RX-6_机器控制参数.pdf - 第52页
机器控制参数 2- 45 No. 项目 输入范围 单位 备考 最小值 最大值 124 转换增益振动控制 2 振动频率 稳定设置 125 转换增益振动控制 2 共振频率 稳定设置 126 增益切换模式控制增益 127 厂商设置用 128 厂商设置用 129 厂商设置用 130 厂商设置用 131 误差过大警报级别 0.1rev 132 电磁闸顺序输出 ms 133 检出器脉冲输出选择 Pulse/ rev 134 功能选择 C-1 135…
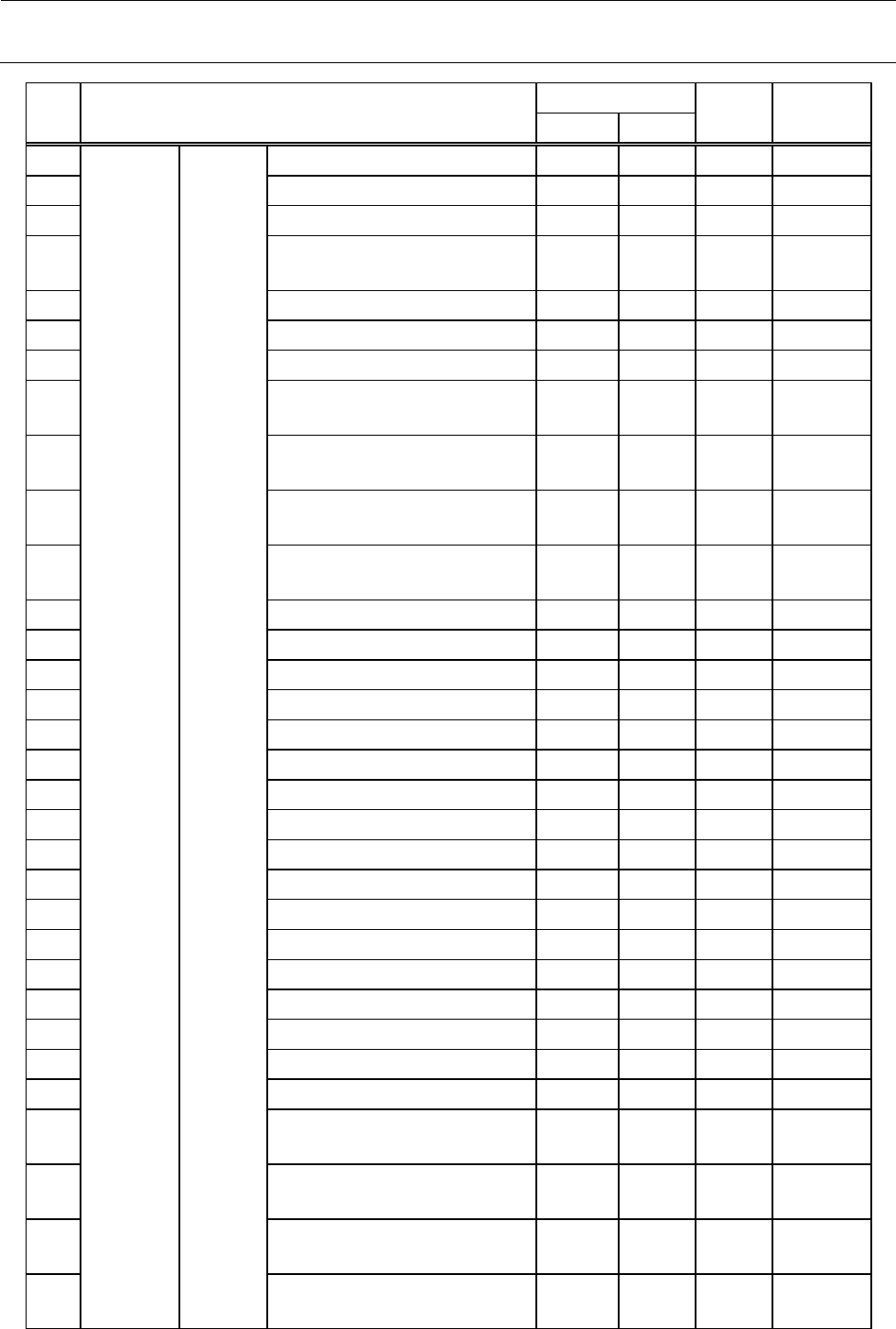
机器控制参数
2-44
No.
