KE-2070-2080-2080R 操作手册2 Rev00.pdf - 第308页
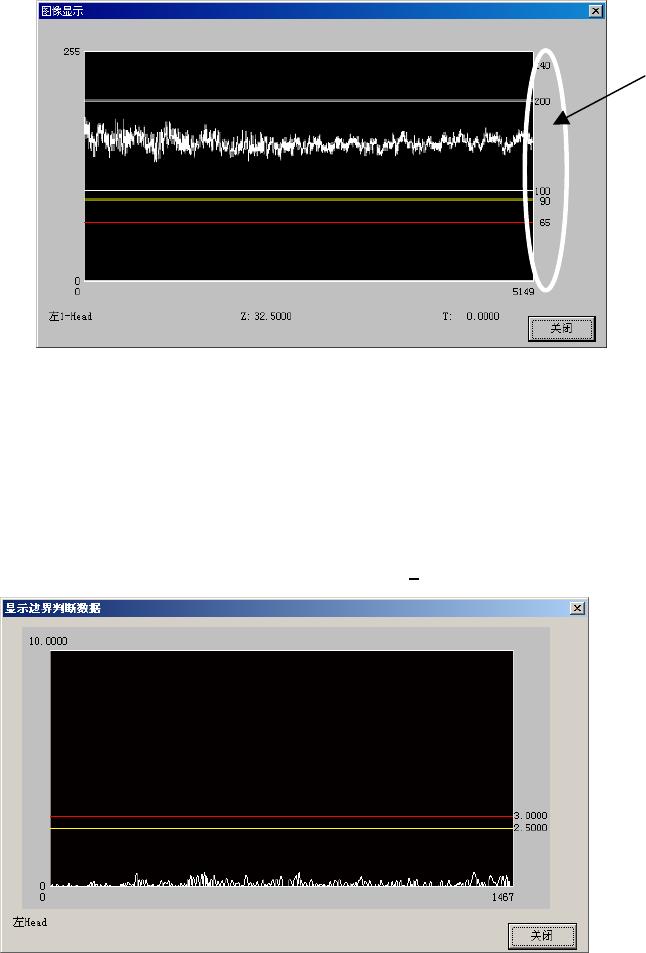
操作手册Ⅱ Rev02 4-77 请确认:激光水平值在 2 条白线的范围内,而且均匀地聚集在一起。 如果出现急剧下降的位置,或数值极低(在黄 线以下)时,激光面有可能脏污。请清洁激光面。 如果元件端面到达水平值很低的位置时 ,会产生定心不稳定,可能导致激光识别发生错误。 图 4-49 图像显示例 ※ 激光 水平值 : 受光部接收发光部发出的光的明亮度用数值 0(暗)~255(亮)来表示。 因 此,有脏污等时水平值会下降。 2) 边界确认…
操作手册Ⅱ Rev02
4-76
4-5-3 贴片头控制菜单
右击跟踪球或按命令按钮的“贴片头控制菜单”,即可显示弹出菜单。从菜单的列表中选择
要执行的项目后,即可执行该动作。
从弹出菜单中选择项目后,轴将立即移动。在选择前,请务必确认装置内
部无人作业。此外,为了避免人身伤害,在运行过程中,切勿将手放入装
置内部,也不要将脸和头靠近装置。
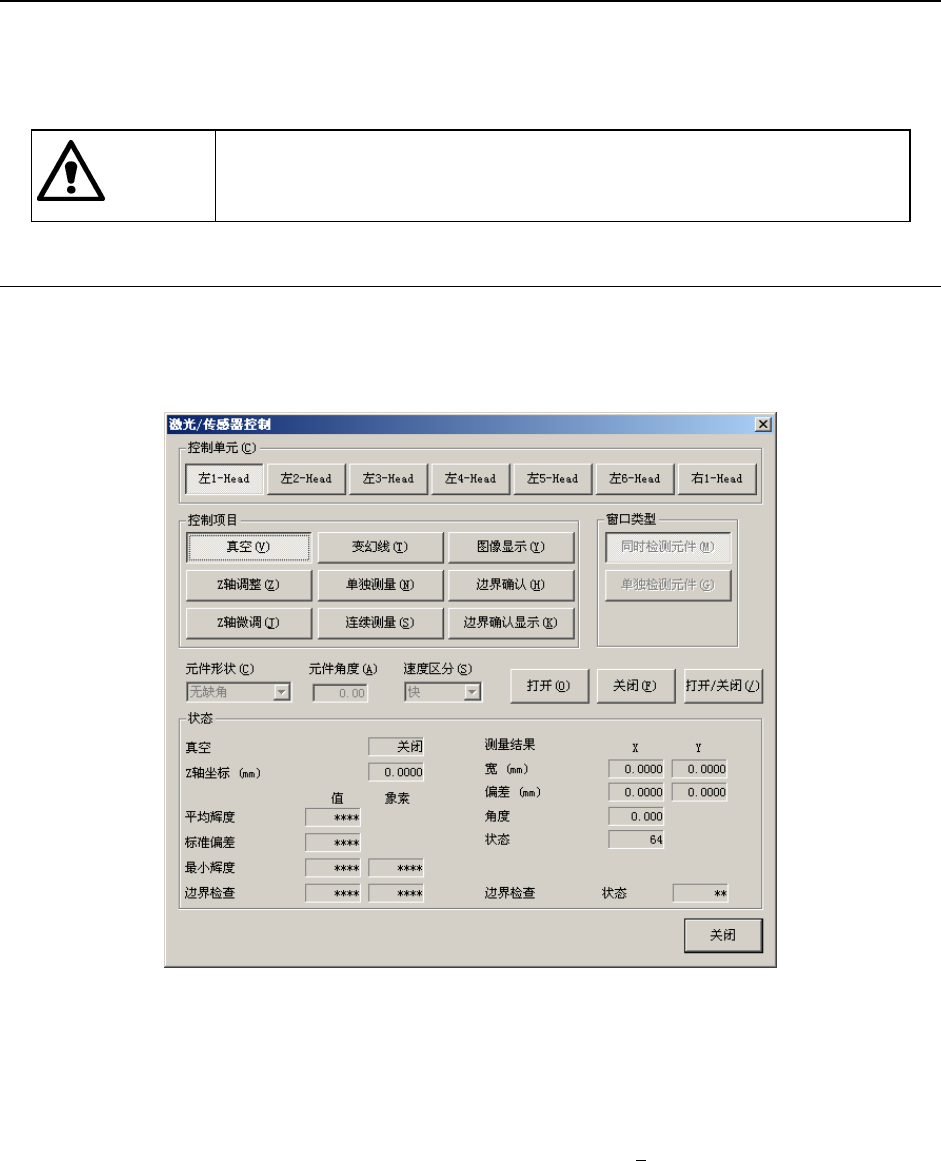
4-5-4 激光图像显示
可以确认激光的状态。
激光经常出错时,或清洁激光以后,请按下列说明进行检查。
