00196496-07_SM_SX12DX12_Kunde_de.pdf - 第262页
Einstellarbeiten Einstellungen an der Elektrik und Steuerung 4.3.5 DIP-Schalter am CAN-Switch einstellen 262 Serviceanleitung SIPLACE SX1/SX2/DX1/DX2 FS02 DIP-Schalter S1 im C AN-Switch [03083844-xx] Mit der Einstellung …
Einstellarbeiten
4.3.5 DIP-Schalter am CAN-Switch einstellen Einstellungen an der Elektrik und Steuerung
Serviceanleitung SIPLACE SX1/SX2/DX1/DX2 FS02 261
► Starten Sie die Maschine neu und überprüfen Sie in der Betriebssystemebene ob der CAN Treiber
korrekt installiert wurde bzw. die Firmware und die Seriennummer erkannt wurden.
4.3.5
4.3.5 DIP-Schalter am CAN-Switch einstellen
DIP-Schalter am CAN-Switch einstellen
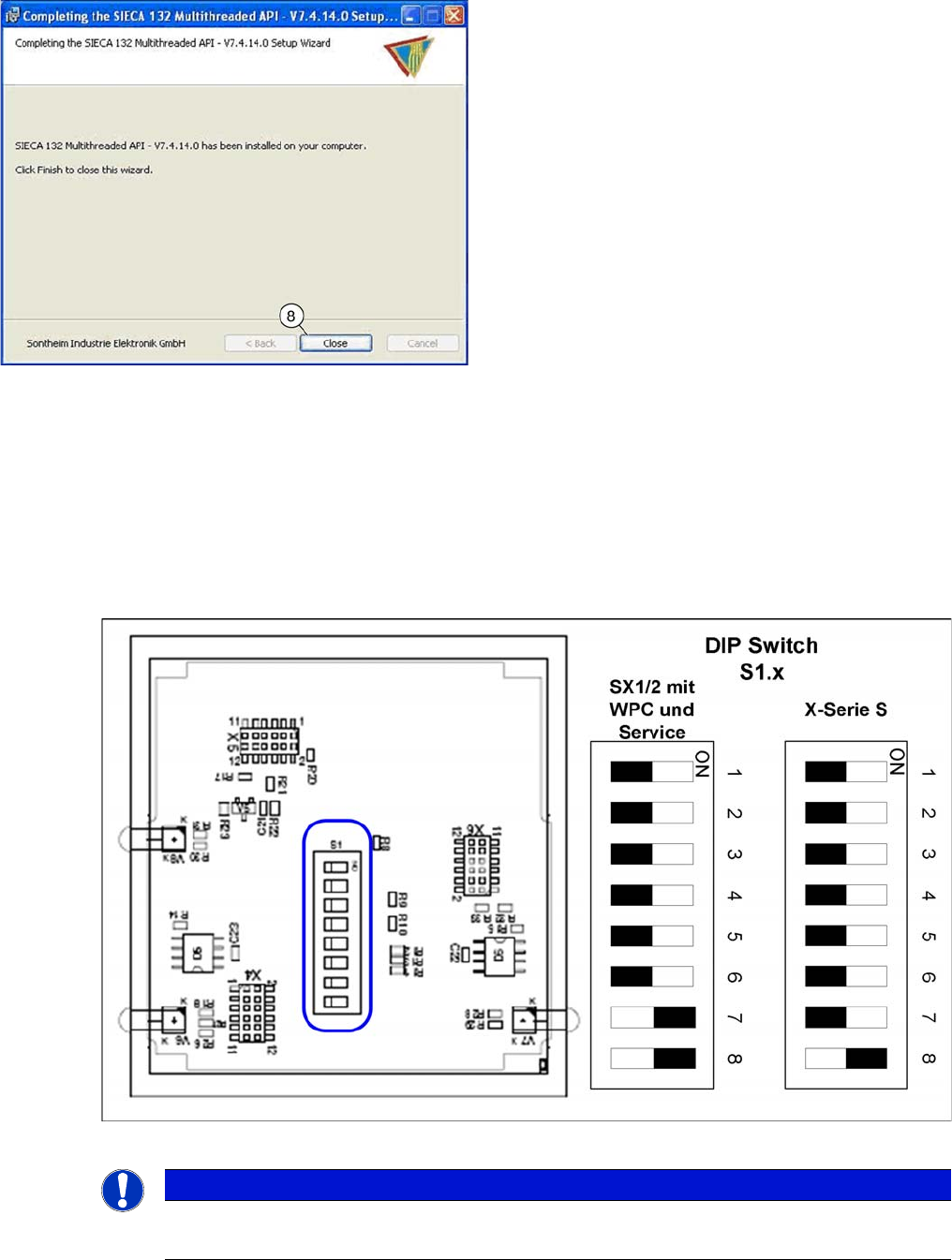
► Trennen Sie den CAN-Switch von der Spannungsversorgung.