项目
输入范围
单位
备考
最小值
最大值
92 转换增益选择
93 转换增益条件
94 转换增益时常数
95 转换增益负荷惯性力矩比/
负载质量比
%
96 转换增益位置控制增益 Rad/s
97 转换增益速度控制增益 Rad/s
98 转换增益速度积分补偿
99 转换增益振动控制1振动频率
设置
100 转换增益振动控制1共振频率
设置
101 转换增益振动控制1振动频率
稳定设置
102 转换增益振动控制1共振频率
稳定设置
103
PI-PID 控制切换滞留脉冲
104 厂商设置用
105 厂商设置用
106 厂商设置用
107 厂商设置用
108 厂商设置用
109 厂商设置用
110 厂商设置用
111 指令陷波滤波器
112 机械共振抑制过滤器3
113 陷波形状选择3
114 机械共振抑制过滤器4
115 陷波形状选择4
116 机械共振抑制过滤器5
117 陷波形状选择5
118 振动控制2振动频率设置
119 振动控制2共振频率设置
120 振动控制2振动频率稳定
设置
121 振动控制2共振频率稳定
设置
122 转换增益振动控制2振动频率
设置
123 转换增益振动控制2共振频率
设置
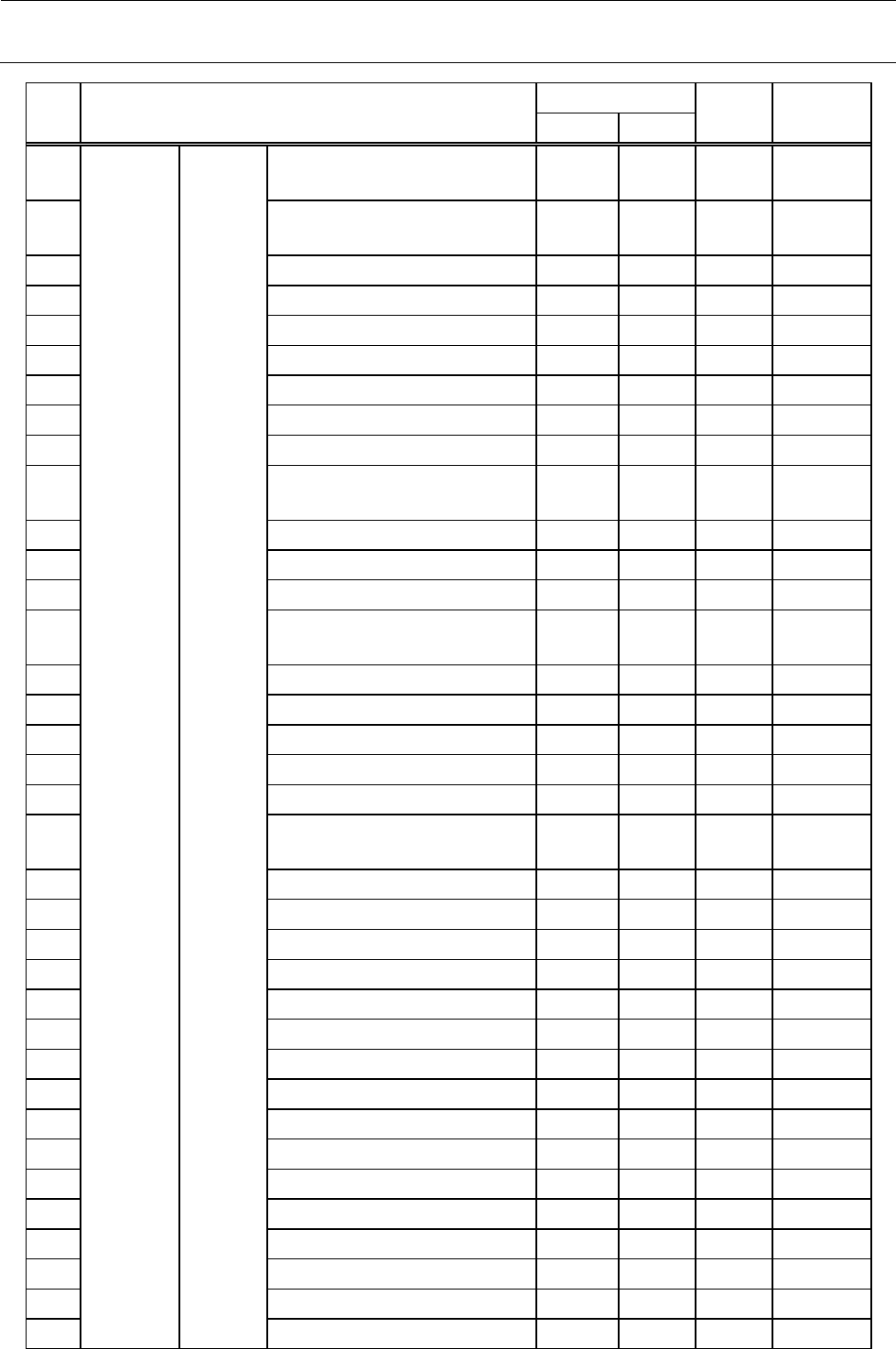
机器控制参数
2-45
No.
项目
输入范围
单位
备考
最小值
最大值
124 转换增益振动控制2振动频率
稳定设置
125 转换增益振动控制2共振频率
稳定设置
126 增益切换模式控制增益
127 厂商设置用
128 厂商设置用
129 厂商设置用
130 厂商设置用
131 误差过大警报级别 0.1rev
132 电磁闸顺序输出 ms
133 检出器脉冲输出选择 Pulse/
rev
134 功能选择C-1
135 功能选择C-2
136 功能选择C-3
137 零速度 Pulse/
rev
138 过速警报检测级别
139 模拟监视器1输出
140 模拟监视器2输出
141 模拟监视器1偏移量 mv
142 模拟监视器2偏移量 mv
143 模拟监视器反馈位置输出基准
数据
144 厂商设置用
145 功能选择C-3A
146 功能选择C-4
147 功能选择C-5
148 厂商设置用
149 功能选择C-7
150 删除警报履历
151 厂商设置用
152 厂商设置用
153 強制停止时减速时间常数
154 厂商设置用
155 功能选择C-8
156 功能选择C-9
