XP Type II 工程师培训手册 (2.0).pdf.pdf - 第85页
FK-9F98-34 XP T ype II Series T raining T ext for Service Engineers Edition 2.0 XP142E – Chapter 6 Proper Dat a Measurement s Page 26 of 30 6.22 Part s Reject Position 1. Select [Maintenance A] – [Jog] – [Fiducial Camera…
FK-9F98-34 XP Type II Series Training Text for Service Engineers
Edition 2.0 XP142E – Chapter 6 Proper Data Measurements Page 25 of 30
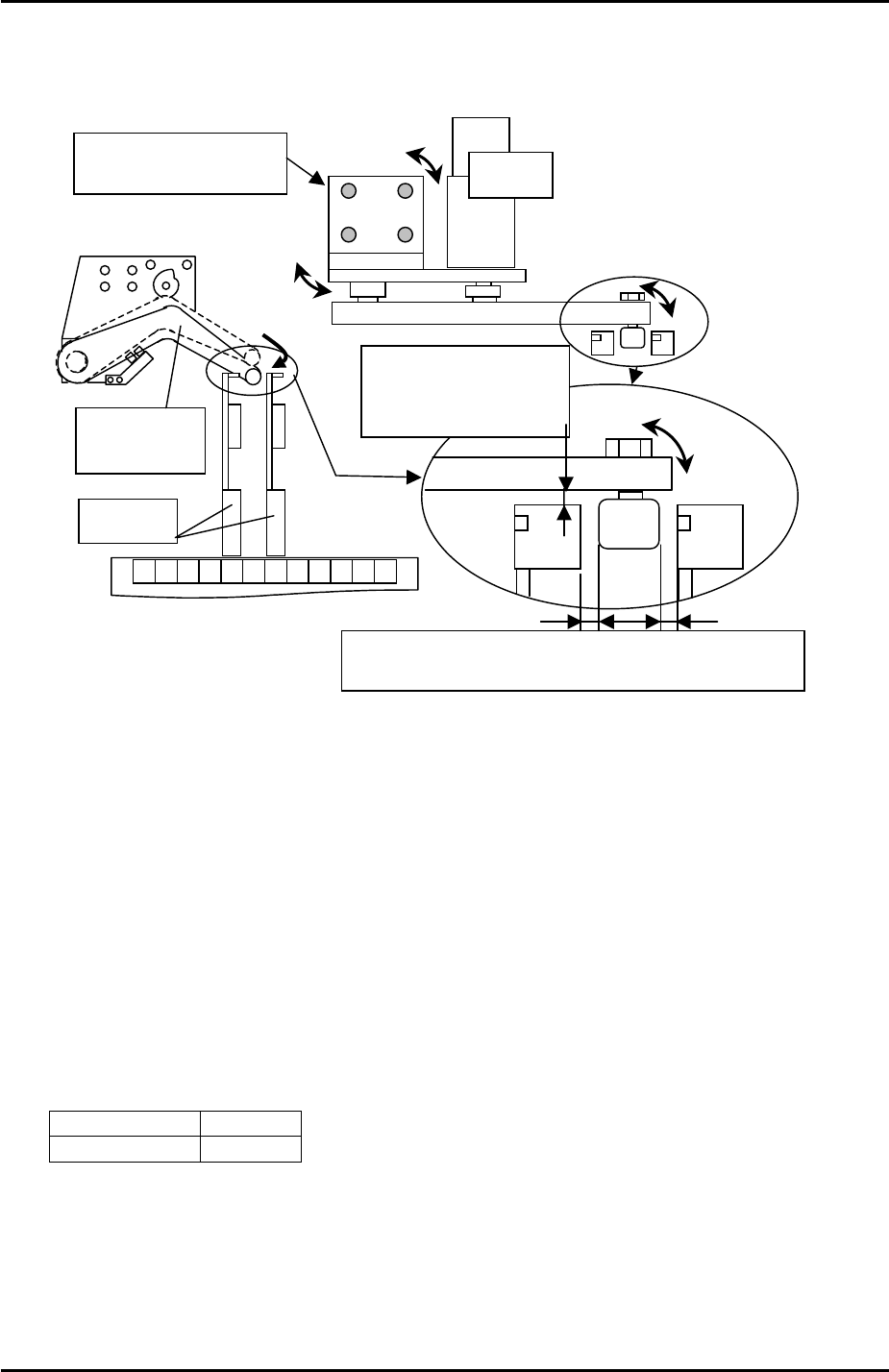
9. The position of the XP indexing lever in the X direction should be such that when the
indexing lever is pressed down it is in the center of the two feeders on either side. Refer
to the diagram below and adjust if necessary.
