RS-1 机器规格书.pdf - 第14页
10 4- 5 对象元件 ( 1 )元件尺寸、 元件高度 < RS-1 > 单位 : mm 识别方法 适用尺寸 备注 × 激光识别 L NC120 -8 (注 4 ) 0402 ~□ 50 图像统一识别 (注 1 ) 54mm 视野摄 像机 (注 2 ) 反射照明 □ 3.0 ~□ 50.0 塑封尺寸□ 1.7 mm 以上 透过照明 □ 3.0 ~□ 50.0 24 mm v iew ca mera 反射照明 1005 ~□ 24. 0…
9
4-3 贴片循环时间(每小时的元件实际贴片数量)
①
激光识别
29,000 CPH
*1 把贴片元件 0603,1005 电容器在 200×200mm 基板上依次按 0°、90°、180°、270°角度贴装 400 件
时平均每小时可贴装的点数。 (按 IPC9850 标准)
②图像识别
单位:CPH
供给装置
RS-1
供料器
*1
11,300
MTS (TR8SR) *2
5,700
*1 使用带式供料器把外形尺寸□7mm 以下的引脚元件从后的带式供料器(RF08AS)进行贴装
时的循环时间。
*2 把贴片元件 7mm 以下的 QFP、BGA 在 330×250mm 基板上依次按 0°、90°、180°、270°角度贴
装 32 件时平均每小时可贴装的件数。
*3 不含吸嘴交换、基板传送、BOC 标记识别时间。
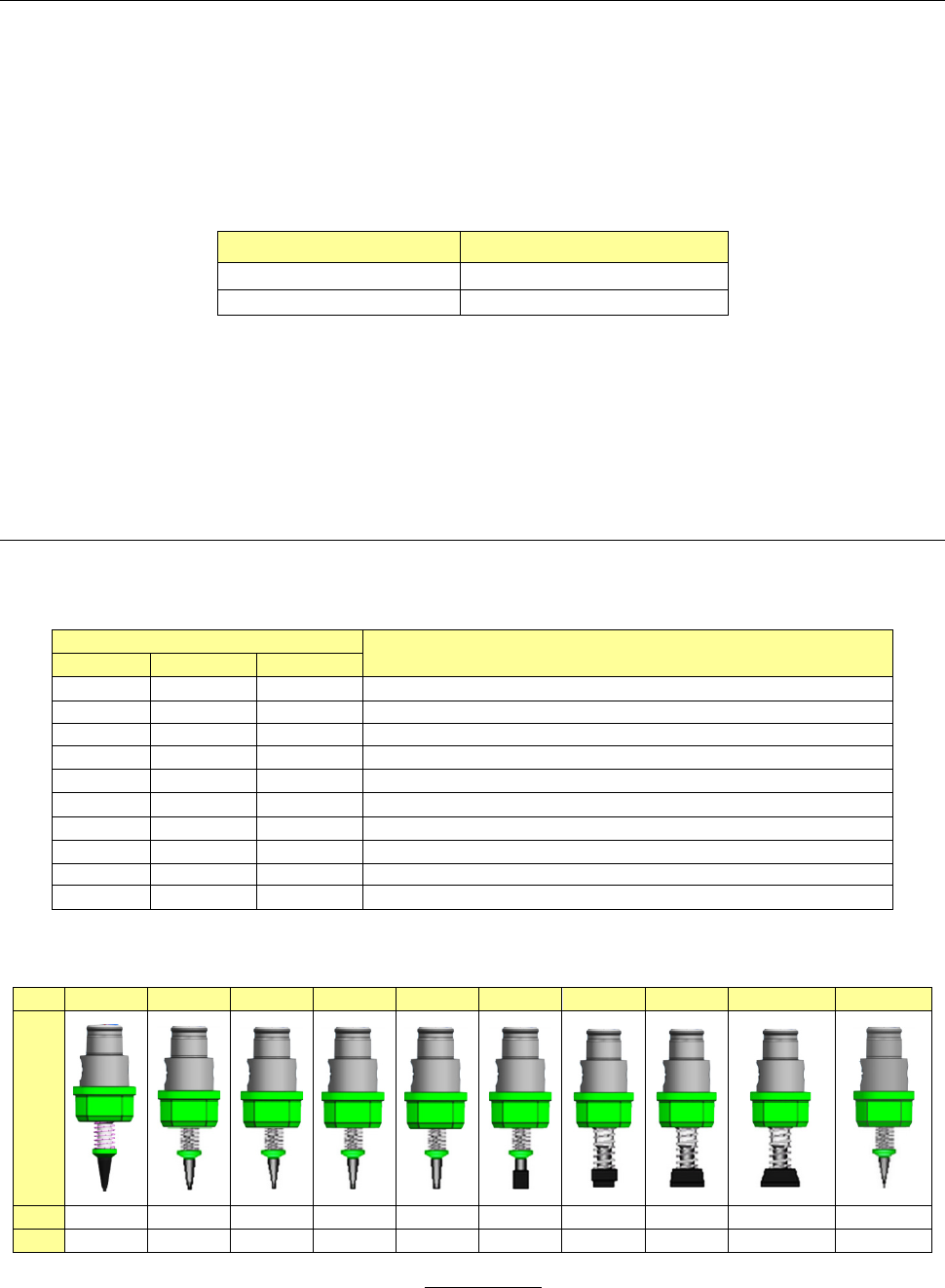
4-4 吸嘴
为了提高各种不同元件的贴片的可靠性,有下表多种吸嘴的设定。
表 吸嘴
种类
吸嘴
对象元件
编号
内径
外径
7500
2-φ0.4
1.0 x 0.5
1005, 1608, 2012 *
注
1 SOT (
模块部
1.6 x 0.8)
7501
φ0.25
0.7 x 0.4
0603
7502
φ0.4
φ0.7
1005
7503
φ0.6
φ1.0
1608, 2012, SOT(
模块部
1.6 x 0.8), SOT(
模块部
2.0 x 1.25)
7504
φ1.0
φ1.5
2012, 3216, SOT23,SOT(
模块部
2.0 x 1.25)
7505
φ1.7
φ3.5
铝电解电容
(
小
),
钽电容
,
微调电容器
7506
φ3.2
φ5.0
铝电解电容
(
中
),SOP(
窄幅形
),SOJ,
连接器
7507
φ5.0
φ8.5
铝电解电容
