Schmtic_GPX_07_.pdf - 第152页
Downloaded at 2010/04/07 18:31 JST by 3PYM4216 DL#jdS6Xojc 本図 ( 1 外付麵八私 - A f 刀仕様奸 - 夕 F 3 M 2 ( D O P - 3 0 0 S A : X P 0 0 5 3 0 ) t 心 A ' _ 夕 F 3 I V 2 ( F R E 0 . 4 C I E - 2 J : 麗 _ ) _ 合 ■ 場合 0 ) 設定村 。 注 ) 周波数…
Downloaded at 2010/04/07 18:31 JST by 3PYM4216 DL#jdS6Xojc
本國
1
内蔵八牛
2
-
B
K
T
仕様奸
-
夕
F
3
M
1
(
D
A
P
-
1
2
S
:
H
5
U
7
1
)
匕
心八
-
夕
F
3
I
V
1
(
F R E
0.4
C I E
-
2
J
:
剛
_
)
_
合
⑽
場制設定技
。
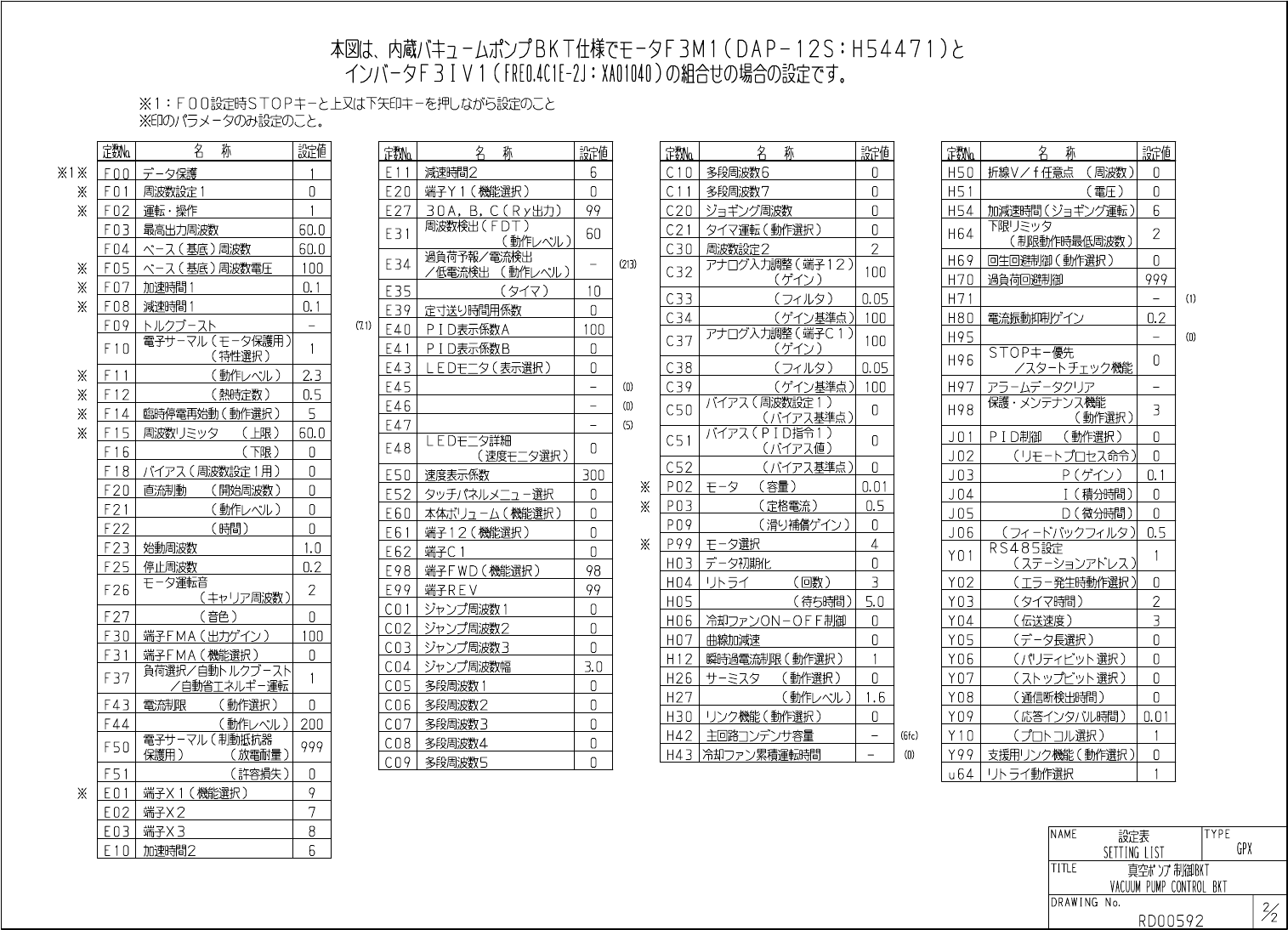
※
^
:
F
00
設定時
STOP
牛一
t
上又
(
J
下 矢 印 汔 押
UcW
5
設定
①
Ct
※
印
①
/
\
°
5
〆一夕
①
办設定
①
Ct
。
FT
m
a
名称
Mi
名称
Mi
名称
I
£
i
m
m
減速雕
2
折線
V
/
干任意点
(
周波数
)
多段周波数
5
※
以
E
1 1
6
C
10
0
H
50
0
芋一夕保請
mn
端子丫
1
(
機能選択
)
(
電圧
)
周灘淀
1
多段周波数
7
F
01
0
E
20
0
C
1
1
0
H
51
0
運転
操作
30
A
,
B
,
C
(
Ry
出力
)
夕日半
、
夕
'
周波数
加減速時間半
:
^
'
運転
)
F
02
E
27
99
C
20
0
H
54
6
周波数検出
(
FDT
)
下限
1
J
三夕夕
(
制限動作時最低周波数
)
夕
<
7
運転
(
動作選択
)
最高出力周波数
F
03
60.0
C
21
0
E
31
60
H
64
2
(
動作
UD
久一又
(
基底
)
周波数
F
04
周波数設定
2
60.0
C
30
2
過負荷予報
/
電流検出
/
低驗検出
(
動作
UD
回生回避制御
(
動作選択
)
H
69
0
打
□
夕
、
入力調整
(
端子
12
)
E
34
-
(
213
)
~
一又
(
基底
)
周波数電圧
%
F
05
100
C
32
