00195738-0102_UM_X-Serie_SR605_KO.pdf - 第122页
3 장비에 대한 기술 데이터 사용자 매뉴얼 SIPLACE X-Series 3.5 실장 헤드 소프트웨어 버전 SR.605.xx 2008 년 7 월 한글판 122 그림 3.5 - 2 20 세그먼트 C ollect&Place 헤드 - 기능 그룹 , 파트 2 (1) 23 타입 (6x6) 디지털 C&P 컴포넌트 카메라 (2) 중간 분배기 보드 (3) 스타 모터 (4) 핸들 (5) 컴포넌…
사용자 매뉴얼 SIPLACE X-Series 3 장비에 대한 기술 데이터
소프트웨어 버전 SR.605.xx 2008 년 7 월 한글판 3.5 실장 헤드
121
3.5 실장 헤드
3.5.1 고속 실장을 위한 20 세그먼트 Collect&Place 헤드
그림 3.5 - 1 20 세그먼트 Collect&Place 헤드 - 기능 그룹 , 파트 1
(1) DP 드라이브 , 드라이브 20 개
(2) " 진공 센서 유지 회로 " 보드
(3) 픽업 / 실장 및 유지 회로에 있는 20 벤츄리 노즐용 압축 공기 연결
(4) 압력 조절 밸브 (7) 배출 공기 라인
(5) 반환 실린더
(6) Z 모터 ( 선형 모터 )
(7) 압력 조절 밸브
3 장비에 대한 기술 데이터 사용자 매뉴얼 SIPLACE X-Series
3.5 실장 헤드 소프트웨어 버전 SR.605.xx 2008 년 7 월 한글판
122
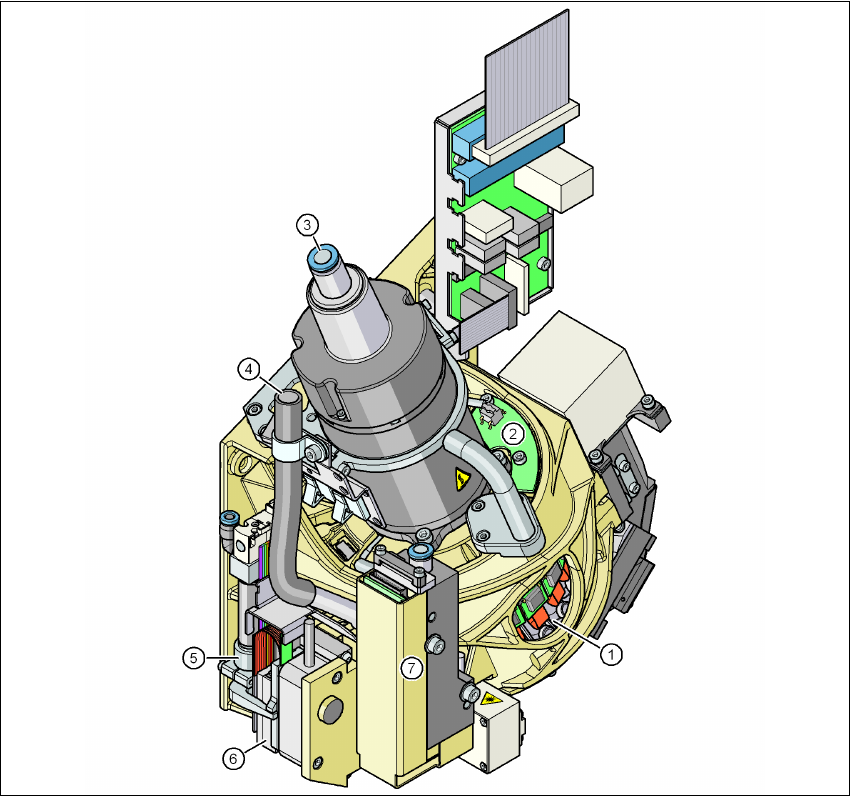
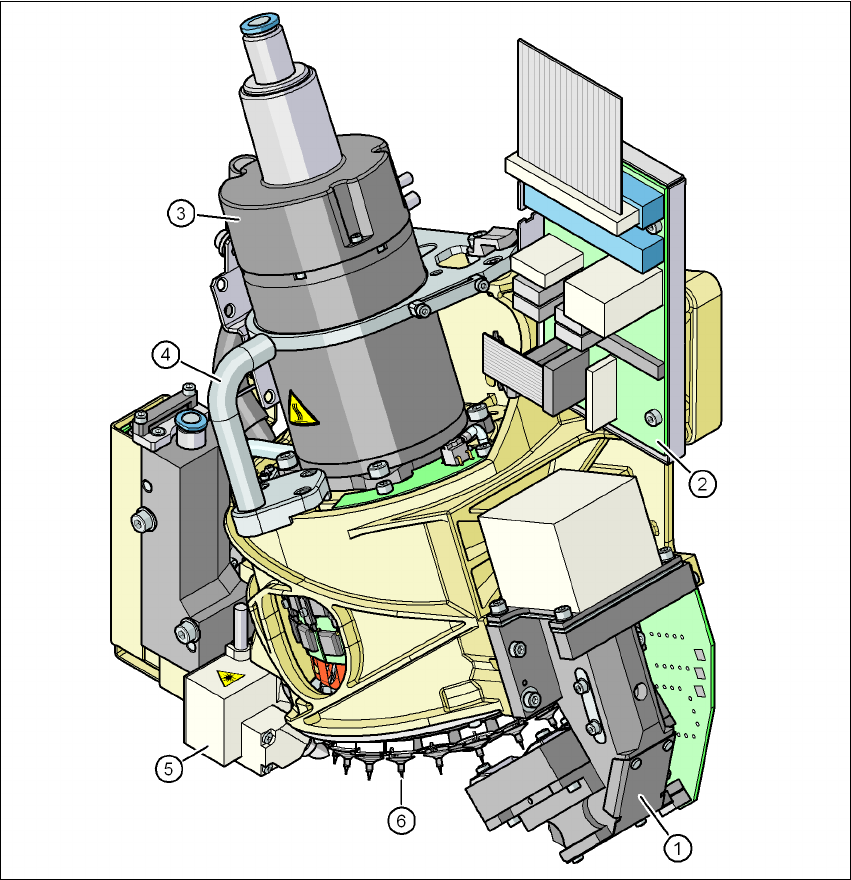
그림 3.5 - 2 20 세그먼트 Collect&Place 헤드 - 기능 그룹 , 파트 2
(1) 23 타입 (6x6) 디지털 C&P 컴포넌트 카메라
(2) 중간 분배기 보드
(3) 스타 모터
(4) 핸들
(5) 컴포넌트 센서
(6) 노즐이 20 개 있는 스타
