COMPONENT-DATABASE_INM.pdf - 第202页
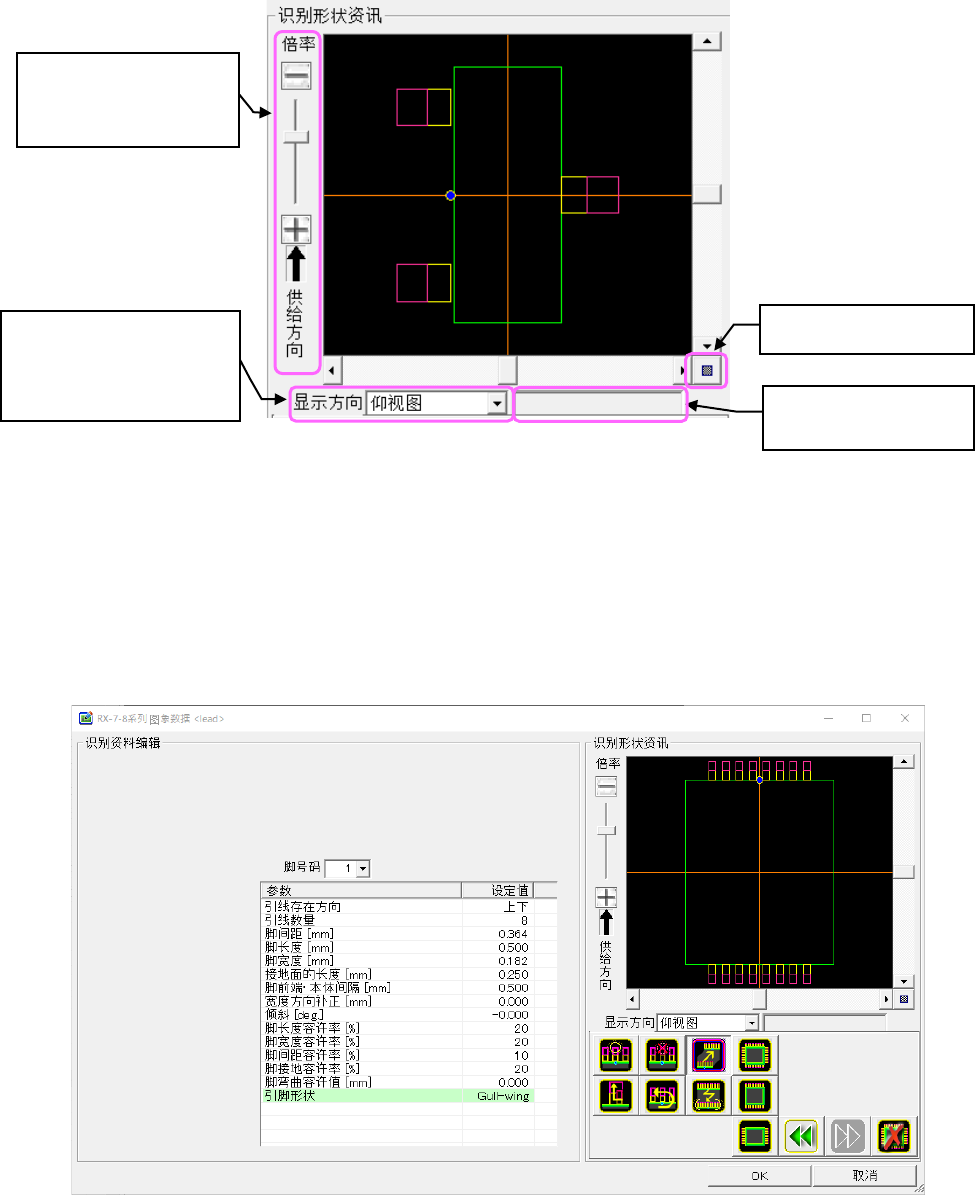
6- 103 6-2- 49 -3-2 识别形状资讯 6-2- 49 -3-3 芯片元件 编辑按钮为无效。 RX -7-8 系列无需进行图像数据的设定。 6-2- 49 -3-4 引脚元件 按下编辑按钮则显示以下所示的画面。 将显示移动至中心位置。 为现在鼠标光标所在的 X,Y 坐标。 元件的显示方向。 仰视图从元件下面 、 俯视图从 元件上面进行显示。 初始值为仰视图。 显示倍率。 以中心为基准对形状资讯 画面进行放大缩小。
6-102
RX-7-8 系列的选购项数据画面所显示的设定项目,如下所述各形状种类的均不同。
项目
芯片
元件
引脚
元件
BGA
元件
异形元件无
引脚
异形元件有
引脚
异形元件有
锡球
吸取位置偏离容许值 ○ ○ ○ ○ ○ ○
角度偏离容许值 ○ ○ ○ ○ ○ ○
本体对背景极性 - ○ ○ ○ ○ ○
球形的极性 - - ○ - - ○
本体辅助样本 - ○ ○ ○ ○ ○
球形外观的大小比 - - ○ - - ○
本体分数门槛 - - - ○ - -
在粗定位中利用本体 - ○ ○ - ○ ○
进行多余的脚的确定 - ○ - ○ ○ -
识别方法 ○ ○ ○ ○ ○ ○
统一括识别组编号 ○ ○ ○ ○ ○ ○
指定识别角度 ○ ○ ○ ○ ○ ○
识别角度 ○ ○ ○ ○ ○ ○
背面贴片检测 ○ ○ - - - -
6-103
6-2-49-3-2 识别形状资讯
6-2-49-3-3 芯片元件
编辑按钮为无效。
RX-7-8 系列无需进行图像数据的设定。
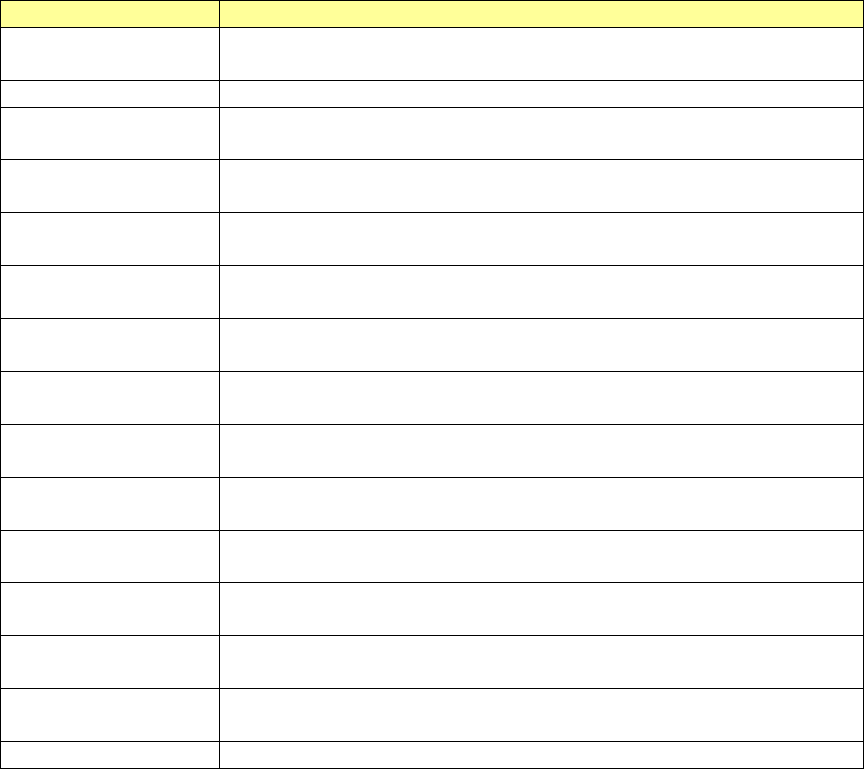
6-2-49-3-4 引脚元件
按下编辑按钮则显示以下所示的画面。
将显示移动至中心位置。
为现在鼠标光标所在的
X,Y 坐标。
