COMPONENT-DATABASE_INM.pdf - 第166页
6- 67 6-2- 49 图像 6-2- 49 -1 图像元件 ( 主 ) 图像元件主画面,用于输入图像元件的条件项目。 项目 内容 引脚间距 宽度 输入横方向引脚间距。 输入范围因元件类型而 不 同( 当元件类型为 PLCC(QFJ) 、 SOJ 时, 默认为 1.27mm ,除 此 以外默认为空白) 。 引脚间距 长度 输入纵方向引脚间距。 输入范围因元件类型而不同(默认为空白) 。 引脚长度 输入引脚接触基板部分的长度。 输入范…
6-66
元件插入异常检测功能 (JM-50-100 系列)
项目
内容
元件插入异常检测功能
(JM-50-100 系列)
是
/
否
对
JM-50-100
系列用单选框选择是否执行元件插入异常检测。
仅元件类型为「插入元件」或「INS 电解电容器」时可以进行选择。
默认值为「否」。
正常判定范围
根据在
JM-50-100
系列取得的数据设定正常判定范围。
正常的扭矩率值加上指定值所得的值为正常判定范围的上限,减去指定值所
得的值为正常判定范围的下限。
取得数据状况
表示扭矩率的取得状况。显示未取得
/
取得。
多针引脚矫正
项目
内容
多针引脚矫正
是/否
通过单选按钮选择是否实施多针引脚矫正。
元件种类为「插入元件」,使用图像对中心,在实施全部元件(要素)数据的
引脚检查时可以进行选择。
默认值为「否」。
工夹具编号
在元件数据库不能变更。
默认值为「未设置」。
6-67
6-2-49 图像
6-2-49-1 图像元件(主)
图像元件主画面,用于输入图像元件的条件项目。
项目
内容
引脚间距 宽度
输入横方向引脚间距。
输入范围因元件类型而不同(当元件类型为 PLCC(QFJ)、SOJ 时,默认为 1.27mm,除 此
以外默认为空白)。
引脚间距 长度
输入纵方向引脚间距。
输入范围因元件类型而不同(默认为空白)。
引脚长度
输入引脚接触基板部分的长度。
输入范围因元件类型而不同(默认为空白)。
引脚(球面)宽度
输入引脚宽度。球面时,输入球面的直径。
输入范围因元件类型而异(默认值,元件类型为 SOP,HSOP,SOJ,QFP,PLCC(QFJ)
,
PQFP(BQFP),TSOP,TSOP2,单向连接器,双向连接器,Z 引脚连接器,J
引脚插座,
鸥翼式插座,带减震器的插座时为
0.00mm
,其他为空白)。
引脚数
引脚元件时输入引脚数。
球面元件时输入外周球面数。
上下左右有不同的球面数时数量多的有效。