从菜单栏里选择 「控制」→「贴片头」→「激光/传感器控制」 ,显示出激光/传感器控制画面。
图4-48 激光/传感器控制画面
1) 显示图像
显示所选择的贴片头激光传感器图像数据。
请把贴片头和吸嘴移动到激光面的上面。
在控制项目的“显示图像”选中的状态下,请单击<执行(E
)>按钮或按[F3]键,进行控制。
警告
操作手册Ⅱ Rev02
4-77
请确认:激光水平值在 2 条白线的范围内,而且均匀地聚集在一起。
如果出现急剧下降的位置,或数值极低(在黄线以下)时,激光面有可能脏污。请清洁激光面。
如果元件端面到达水平值很低的位置时,会产生定心不稳定,可能导致激光识别发生错误。
图 4-49 图像显示例
※ 激光水平值:受光部接收发光部发出的光的明亮度用数值 0(暗)~255(亮)来表示。因
此,有脏污等时水平值会下降。
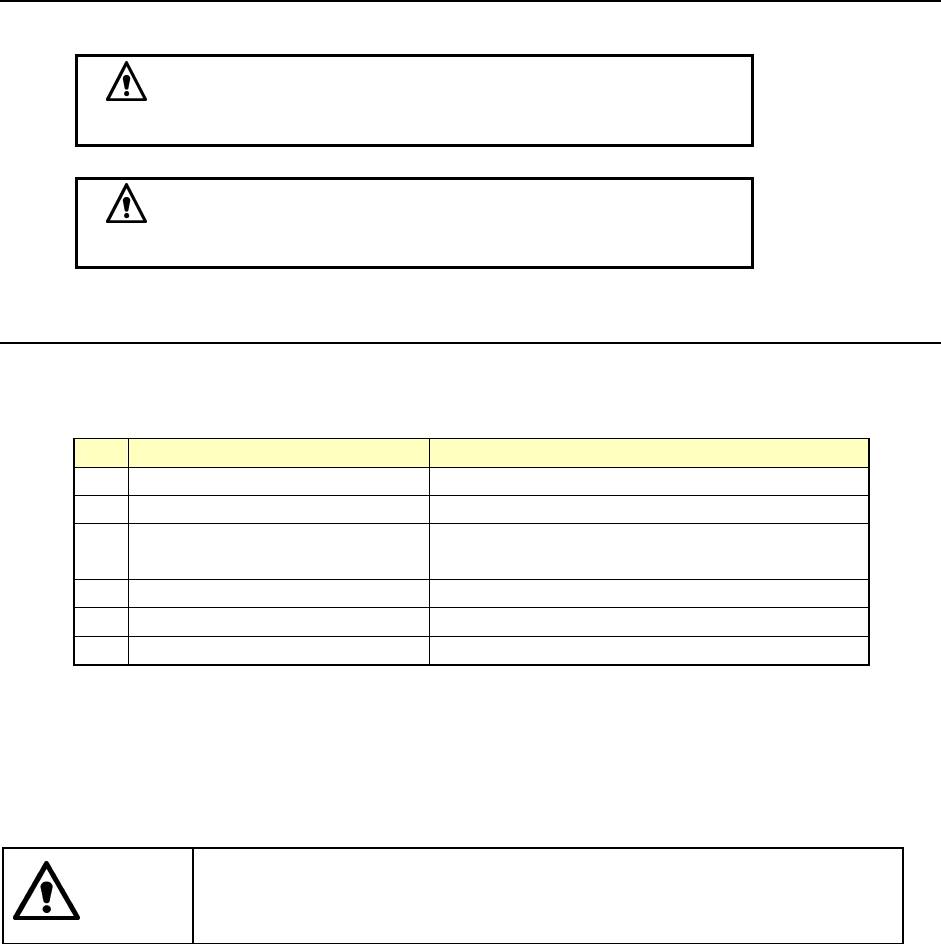
2) 边界确认显示
对所选择的贴片头的边界进行全面激光传感检查(脏污检查), 检查结果以数据形式显示。
选中控制项目的“显示边界检查”时, 单击<执行(E
)>按钮或按[F3]键,进行控制。
图 4-50 显示边界检查
边界检查与元件检测时的情况接近,是用激光感应来确认的功能,可更加确切地判断激光传