사용자 매뉴얼 SIPLACE X-Series 3 장비에 대한 기술 데이터
소프트웨어 버전 SR.605.xx 2008 년 7 월 한글판 3.5 실장 헤드
123
3.5.1.1 설명
20 세그먼트 Collect&Place 헤드는 Collect&Place 원리로 작동합니다 . 이는 각 주기 동안 실장
헤드가 20 개의 컴포넌트를 픽업한다는 의미합니다 . 픽업 및 실장 위치에서 컴포넌트 센서는 노
즐에 컴포넌트가 있는지를 확인합니다 . 실장 위치로 이동하는 중에 컴포넌트는 광학적으로 센터
링되며 필요한 실장 각만큼 회전합니다 . 마지막으로 압착 공기가 해당 컴포넌트를 부드럽고 정
확하게 보드에 장착합니다 .
C&P20A 헤드는 실장 헤드의 출력을 크게 높이고 결과적으로 전체 실장기의 출력을 크게 높입니
다 . C&P20A 헤드의 소형화된 구조 덕분에 주기가 매우 짧습니다 . 이 경우 스타 축은 PCB 와 일
정한 각도를 유지합니다 . 이러한 구조 덕분에 여러 세그먼트를 매우 좁은 공간에 배치할 수 있습
니다 .
그러면서도 CO 카메라는 C&P20A 헤드에 통합되어 있습니다 . 따라서 외부 센터링 카메라로 이
동해야 하는 거리가 단축됩니다 . 또한 각 세그먼트마다 노즐을 회전시키는 별도의 DP 드라이브
가 있습니다 . 따라서 단일 헤드 스테이션에서는 노즐이 더 이상 정확한 위치로 회전되지 않습니
다 . 노즐은 언제라도 각기 개별적으로 필요할 때 실장 위치로 회전할 수 있습니다 .
각 세그먼트에 별도의 진공 장치가 하나씩 있습니다 . 따라서 진공과 공기 접촉 간의 전환 시간이
크게 단축됩니다 . 또한 이를 통해 각 노즐의 유지 회로에서 진공 상태를 점검할 수 있습니다 .
세그먼트의 Z 드라이브는 선형 경로 측정 시스템이 있는 선형 모터로 구현되기 때문에 대단히 정
확합니다 . 픽업 / 실장 위치에서 Z 드라이브는 세그먼트를 위 , 아래로 이동시킵니다 .