(
大
),SOP(
宽幅型
),TSOP,QFP,PLCC,
连接器
7508
8.5 x 6.5
10.0 x 8.0
QFP, PLCC, BGA
7509
φ
0.1
0.4 x 0.2
注 1:因 2012R 吸取面的形状不同(厂家及电阻不同等),有时会出现
θ
偏差,需要进行 2012R 元件的
高密度贴片(相邻 0.3mm 以下)时请使用 7504 吸嘴。
No
.
7500
7501
7502
7503
7504
7505
7506
7507
7508
7509
外观
外径
1.0x0.5mm
0.7x0.4mm
φ0.7mm
φ1.0mm
φ1.5mm
φ3.5mm
φ5.0mm
φ8.5mm
10.0x8.0 mm
0.4×0.2mm
内径
2xφ0.4mm
φ0.25mm φ0.4mm φ0.6mm φ1.0mm φ1.7mm φ3.2mm φ5.0mm
8.5x6.5mm
φ0.1mm
图
吸嘴形状
10
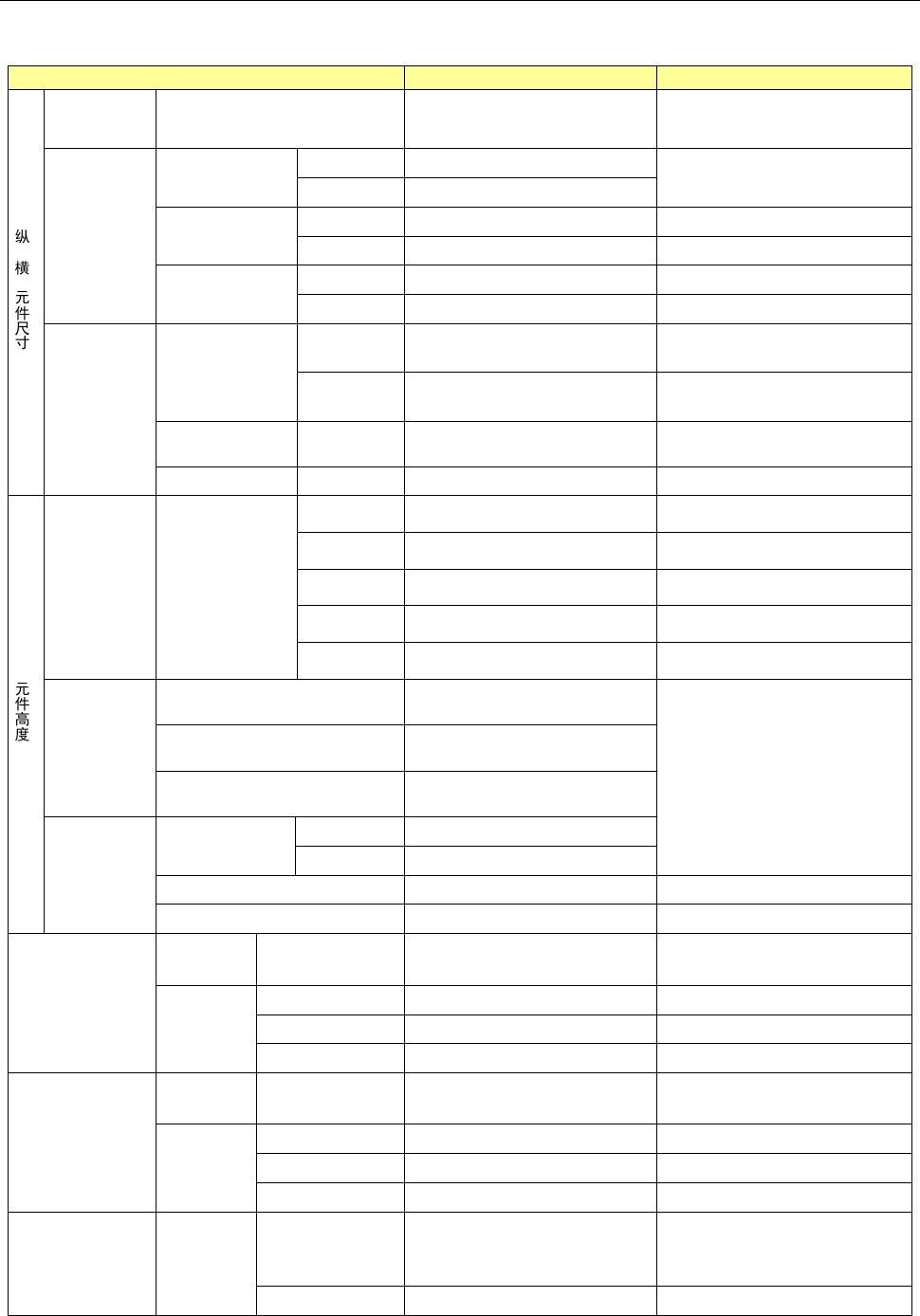
4-5 对象元件
(1)元件尺寸、元件高度
<RS-1>
单位: mm
识别方法 适用尺寸 备注
×
激光识别 LNC120-8(注 4) 0402~□50
图像统一识别
(注 1)
54mm 视野摄像机
(注 2)
反射照明 □3.0~□50.0
塑封尺寸□1.7 mm 以上
透过照明 □3.0~□50.0
24 mm view camera
反射照明
1005
~□
24.0
透过照明
□3.0~□24
10 mm view camera
反射照明
0.25x0.125
~□
8
透过照明
□
3
~□
8
图像分割识别
(注 1)
54mm 视野摄像机
反射照明
最大:50×150(1×3 分割时)
□74(2×2 分割时)
塑封尺寸□1.7 mm 以上
透过照明 最大:50×120(1×3 分割时)
塑封尺寸□1.7 mm 以上
短边应在 17mm 以上
24 mm view camera
反射照明
~
24x72
(
1x3
分割)
~
□48
(
2x2
分割)
10 mm view camera
反射照明
~
□16
(
2x2
分割)
激光识别 LNC120-8
类别 1 0.05~1 参照“(2)激光识别元件的识别高度”
类别 6 0.05~6
类别 12 0.05~12
类别 20 0.05~20
类别 25 0.05~25
图像统一识别
