OM-1351-003_w.pdf - 第54页
6-5 Tg1356-ID-SO 0609-003 フィーダオルタネート フィーダオルタネート機能を使用するか、使用しないかを設定 します。 しない : フィーダオルタネート機能を使用しません。 する : フィーダオルタネート機能を使用します。 オルタネート Fdr No. “フィーダオルタネート”を“する”とした場合、部品吸着連続 異常が発生したときのオルタネート先の Fdr No. を設定します。 詳細については、本体取扱説明書“第…
6-4
Tg1356-ID-SO
0609-003
部品 ID
部品 ID を設定します。
[ ユニット 1] ~ [ ユニット 4] ボタンを選択すると、“FLUX.
UNIT#1”~“FLUX. UNIT#4”が設定されます。
C
コントロールコマンドを設定します。
注 意
以下に記載しているコントロールコマンド以外を使用すると、
そのステップは無効となります。
-( ハイフン ) : 部品配置データのステップとして扱わ
れます。
E : 部品配置データの終わりを示します。
そのステップは有効です。
S : 部品配置データとして、そのステップ
を無効にします。
X : 部品配置データとして、そのステップ
を無効にして、データの終わりを示し
ます。
コメント
各 Fdr No. ごとにコメントを設定します。
最大 32 文字の設定が可能です。
使用できる文字は、半角の英文字 / 数字および記号です。
ノート
(a) このコメントを設定しなくても装置の動作に影響はありま
せん。
(b) Fdr No. に対する部品の情報などを設定しておくと便利で
す。
フィーダ固定
フィーダ設置位置の固定を設定します。
フィーダ固定を“固定する”に設定した場合、部品の挿入 / 削
除操作をしても Fdr No. と部品 ID が固定されます。
しない : フィーダ位置を固定しません。
する : フィーダ位置を固定します。
6.1 パターンプログラム
6-5
Tg1356-ID-SO
0609-003
フィーダオルタネート
フィーダオルタネート機能を使用するか、使用しないかを設定
します。