100
過負鋼避制御
H
70
999
加速時間
1
F
07
0.1
(
夕
<
7
)
E
35
10
儿夕
)
C
33
0.05
H
71
⑴
減速時間
1
F
08
0.1
定寸送
4
時間用係数
E
39
0
(
亇心
点
)
電流振動抑制亇心
C
34
100
H
80
0.2
t
]
l
22
~
2
t
F
09
(
7.1
)
PID
表示係数
A
E
40
100
打
□
夕
'
入力調整
(
端子
C
1
)
(
啊
>
)
H
95
⑼
電子廿一
7
儿
(
石
_
夕保護用
)
(
特住選択
)
C
37
100
PID
表示係数
B
F
10
E
41
0
STOP
牛
-
優先
/
又夕一卜于工
9
夕機能
H
96
0
LED
石二夕
(
表示選択
)
儿夕
)
E
43
0
C
38
0.05
※
F
1
1
2.3
(
70
基準点
)
尹一夕夕
1
J
77
E
45
C
39
100
H
97
(
0
)
(
熱時定数
)
F
12
0.5
八
<
7
又
(
周波数設定
1
)
OiizziMl
W
^
y
^
ryjM
(
動作選択
)
E
46
(
0
)
C
50
H
98
3
0
臨時停電再始動
(
動作選択
)
F
14
5
E
47
⑸
周 三
、
夕 夕
(
上 限
)
八介
;
UP
ID
指令
1
)
(
八
<
7
又値
)
60.0
F
15
PID
制御
(
動讎択
)
J
01
0
LED
^
Z
夕詳細
C
51
0
E
48
0
(
下限
)
F
16
0
(
速度石二夕選択
)
⑴
乇
-
卜犮口乜又命令
)
J
02
0
(
八
1
^
又
点
)
C
52
0
又
(
周波数設定
1
用
)
F
18
0
速度表示係数
P
(
亇心
)
E
50
300
J
03
0.1
石
夕
(
容 量
)
※
P
0 2
0.01
直織慟
(
開始周波数
)
F
20
0
I
(
積分雕
)
夕夕于八本儿〆二
IL
一選択
J
04
E
52
0
0
(
定格電流
)
P
03
0.5
※
F
21
0
本体求
U
]
-
厶
(
機能選択
)
D
(
微分雕
)
E
60
0
J
05
0
(
滑
。
J
補償
7
心
)
P
09
0
(
時間
)
F
22
0
端子
12
(
機能選択
)
E
61
J
06
0
0.5
乇一夕選択
P
99
4
始動周波数
F
23
RS
485
設定
(
又亍一夕彐
1.0
端子
C
1
E
62
0
Y
01
T
一夕
?
