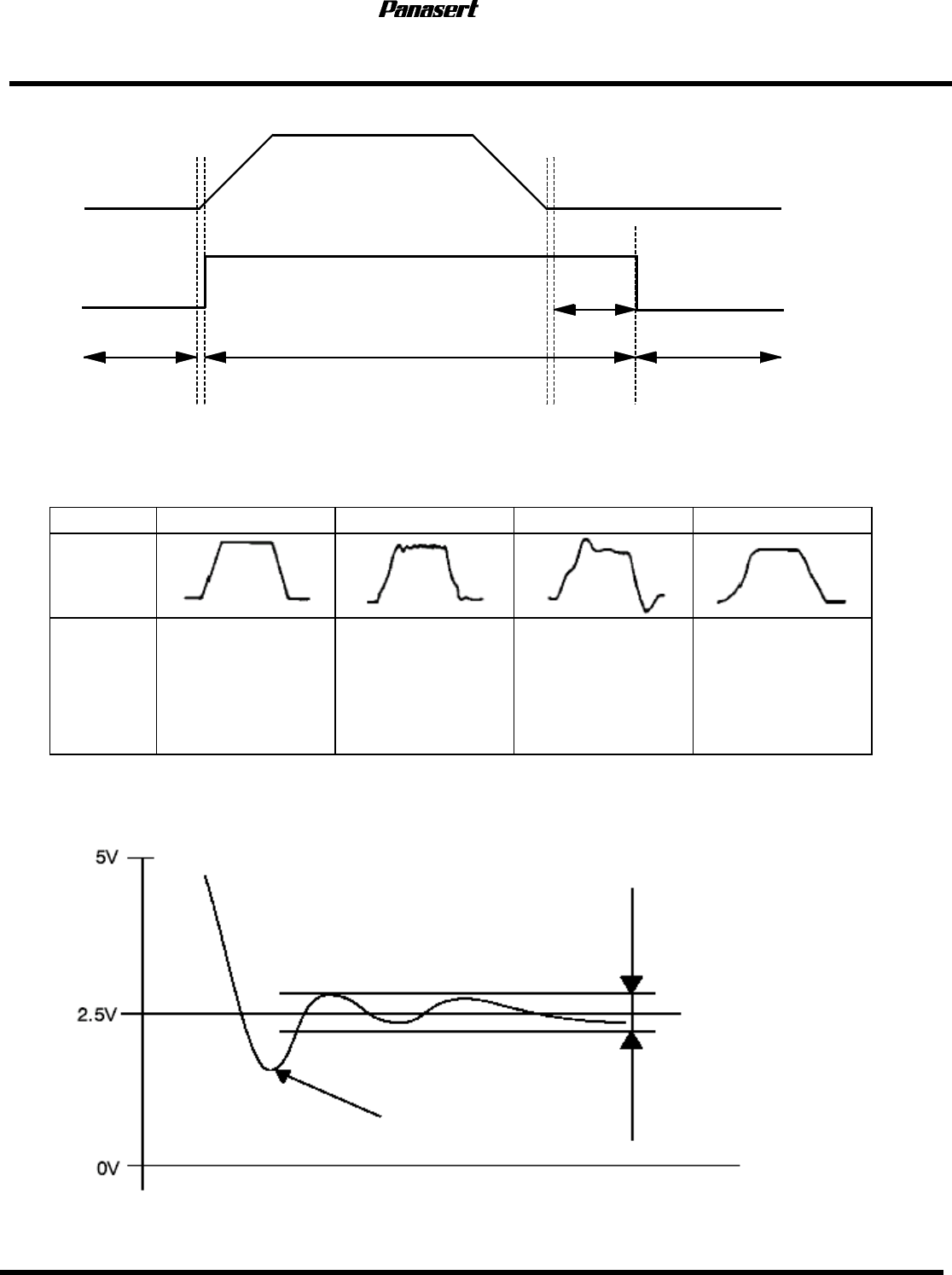
MSR 服务手册 5.1 调整 AC 伺服增益 5.1-5 D14SCC- 84-040-A 0 1ms 延 迟 1ms 延 迟 位置指令 增益切 换 停止增益切 换时间 第 2 增益 调 整范 围 第 1 增益 调 整范 围 第 2 增益 调 整范 围 8. 按照下 表所示,更改 第 1 增益设定 值。 = 确认 确认 确认 确认 = 确认“前馈增益”值为 标准值。 电机状态 电机状态 电机状态 电机状态 理想 理想 理想 理想 产生…
MSR
服务手册
5.1 调整 AC 伺服增益
D14SCC-84-040-A0 5.1-4
7. 确认增益设定值和标准增益设定值的差。
=确认
确认确认
确认=
软件版本升级时伴有设定值的变更。
=提示
提示提示
提示=
增益的切换:
NC225、P326伺服系统的驱动器软件如下图所示对移动和位置保持分别进行最合适的增益切换。
MSR
服务手册
5.1 调整 AC 伺服增益
5.1-5 D14SCC-84-040-A0
1ms
延
迟
1ms
延
迟
位置指令
增益切
换
停止增益切换时间
第
2
增益
调整范围
第
1
增益
调
整范
围
第
2
增益
调整范围
8. 按照下表所示,更改第1增益设定值。
=确认
确认确认
确认=
确认“前馈增益”值为标准值。
电机状态
电机状态电机状态
电机状态 理想
理想理想
理想 产生噪声
产生噪声产生噪声
产生噪声 运转不平稳
运转不平稳运转不平稳
运转不平稳 定位精度不良
定位精度不良定位精度不良
定位精度不良
波形
波形波形
波形
调整步骤
调整步骤调整步骤
调整步骤