感器的好坏,而通过图像检查则难以判断。边界检查以量纲为1的值表示,超出红线,元件
端面到达该位置时,定心会变得不稳定。超过红线时,请进行清洁工作。
激光水平值
操作手册Ⅱ Rev02
4-78
4-6 自动校准
用自动校准可对机器的部分基本设置信息(MS参数)进行变更。
如果设置错误,有可能出现误动作。
在进行设置时,请与本公司商洽后再进行操作。
接通电源后运行自动校准时,请进行 15 分钟以上预热。
4-6-1 概要
用自动校准设置的项目如下表所示。
表4-4 自我校准项目
No. 自动校准组 设置内容
1 激光传感器高度 从基板上面所看到的激光传感器高度
2 吸嘴旋转中心 由激光传感器决测量的吸嘴旋转中心
3 贴片头偏差
各贴片头相对于 OCC 的安装位置
与激光校准与主体的安装角度
4 VCS 偏差 VCS 摄象机的安装位置及安装角度
5 真空校准 真空的校准值
6 FCS 柔性校准系统(贴片综合校准系统,选项)
※在取得偏移值的操作中需要使用治具时, 应在选择菜单时,把治具移到方便贴片头安装的位置(等
待位置)上。
※可控制的设置项目(移动等待位置/打开滑板/关闭滑板)导航显示在提示栏上。
警告
打开画面时,轴会移动。打开画面之前,请务必确认装置内部无人作业。
此外,为了避免人身伤害,在运行过程中,切勿将手放入装置内部,也不
要将脸和头靠近装置。
注意
注意