► Lösen Sie die beiden Befestigungsschrauben des Oberteils (Seite mit Aufkleber) und nehmen Sie
dieses ab.
► Stellen Sie die DIP-Schalter ein:
Platine im CAN-Switch [03083844-xx]
► Die Installation ist beendet, klicken Sie auf den But
-
ton „Close“ (8) um den Installations-Wizard zu
schließen.
HINWEIS
Standardeinstellung
Der CAN-Switch ist standardmäßig für die X-Serie S voreingestellt.
Einstellarbeiten
Einstellungen an der Elektrik und Steuerung 4.3.5 DIP-Schalter am CAN-Switch einstellen
262 Serviceanleitung SIPLACE SX1/SX2/DX1/DX2 FS02
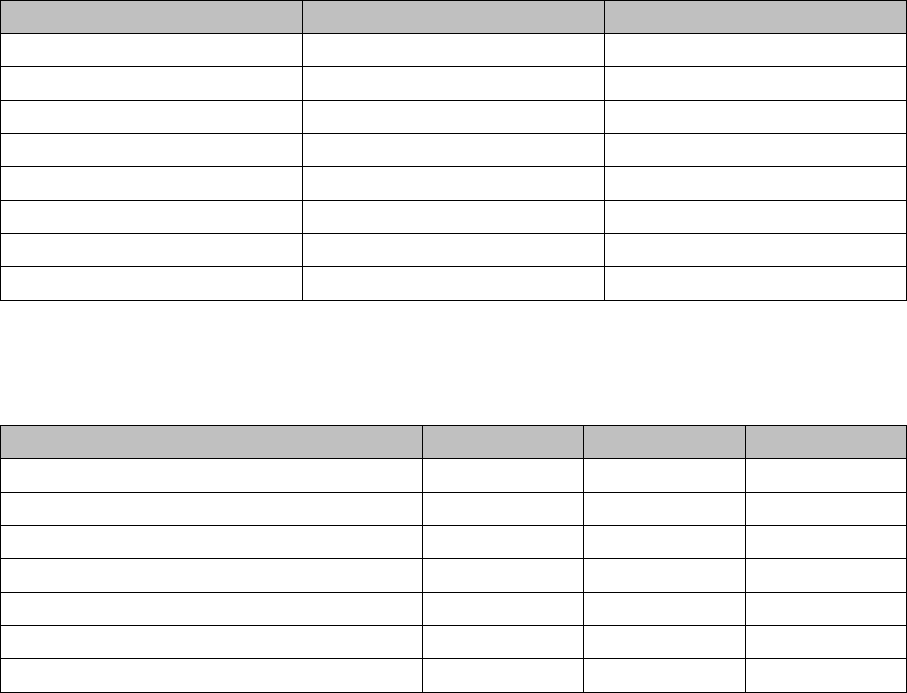
DIP-Schalter S1 im CAN-Switch [03083844-xx]
Mit der Einstellung der DIP-Schalter S1.3 bis S1.5 kann die Anzeige (LED) konfiguriert werden, d. h. ab
wie viel Error Frames die LED ihren Status von Grün auf Rot wechselt. Die Standardeinstellung ist, dass
bei jedem empfangenen Error-Frame die LED rot wird.