刀
M
匕
H
03
0
停止周波数
F
25
0.2
端子
FWD
(
繼選択
)
E
98
98
石一夕運転音
(
回数
)
(
工
5
-
発生時動作選択
)
H
04
U
卜
3
Y
02
0
端子
REV
F
26
E
99
99
2
(
牛 周 波 数
)
(
待觸間
)
(
夕
<
7
雕
)
H
05
5.0
Y
03
2
9
艾周波数
1
C
01
0
(
音色
)
F
27
0
冷却
D
尸
>
0
N
-
0
FF
制御
(
伝送速度
)
H
06
Y
04
0
3
周波数
2
C
02
0
端子
FMA
(
出力
F
30
100
曲線加減速
(
7
'
-
夕長選択
)
H
07
0
Y
05
0
周波数
3
C
03
0
端子
FMA
(
機能選択
)
F
31
0
瞬時過電流制限
(
動作選択
)
(
八
力亍彳匕以卜選択
)
丫
06
H
12
0
夕周波数幅
C
04
3.0
負荷選択
/
自動卜儿夕艾一又卜
/
自動省工为
tf
-
運転
廿一三又夕
(
動作選択
)
(
又卜
、
以匕外選択
)
H
26
F
37
0
Y
07
0
多段周波数
1
C
05
0
(
動作
UD
(
通信断検出時間
)
1.6
丫
08
H
27
0
電綱限
(
動備択
)
多段周波数
2
F
43
C
06
0
0
機能
(
動作選択
)
(
応答
O
夕
A
'
儿時間
)
Y
09
H
30
0
0.01
(
動作
U
4
)
多段周波数
3
F
44
200
C
07
0
(
尤卜
]
儿選択
)
主 回 路 廿 容 量
H
42
丫
1 0
(
6
fc
)
電子廿
-
7
儿
(
制動抵抗器
保護用
)
多段周波数
4
C
08
0
999
F
50
支援用
iJ
:
^
機能
(
動作選択
)
(
放電耐量
)
冷却了尸
>
累積運転時間
H
43
丫
99
0
(
0
)
多段周波数
5
C
09
0
(
許容損失
)
U
卜
{
乍 選 択
u
6 4
F
5 1
0
端子
X
1
(
癱選択
)
E
01
9
端子
X
2
E
02
7
端子
X
3
E
03
8
NAME
設定表
TYPE
GPX
加速時間
2
E
10
6
SETTING
LIST
TITLE
真空
W
制綱
KT
VACUUM
PUMP
CONTROL
BKT
DRAWING
No
.
RD
0
Q
592

Downloaded at 2010/04/07 18:31 JST by 3PYM4216 DL#jdS6Xojc
本図
(
1
外付麵八私
-
Af
刀仕様奸
-
夕
F
3
M
2
(
DOP
-
300
SA
:
XP
00530
)
t
心
A
'
_
夕
F
3
I
V
2
(
FRE
0.4
CIE
-
2
J
:
麗
_
)
_
合
■
場合
0
)
設定村
。
注
)
周波数在矢印牛
-
Izr
6
0
H
Z
匚設定
Lr
下
NAME
設定表
TYPE
GPX
SETTING
LIST
TITLE
外付基栃
rtriv
1
O
7
B
0
X
BOARD
VACUUM
PUMP
BOX
DRAWING
No
.