しない : フィーダオルタネート機能を使用しません。
する : フィーダオルタネート機能を使用します。
オルタネート Fdr No.
“フィーダオルタネート”を“する”とした場合、部品吸着連続
異常が発生したときのオルタネート先の Fdr No. を設定します。
詳細については、本体取扱説明書“第 3 巻 3 章 1.4 部品配置
データ”を参照してください。
部品配置データ設定手順
手順
(1) “部品配置データ”タブシートでアイコン ( ) を押し、
“フィーダベース”タブシートをフラックス塗布ユニット
の設定可能状態にします。
(2) “フィーダベース”タブシートで、[ ユニット 1] ~ [ ユニッ
ト 4] ボタンを選択します。
(3) 設定したユニット No. に対して、“回転数 [ 回転 ]”を設定
します。
6.1 パターンプログラム
6-6
Tg1356-ID-SO
0609-003
6.1.2 トップ部品の部品ライブラリ“制御データ”の設定
ボトム部品のランド認識をするためのマーク座標を設定します。
•
パターンプログラムを以下のように設定します。
個々認識 = “する” + V データ = “11”に設定します。
(X1 ~ X2、FM2 は無効データ)
11 : 個々認識 (2 点認識 ) を行います。
ノート
本装置を使用する場合の“V データ”は“11”を設定します。
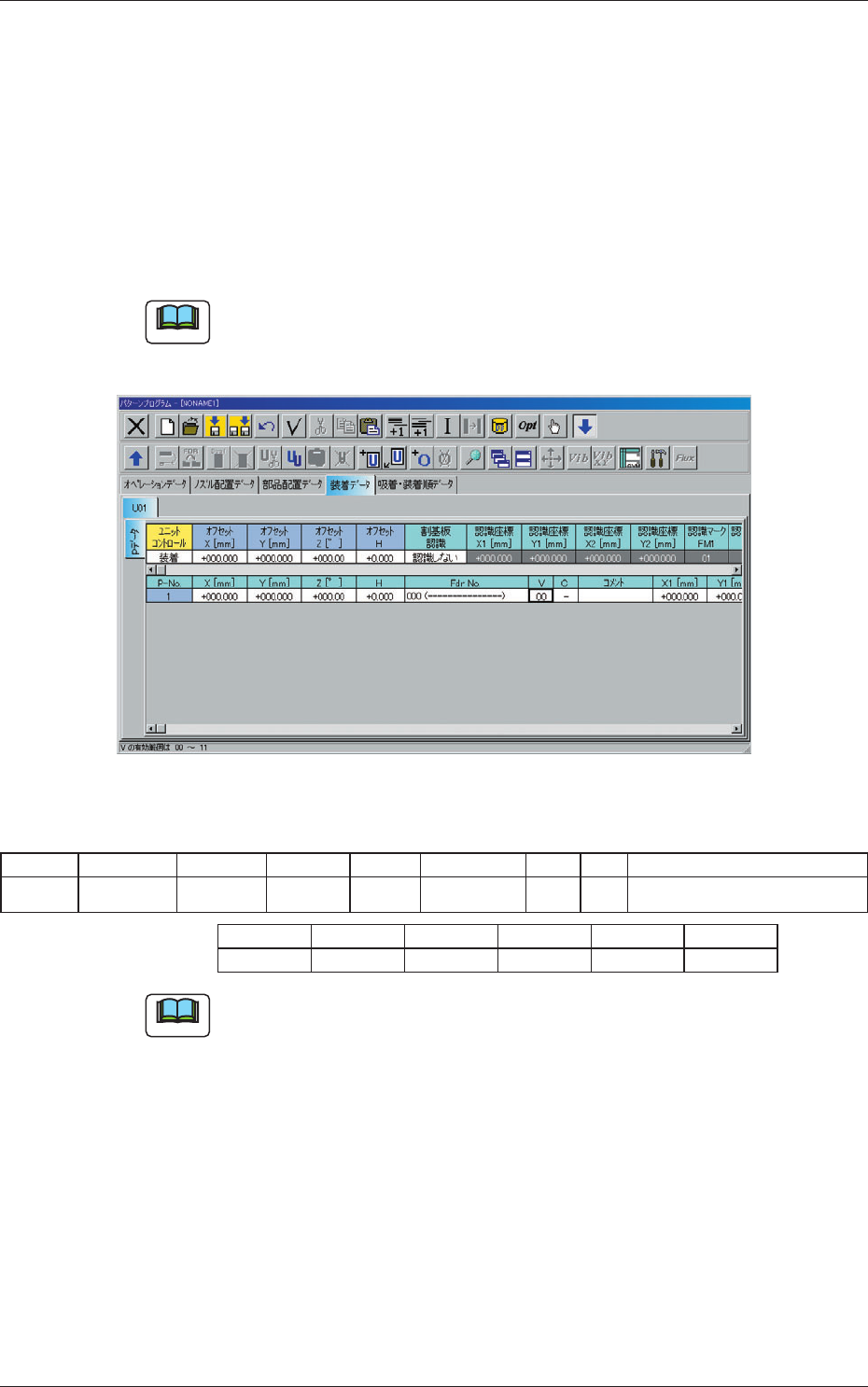
Fig.24 “装着データ”タブシート
Table 2
P-No X [mm] Y[mm] Z[
°
] H Fdr No. V C コメント
2 +020.000 +025.000 +045.00 +1.200 703(TOP) 11 - トップ部品装着
X1 [mm] Y1 [mm] X2 [mm] Y2 [mm] FM1 FM2
+000.000 +000.000 +000.000 +000.000 02 02
ノート
基板認識カメラのフォーカス範囲に制約があるため、V データが
“11”の場合で、H < -1.5 mm または + 1.5 mm < H の場合は異常
になります。
6.1 パターンプログラム