LED-Status Error-Frames
DIP-Schalter S1 ON OFF
S1.1 Testbetrieb Normaler Betrieb
S1.2 500 kBaud 1 MBaud
S1.3 Siehe Tabelle unten Siehe Tabelle unten
S1.4 Siehe Tabelle unten Siehe Tabelle unten
S1.5 Siehe Tabelle unten Siehe Tabelle unten
S1.6 ASC Test EIN ASC Test AUS
S1.7 120 Ohm CAN 1 Kein Abschlusswiderstand
S1.8 120 Ohm CAN 2 Kein Abschlusswiderstand
LED-Status S1.3 S1.4 S1.5
1 Error-Frame OFF OFF OFF
5 Error-Frames / Minute ON OFF OFF
10 Error-Frames / Minute OFF ON OFF
10 Error-Frames / Stunde ON ON OFF
50 Error-Frames / Stunde OFF OFF ON
100 Error-Frames / Stunde ON OFF ON
500 Error-Frames / Stunde OFF ON ON
Einstellarbeiten
4.4.1 Verfahrbereiche und Geschwindigkeitsüberwachung Einstellungen am Portal
Serviceanleitung SIPLACE SX1/SX2/DX1/DX2 FS02 263
4.4
4.4 Einstellungen am Portal
Einstellungen am Portal
Sehen Sie dazu auch...
5.2.1 Kopfinterface C700B [03055072-xx] [ ➙ 309]
4.4.1
4.4.1 Verfahrbereiche und Geschwindigkeitsüberwachung
Verfahrbereiche und Geschwindigkeitsüberwachung
Der Verfahrbereich der X- und Y-Achsen wird mit Hilfe der Software automatisch ermittelt.
4.4.2
4.4.2 Anticrash-Funktion
Anticrash-Funktion
Die Anticrash-Funktion wird über die Software der GCU realisiert.
4.4.2.1
4.4.2.1 Aufgaben der Anticrash-Funktion
Aufgaben der Anticrash-Funktion
▪ Überwachung der Verfahrbereiche X- und Y-Achse
Auswertung der Ist-Position der jeweiligen Achse in Richtung der Puffer, abhängig von der Ge
-
schwindigkeit.
▪ Überwachung des Abstandes beider Y-Achsen in einem Bestückbereich
Auswertung der Ist-Position des eigenen Portals und des Partnerportals bei der Portalcrash-
Überwachung.
▪ Zählfehlerüberwachung der Portalachse
Überwachung der eingehenden Zählimpulse (Flankenüberwachung), in Abhängigkeit von der Zeit.
4.4.2.2
4.4.2.2 Ablauf der Anticrash-Überwachung
Ablauf der Anticrash-Überwachung
Die Aktivierung der Anticrash-Funktion erfolgt nachdem die X-/Y-Achsen referiert wurden. Beim erstma
-
ligen Referenzieren der Portalachsen ist die Anticrash-Überwachung nicht aktiv, was durch die geringe
Verfahrgeschwindigkeit unkritisch ist.
Danach wird das Bit für die Anticrash-Überwachung gesetzt und über den FDB (Fast-Drive-Bus). Es er
-
folgt eine ständige Kommunikation und Synchronisation über die Ist-Positionen des Partnerportals, aus
-
genommen beim Bestückmodus I-Placement. In diesem Fall arbeiten beide Portale völlig unabhängig.
Folgende Informationen werden zwischen den Y-Achsen ausgetauscht:
▪ Ist-Position und Geschwindigkeit des eigenen Portals
▪ Statusinformationen (Referierzustand, Zustand der Anticrash-Überwachung).
4.4.2.3
4.4.2.3 Fehler "Portalcrash"
Fehler "Portalcrash"
Die Bestimmung des Fehlers “Portalcrash” erfolgt aus der Positions- und der Geschwindigkeitsdifferenz
beider Achsen. Der Fehler Portalcrash wird von der GCU über den FDB gemeldet. Bei beiden Achsen
wird der Servo (GCU) freigeschaltet und es müssen beide erneut referiert werden.
4.4.2.4
4.4.2.4 Zählfehler
Zählfehler
Wird über die GCU ein "Fataler Zählfehler" erkannt, wird die betroffene Achse freigeschaltet und die An
-
ticrash-Funktion deaktiviert. Dies bekommt die andere Achse über die Statusinformation mit und deak
-
tiviert die Anticrash-Funktion. Die freigeschaltete Achse muss neu referiert werden.
Danach wird die Anticrash-Funktion für beide Achsen wieder aktiviert.