1. 减少速度比例增益
值。
2. 减少速度积分增益
值。
3. 减少位置比例增益
值。
1. 减少位置比例增益
值。
2. 增加速度比例增益
值。
3. 减少速度积分增益
值。
1. 增加位置比例增益
值。
2. 增加速度比例增益
值。
3. 增加速度积分增益
值。
9. 运行程序,并比较电机波形和理想波形。
• 从P326驱动器的前面端子‘PRM’输出偏差值,并用示波器测定此输出波形。
第
1
个峰值除外
(
H
轴以外的轴)
偏差值输出测定点
MSR
服务手册
5.1 调整 AC 伺服增益
D14SCC-84-040-A0 5.1-6
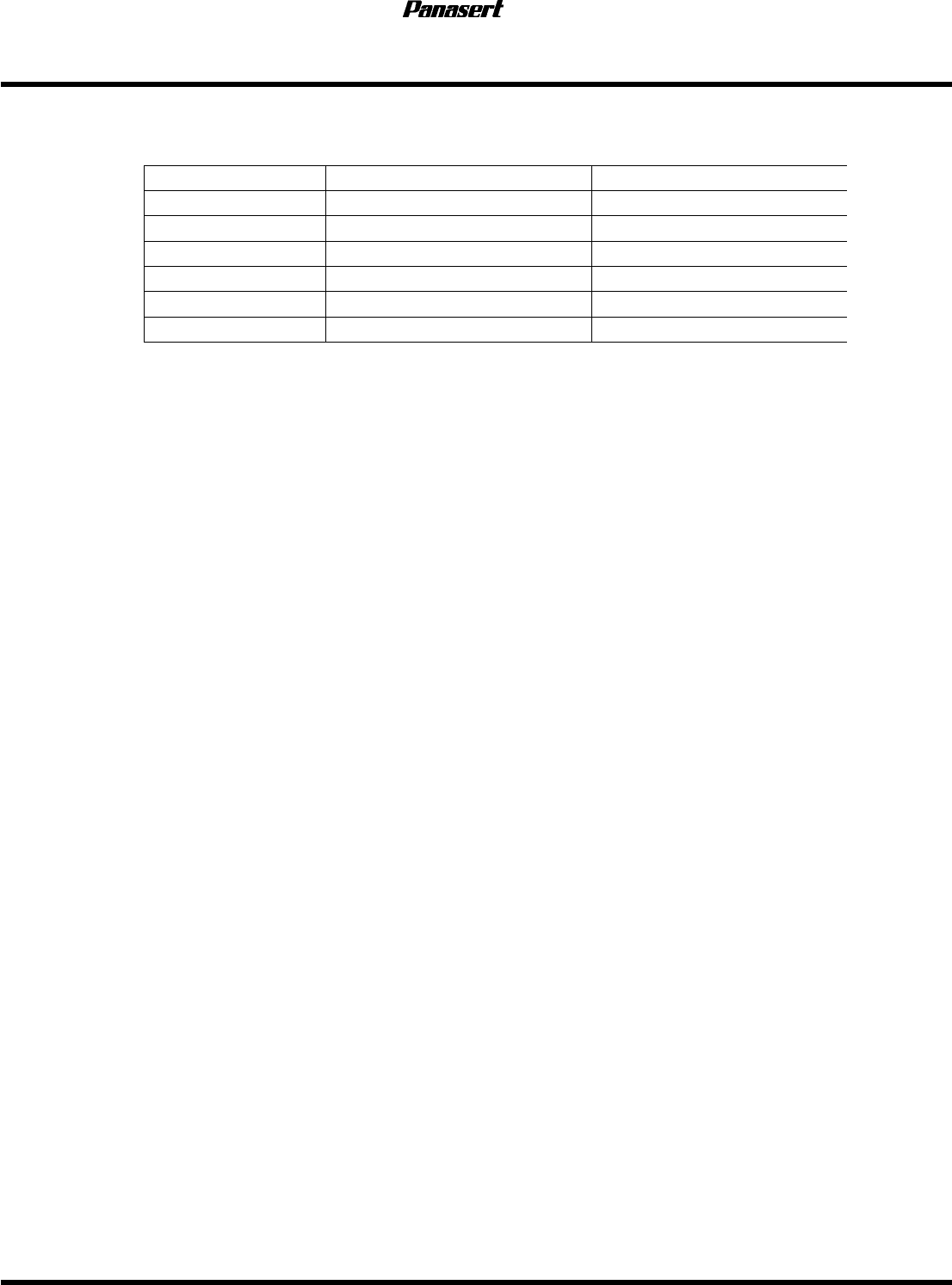
·前页图表中在“偏差值输出测定点”所测定的各轴的基准值如下:
轴各称
轴各称轴各称
轴各称 偏差值基准
偏差值基准偏差值基准
偏差值基准 DIP SW4设定
设定设定
设定
X 轴
轴轴
轴 ±250mV
OFF
Y 轴
轴轴
轴 ±250mV
OFF
ZA 轴
轴轴
轴 ±250mV
OFF
ZB 轴
轴轴
轴 ±250mV
OFF
H 轴
轴轴
轴 ±250mV
OFF
镜筒
镜筒镜筒
镜筒 ±250mV
OFF
=确认
确认确认
确认=
请确认所测定的偏差值在上述表内基准值以下,并确认X,Y,Z轴与H轴同时停止。
10. 如果波形状态不理想,再次进行调整。
=提示
提示提示
提示=
尽可能只在更改第1增益设定值时,进行增益调整。
11. 如果波形状态仍然不理想,按照同第1增益相同的步骤,更改第2增益设定值。
=确认
确认确认
确认=
请确认“前馈”、“转换时序”的值为标准值。
12. 运行程序,确认电机波形。