RD
01510
Luudnos
o
o
o
o
is
D
E
D
=
=
=
DDI
=
IDD
=
=
D
DDD
=
=
=
I
1
0
昌吾
DDDDDDDDDDDDI
DDDIDDDDD
=
D
0
I
1

Downloaded at 2010/04/07 18:31 JST by 3PYM4216 DL#jdS6Xojc
本図
(
t
外付基板
A
'
牛
i
仕様奸
-
夕
F
3
M
2
(
DOP
-
300
SA
:
XP
00530
)
^
心八
-
夕
F
3
I
V
2
(
FRMIE
-
2
J
:
■
酬
)
_
合
■
場合
①
設定沈
(
注
1
)
※
彳部
、
F
00
①
設定
SSTO P
牛
-
t
上又
(
S
下矢印牛
-
汔押
UJ
:
tf
5
設定
①
Ct
(
注
2
一 夕 設 定
、
(
※
部
S
亍歹才儿卜値抒
5
①
変更
Lt
箇所
)
FT
m
a
名称
靈
名称
靈
名称
I
£
i
m
m
減速雕
2
折線
V
/
干任意点
(
周波数
)
多段周波数
5
※
以
E
1 1
6.0
C
10
0.00
H
50
0.0
芋一夕保請
mn
端子丫
1
(
機能選択
)
(
電圧
)
周灘淀
1
多段周波数
7
%
F
01
0
E
20
0
C
1
1
0.00
H
51
0
運転
操作
30
A
,
B
,
C
(
Ry
出力
)
夕日半
、
夕
'
周波数
加減速時間半
:
^
'
運転
)
%
F
02
E
27
99
C
20
0.00
H
54
6.00
周波数検出
(
FDT
)
下限
1
J
三夕夕
(
制限動作時最低周波数
)
夕
<
7
運転
(
動作選択
)
最高出力周波数
F
03
60.0
C
21
0
E
31
60.0
H
64
2.0
(
動作
UD
~
一又
(
基底
)
周波数
F
04
周波数設定
2
60.0
C
30
2
過負荷予報
/
電流検出
/
低驗検出
(
動作
UD
回生回避制御
(
動作選択
)
H
69
0
打
□
夕
、
入力調整
(
端子
12
)
E
34
-
2.13
~
一又
(
基底
)
周波数電圧
%
F
05
220
C
32
100.0
過負鋼避制御
H
70
999
加速時間
1
F
07
0.1
(
夕
<
7
)
E
35
10.00
儿夕
)
C
33
0.05
H
71
減速時間
1
F
08
0.1
定寸送
4
時間係数
E
39
0.000
(
亇
O
基準点
)
100.0
電流振動抑制亇心
C
34
H
80
0.20
Nk
22
zZh
F
09
7.1
PID
表示係数
A
E
40
100
打
□
夕
'
入力調整
(
端子
C
1
)
(
啊
>
)
直流
1
慟
(
特住選択
)
H
95
0
電子廿一
7
儿
(
石
_
夕保護用
)
(
特住選択
)
C
37
100.0
PID
表示係数
B
F
10
E
41
0.00
STOP
牛
-
優先
/
又夕一卜于工
9
夕機能
H
96
0
LED
石二夕
(
表示選択
)
儿夕
)
E
43
0
C
38
0.05
F
1
1
2.3
(
亇
Q
基準点
)
100.0
尹一夕夕
1
J
77
E
45
C
39
H
97
0
(
熱時定数
)
F
12
0.5
八
<
7
又
(
周波数設定
1
)
OiizziMl
W
^
y
^
ryjM
(
動作選択
)
E
46
C
50
H
98
3
0.00
臨時停電再始動
(
動作選択
)
F
14
5
E
47
周 三
、
夕 夕
(
上 限
)
八介
;
UP
ID
指令
1
)
(
八
<
7
又値
)
60.0
F
15
PI D