19 21 20 22 18
Feeder
Feeder
index lever
The clearance between
lever and feeder:
0.5mm~1.0mm
Motor
A
djust the motor BKT
for positioning
Adjust to have even clearance between the cam followe
r
and feeder when lowerin
g
the index lever.
10. After any adjustments confirm that the feeder indexing lever height is still 0.5mm (see the
first part of 6.17 “feeder indexing lever height”).
11. Finally select [Maintenance C] – [Proper Data Editor] – [Machine Origin] – and confirm
that the value entered for [F_DownPoint] and [G_DownPoint] is –8.5mm.
6.21 Retract Position
1. The retract position ensures the placing head is not in a position that would cause
interference when clamping or unclamping an MFU from the machine.
2. Select [Maintenance C] – [Proper Data Editor] – [Machine Origin] – and check that the
following proper data is input:
X_Table Org 5mm
Y_Table Org 400mm
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
6 – 25 CS Section
FK-9F98-34 XP Type II Series Training Text for Service Engineers
Edition 2.0 XP142E – Chapter 6 Proper Data Measurements Page 26 of 30
6.22 Parts Reject Position
1. Select [Maintenance A] – [Jog] – [Fiducial Camera] and display the cross hairs on the
screen.
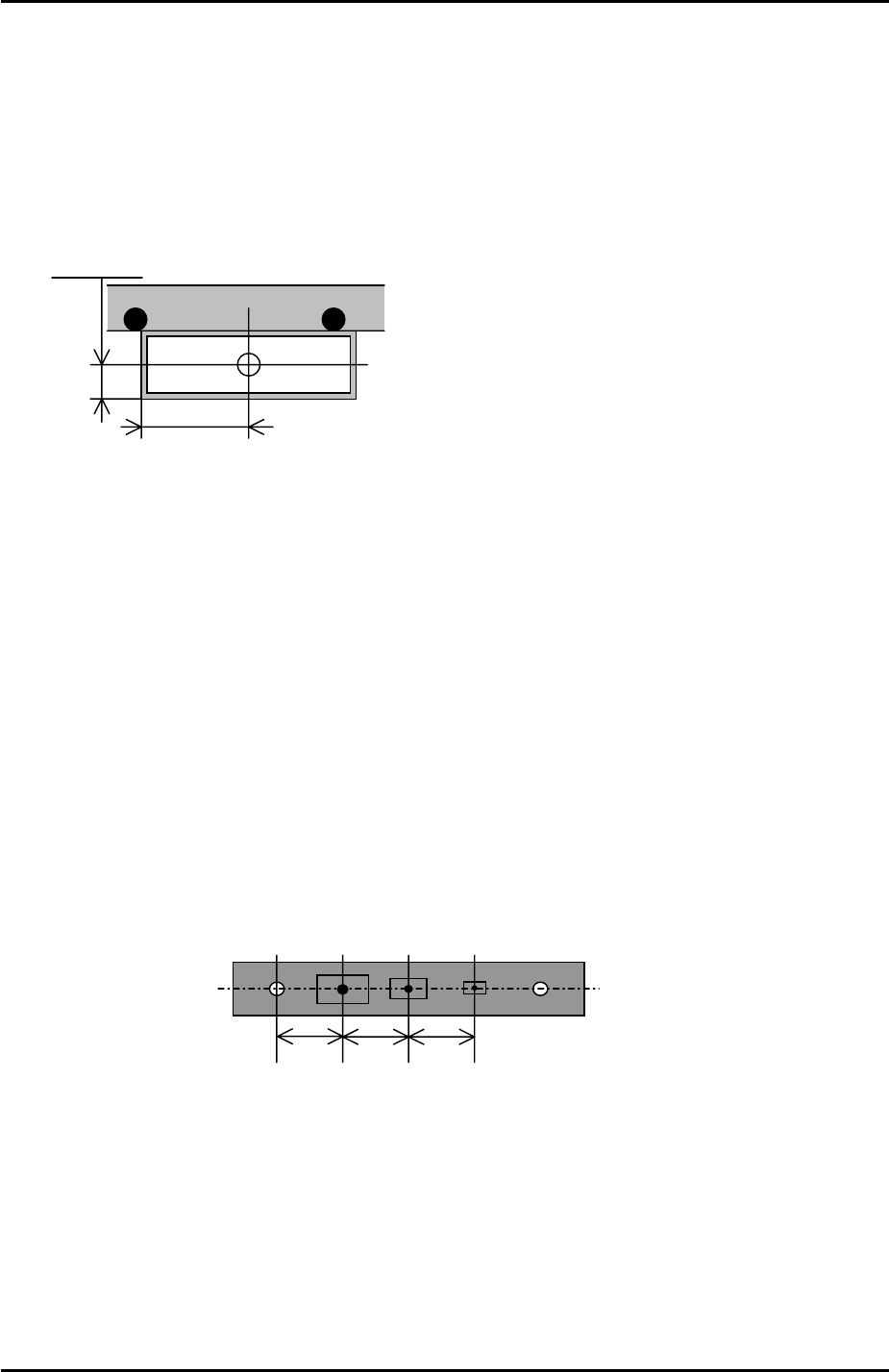
2. Jog the fiducial camera until it is in the center of the parts reject box. Refer to the
diagram below for the dimensions of the box:
12.5mm
35mm
3. Select [Maintenance C] – [Proper Data Editor] – [Dispose Position] –
[X_Disposal1/Y_Disposal1] – [Direct Servo Input] to save the current X-axis and Y-axis
positions in proper data.
6.23 Parts Gage Pickup Positions
1. Equipment: nozzle jig (A5706ASEAJ8100). Lever type dial gage (0.01mm).
2. Select [Maintenance A] – [Jog] – [Fiducial Camera] and display the cross hairs.