输入范围因元件类型而异。
最大值,元件类型为
BGA
时为
51
,为
FBGA
时为
160
,其他为
384
(默认为空白)。
开始1~3
输入缺少的引脚位置。
输入范围为
0
~引脚数量(默认值:
0
)。
欠缺数 1~3
输入缺少的引脚数量。
输入范围为
0
~引脚数量(默认值:
0
)。
按钮
内容
图像控制数据 编辑
显示照明控制数据画面。
元件查看器
元件类型为「通用图像」「插入元件」时,显示元件查看器画面。
元件
元件类型为「通用图像」「插入元件」时,显示元件数据画面。
6-68
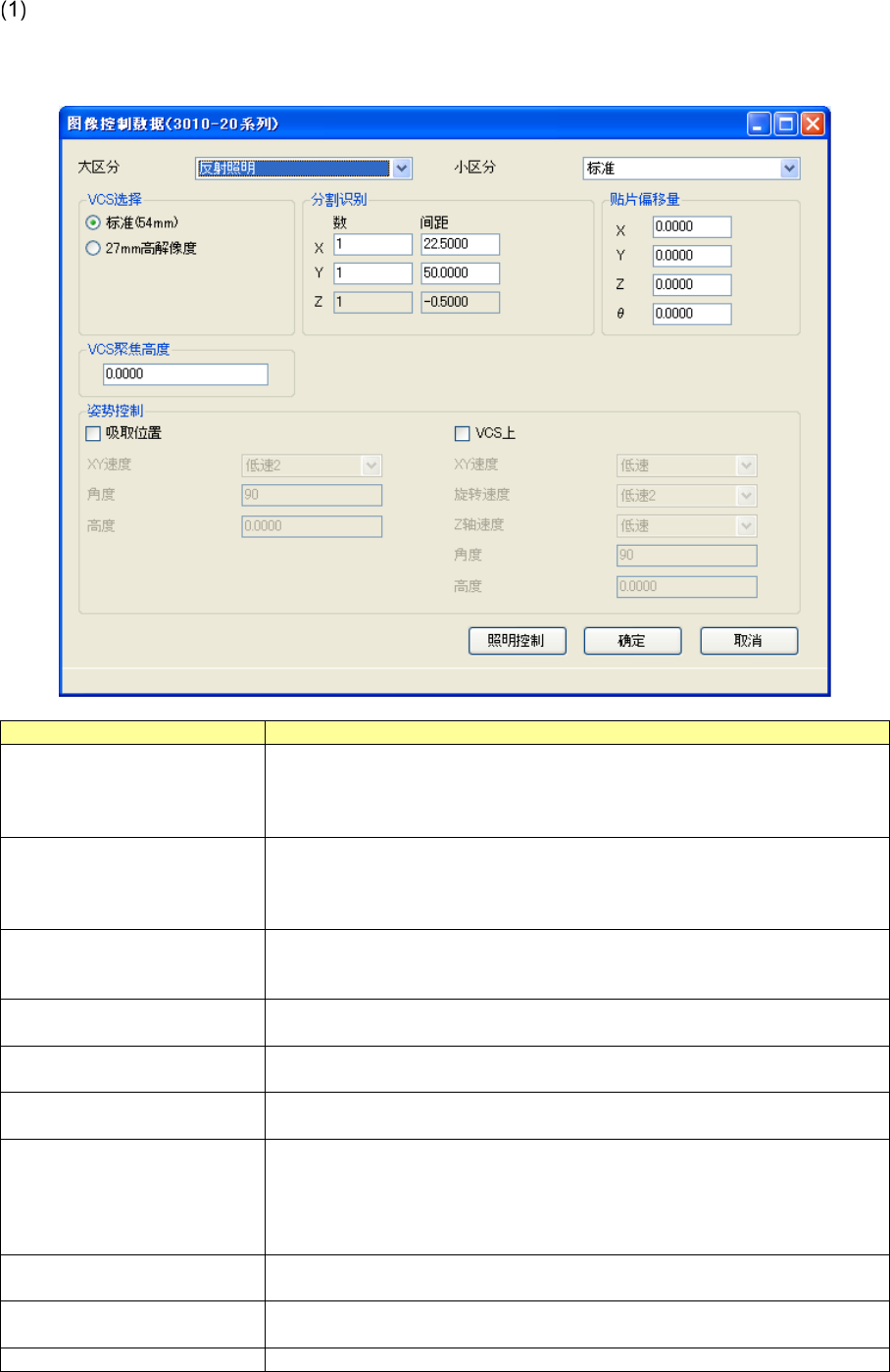
图像控制数据(3010-20 系列)
图像控制数据画面,用于设置图像识别时的动作详细数据。
在图像画面的图像控制数据上单击「编辑」按钮即可显示。
项目
内容
大区分
从组合框选择照明种类。
从「反射照明」「 透射照明」「 侧面照明」中选择。
元件类型为 BGA,FBGA 时默认为「侧面照明」。
其他元件类型时默认为「反射照明」。
小区分
从组合框选择照明的详细类型。
反射照明时,从「标准」(默认)「CBGA」「 LGA」中选择。
侧面照明时,从「红色侧面照明」「 蓝色侧面照明」中选择。
默认为空白。
分割识别
分割数
输入分割识别时的
X
,
Y
,
Z
分割数。
分割数的范围为 X(1~2),Y(1~3),Z(1~2)。(但 Z 不能编辑)
默认值为
X(1)
,
Y(1)
,
Z(1)
。
分割识别
间距
输入 VCS 的移动距离。机型不同输入范围也不同。
VCS 选择
用单选按钮选择
VCS
的种类。
按机型显示可选择的
VCS
。
VCS 聚焦高度
输入
VCS
识别高度。
输入范围为
-2.0000
~
2.0000
(默认值:
0
)。
贴片偏移量
X
,
Y
,
Z
,
θ
输入贴片时的元件的偏移量。
X 的输入范围为-99.00~99.00(默认值:0.00)
Y 的输入范围为-99.00~99.00(默认值:0.00)
Z 的输入范围为-10.00~10.00(默认值:0.00)
θ
的输入范围为
-3.00
~
3.00
(默认值:
0.00
)
姿势控制
吸取位置
设置吸取位置姿势时,选择复选框。
姿势控制
吸取位置
XY
速度
控制姿势的「吸取位置」复选框已勾选时,要从组合框选择控制姿势的速度。
从「超低速」
(
默认
)
,「低速」,「中速」,「高速」中选择。
姿势控制
控制姿势的「吸取位置」复选框已勾选时,要输入吸取后的姿势角度。