制 御
(
動 讎 択
)
J
0 1
0
LED
^
Z
夕詳細
C
5 1
0.00
E
4 8
0
(
下限
)
F
1 6
0.0
(
速度石二夕選択
)
⑴
乇
-
卜犮口乜又命令
)
J
02
0
(
八
1
^
又
点
)
C
52
0.00
又
(
周波数設定
1
用
)
F
18
0.00
速度表示係数
P
(
亇心
)
E
50
30.00
J
03
0.100
石
夕
(
容 量
)
※
P
02
0.4
直織慟
(
開始周波数
)
F
20
0.0
夕
7
于八本儿
(
石一卜
"
選択
)
I
(
積分雕
)
J
04
E
52
0
0.0
(
定格電流
)
※
P
03
2.3
F
21
0
本体水
U
]
-
厶
(
機能選択
)
D
(
微分雕
)
E
60
0
J
05
0.00
(
滑
。
J
補償
7
心
)
P
09
0.0
(
時間
)
F
22
0.00
端子
12
(
機能選択
)
E
61
J
06
0
0.5
P
14
0.00
始動周波数
F
23
RS
485
設定
(
又亍一夕彐
1.0
端子
C
1
E
62
0
Y
01
乇一夕選択
P
99
4
停止周波数
F
25
0.2
端子
FWD
(
繼選択
)
E
98
98
石一夕運転音
x
-
夕
?
刀制匕
(
工
5
-
発生時動作選択
)
H
03
0
Y
02
0
端子
REV
F
26
E
99
99
2
(
牛 周 波 数
)
(
回数
)
(
夕
<
7
雕
)
H
04
U
卜
3
Y
03
2.0
9
艾周波数
1
C
01
0.0
(
音色
)
F
27
0
(
待摘間
)
(
伝送速度
)
Y
04
H
05
5.0
3
周波数
2
C
02
0.0
端子
FMA
(
出力
F
30
100
冷却
D
尸
>
ON
-
OFF
制御
(
7
'
-
夕長選択
)
H
06
0
Y
05
0
周波数
3
C
03
0.0
端子
FMA
(
機能選択
)
F
31
0
曲線加減速
(
八
力亍彳匕以卜選択
)
丫
06
H
07
0 0
夕周波数幅
C
04
3.0
負荷選択
/
自動卜儿夕艾一又卜
/
自動省工为
tf
-
運転
瞬時過電流制限
(
動作選択
)
(
又卜
、
以匕外選択
)
F
37
H
12
Y
07
0
多段周波数
1
C
05
0.00
廿一三又 夕
(
動作選択
)
(
通信断検出時間
)
H
26
丫
08
0 0
電綱限
(
動備択
)
多段周波数
2
F
43
C
06
0
0.00
(
動作
bD
(
応答
O
夕
A
'
儿時間
)
1.60
Y
09
H
27
0.01
(
動作
U
4
)
多段周波数
3
F
44
200
C
07
0.00
機能
(
動作選択
)
(
尤卜
]
儿選択
)
H
30
0
丫
1 0
電子廿
-
7
儿
(
制動抵抗器
保護用
)
多段周波数
4
C
08
0.00
999
F
50
容量旧
(
放電耐量
)
主回路
]
>
于
>
廿
支援用
iJ
:
^
機能
(
動作選択
)
H
42
丫
99
0
)
多段周波数
5
C
09
0.00
(
許容損失
)
冷 却 累 積 運 転 時 間
U
卜
{
乍 選 択
H
4 3
※
u
6 4
F
5 1
Q
.
0
Q
0
0000
端子
X
1
(
癱選択
)
※
E
01
9
端子
X
2
E
02
7
端子
X
3
E
03
8
NAME
設定表
TYPE
GPX
加速時間
2
E
10
6.0
SETTING
LIST
TITLE
外付基栃
rtriv
1
O
7
B
0
X
BOARD
VACUUM
PUMP
BOX
DRAWING
No
.
RDQ
151
Q