3. Carefully remove the three ceramic parts gages from the parts gage station so that the
parts gage indents and vacuum holes are visible.
4. Center the cross hairs on the parts gage 1 vacuum hole and select [Maintenance C] –
[Proper Data Editor] – [Jig Position] – [Y_JigPickPos] – [Direct Servo Input] and
[X_JigPickPos1] – [Direct Servo Input] to save the current X and Y axis counter values to
proper data.
2 3
A
1
10 10 10
5. Return to the jog screen and center the cross hairs on the parts gage 2 vacuum hole and
select [X_JigPickPos2] – [Direct Servo Input] to save the current X axis counter value to
proper data.
6. Return to the jog screen and center the cross hairs on the parts gage 3 vacuum hole and
select [X_JigPickPos3] – [Direct Servo Input] to save the current X-axis counter value to
proper data.
7. Insert the nozzle jig in nozzle piston no.1 and replace the no.1 parts gage in the parts
gage station.
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
6 – 26 CS Section
FK-9F98-34 XP Type II Series Training Text for Service Engineers
Edition 2.0 XP142E – Chapter 6 Proper Data Measurements Page 27 of 30
8. Bring the nozzle jig above the parts gage and descend the Z-axis until the nozzle jig
almost contacts the parts gage.
9. Place a dial gage on the nozzle jig and use this to determine the point where the nozzle
jig first contacts the parts gage.
10. Select [Z_JigPickPos] – [Direct Servo Input] to save the current Z-axis counter value to
proper data.
6.24 Matrix Data
1. Equipment: glass gage for matrix measurement (A5704DEAJ14013).
2. Note that the matrix data measurement should be carried out when the machine is cold,
otherwise the results will not be reliable. Fuji recommends that the machine is not used
for at least two hours prior to the measurement.