元件的显示方向。
仰视图从元件下面
、俯视图从
元件上面进行显示。
初始值为仰视图。
显示倍率。
以中心为基准对形状资讯
画面进行放大缩小。
6-104
在引脚元件信息画面设定以下项目。
项目
备注
脚号码
可对以组为单位进行参数设定。
以下为以
1
组为单位进行的设定。
脚存在方向
设定引脚的存在方向。
脚数
输入引脚的根数。
输入范围为
1
~
999
。(默认值:
8
)
脚间距
输入引脚的中心间距。
输入范围为
0.001
~
99.999
。( 默认值:根据模型尺寸不同。)
脚长度
输入引脚的长度。
输入范围为
0.001
~
99.999
。( 默认值:根据模型尺寸不同。)
脚宽度
输入引脚的宽度。
输入范围为
0.001
~
99.999
。( 默认值:根据模型尺寸不同。)
接地面的长度
输入引脚与基板的接地面长度。
输入范围为
0.001
~
99.999
。( 默认值:
0.000
)
脚前端・本体间隔
输入引脚前端至模板的间隔。
输入范围为
-999.999
~
999.999
。( 默认值:根据模型尺寸不同。)
宽度方向补正
输入引脚的中心与元件中心的偏移量。
输入范围为
-999.999
~
999.999
。( 默认值:
0.000
)
脚长度容许率
输入对引脚长度的识别容许率。
输入范围为
1
~
99
。( 默认值:
20
)
脚宽度容许率
输入对引脚宽度的识别容许率。
输入范围为
1
~
99
。( 默认值:
20
)。
脚间距容许率
输入对引脚间距的识别容许率。
输入范围为
1
~
99
。( 默认值:
10
)
脚接地容许率
输入对引脚接地面的长度识别容许率。
输入范围为
1
~
99
。( 默认值:
20
)
脚弯曲容许值
以长度输入引脚前端部的弯曲容许值。
输入范围为
-999.999
~
999.999
。( 默认值:
0.000
)
脚形状
从「
Gull-wing
」「
J-lead
」中选择引脚形状。