157 厂商设置用
158 厂商设置用
159 厂商设置用
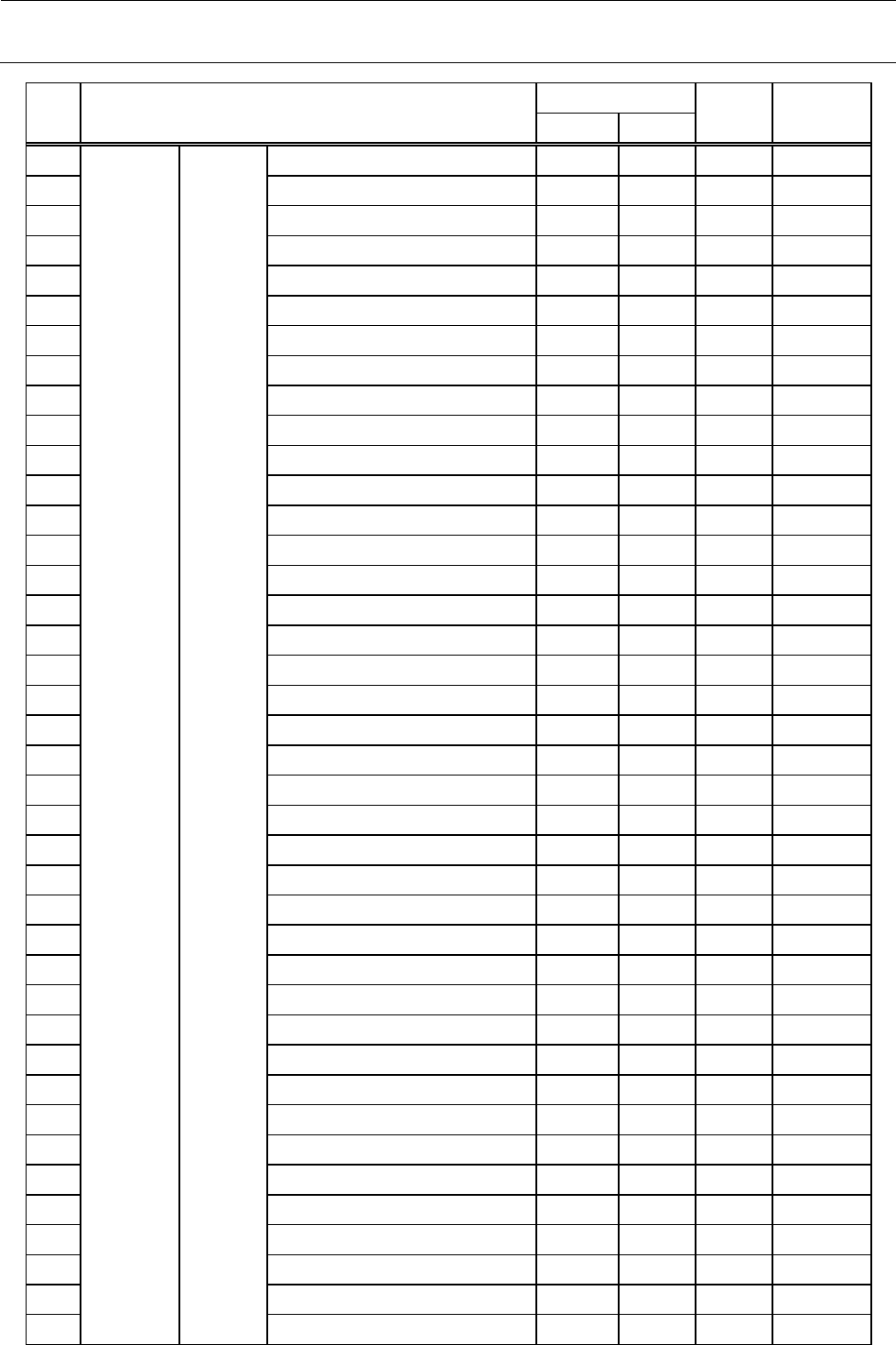
机器控制参数
2-46
No.
项目
输入范围
单位
备考
最小值
最大值
160 厂商设置用
161 厂商设置用
162 法向轴向上退避时限制速度
163 法向轴向上退避时时间常数
164 功能选择C-C
165 厂商设置用
166 厂商设置用
167 厂商设置用
168 厂商设置用
169 厂商设置用
170 厂商设置用
171 厂商设置用
172 厂商设置用
173 厂商设置用
174 厂商设置用
175 厂商设置用
176 厂商设置用
177 厂商设置用
178 厂商设置用
179 厂商设置用
180 厂商设置用
181 厂商设置用
182 厂商设置用
183 厂商设置用
184 厂商设置用
185 厂商设置用
186 厂商设置用
187 厂商设置用
188 厂商设置用
189 厂商设置用
190 厂商设置用
191 厂商设置用
192 厂商设置用
193 厂商设置用
194 厂商设置用
195 厂商设置用
196 厂商设置用
197 厂商设置用
198 厂商设置用
199 厂商设置用