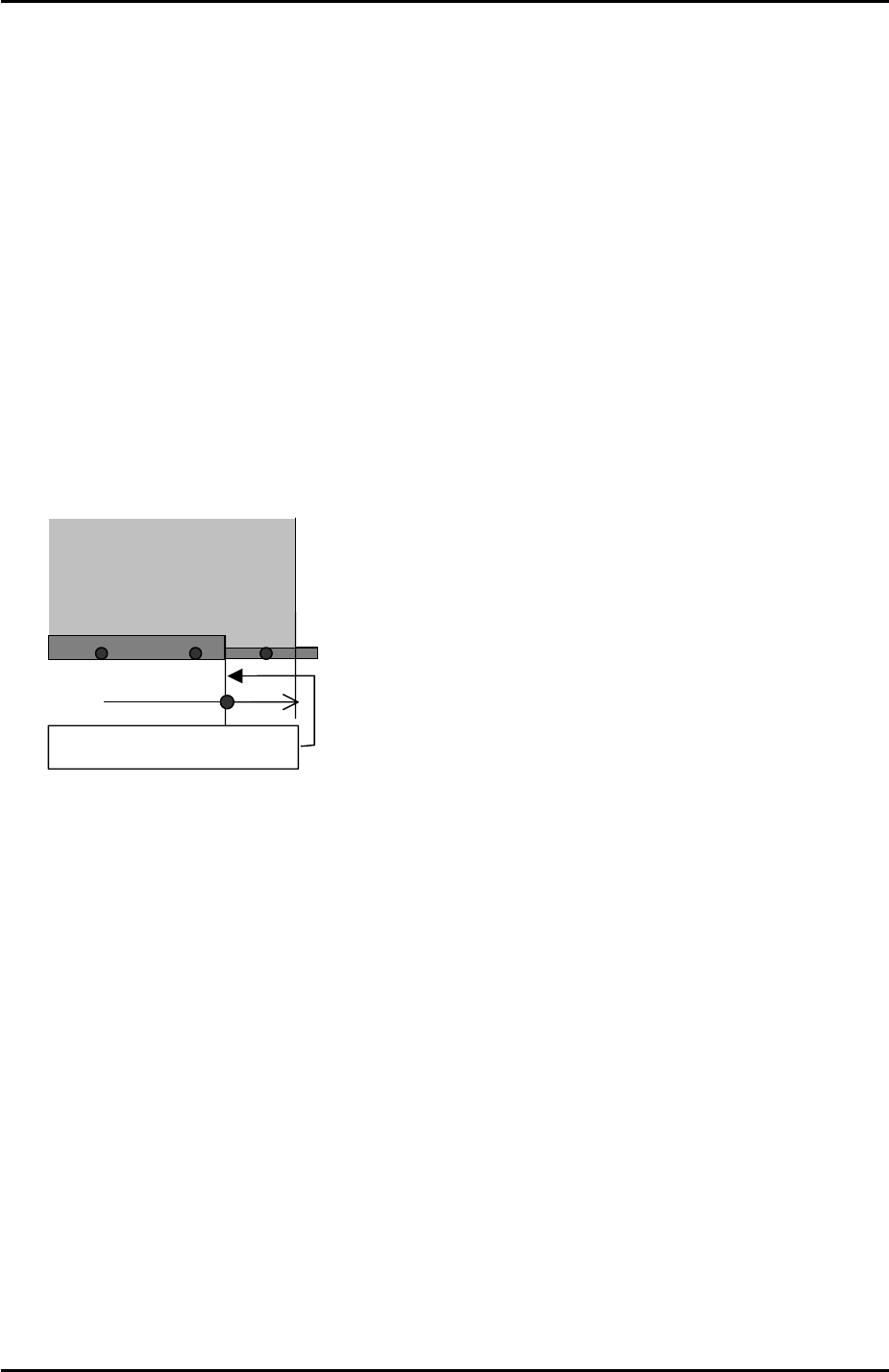
3. Clamp the matrix measurement glass gage approximately 110mm from the main
conveyor right end.
Approx. 110mm
Main conveyor right end
Glass gauge for matrix data
(A5704DEAJ1013)
4. Because the glass gage is 5mm thick the main lifter upper limit sensor will not come ON
when the gage is clamped. As a result it is necessary to interrupt the upper limit sensor
with a piece of paper tape.
5. Select [Maintenance A] – [Jog] – [Fiducial camera] – and display the cross hairs on the
screen.
6. Center the fiducial camera on the last dot in the bottom left hand corner of the glass gage
and record the Y-axis counter value.
7. Move the fiducial camera until it is centered on the last dot in the bottom right hand
corner of the glass gage. Compare the current Y-axis counter value with that recorded in
step 6. The difference in value should be within 0.5mm. This ensures that the X-axis and
the glass gage are parallel.
8. With the fiducial camera still centered on the last dot in the bottom right hand corner of
the glass gage select [Maintenance C] – [Matrix data measurement] – and set the
acceleration rate to 1.0 before selecting [Start].
9. The measurement will take approximately 1 hour to complete. Matrix data measurement
is designed to compensate for minute discrepancies in the straightness of the X and Y-
axis ball screws. The measurement is performed in the factory prior to machine shipment
and is not normally performed again.
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
6 – 27 CS Section