54mm 视野摄像机 0.01~25
关于元件尺寸和高度的限制,
参 照“ (3)
图像识别元件的识别高度”
24 mm view camera
0.01~25
10 mm view camera
0.01~25
图像分割识别
54mm 视野摄像机
对角 86 不到 0.01~25
对角 86 以上 0.01~2.0 或 10.0
24 mm view camera
0.01~25
10 mm view camera
0.01
~
25
引脚间距
激光识别
LNC120-8
0.65 以上
如用激光识别,不能识别引脚间距、
球脚间距。
VCS 识别
(注 3)
54mm 视野摄像机 0.38 ~ 2.54
24 mm view camera
0.20
~
2.54
10 mm view camera
0.2
~
0.5
球间距
激光识别
LNC120-8
1.00~3.00
如用激光识别,不能识别引脚间距、
球脚间距。
VCS 识别
(注 3)
54mm 视野摄像机 0.50~3.00
24 mm view camera
0.25
~
2
10 mm view camera
0.1
~
0.5
球径
VCS 识别
(注 3)
54mm 视野摄像机
φ0.3~φ1.0
24 mm view camera
φ0.10
~
φ0.63

11
10 mm view camera
φ0.04
~
0.2
引脚长度
VCS 识别
(注 3)
54mm 视野摄像机 0.4~
除了引脚前端形状为平的之外,不属
于精度保证范围。
24 mm view camera
0.2~
10 mm view camera
0.2~
注 1:使用透射照明进行引脚识别时,因不采用完全的平行光,引脚显示较细。
而且视野的一部分领域,因为把从下面照射的光线反射到 Head 的背景板作为透射光利用,因此引脚
位置在从下面的光照射领域时,在引脚面反射,使得引脚显得更细,有时甚至看不见。因此透射照明
的引脚识别,不列入精度保证范围内。
注 2:最大尺寸,包括元件设置位置及用 Head 吸取时的示教误差在内,识别时的识别范围,使用 VCS 时,
应在□52mm 视野范围内。
图像识别的适用元件最大尺寸,吸取时 XY 误差在±1mm 以下,角度误差±3°以下。
超过□7mm 的元件要适用图像识别时,对邻接的 Head 不能分配元件。
透射照明识别元件,在从元件边界起 1.3mm 以内位置吸取时,有时因为吸嘴的影子,识别不稳定。