SER09989020_YV100II Service_J.pdf - 第56页
3- 35 SER09989020 調整 第 3 章 1 4 準備が完了したら、非常停止状態を解除します。 非常停止ボタンを回転解除し、Y P U の [READY] ボタンを押してください。 e 5 [ENTER] キーを押します。 吸装着レベルの測定が始まり、終了すると(約 8 ∼ 2 0 秒後)画面下部に結果 が表示されます。 6 操作ディスプレイの指示に従って終了します。 結果を残したい場合は [ENTER] キーを、結果を破棄…
3 -
34
SER09989020
調整
第
3
章
1
1.3.2 装着レベル
部品を実装するためノズルが下降して吸着圧を正圧に反転させると、負圧セン
サーの検出値が低下します。この検出値があらかじめ設定した装着レベルよりも
低下したとき、部品がノズルから離れて基板に実装されたと判断されます。
装着レベルは各ヘッドごとに、ノズルを密閉した状態の最高真空圧よりも少し低
いレベル(オフセット値)に設定します。下記の手順で設定してください。
1
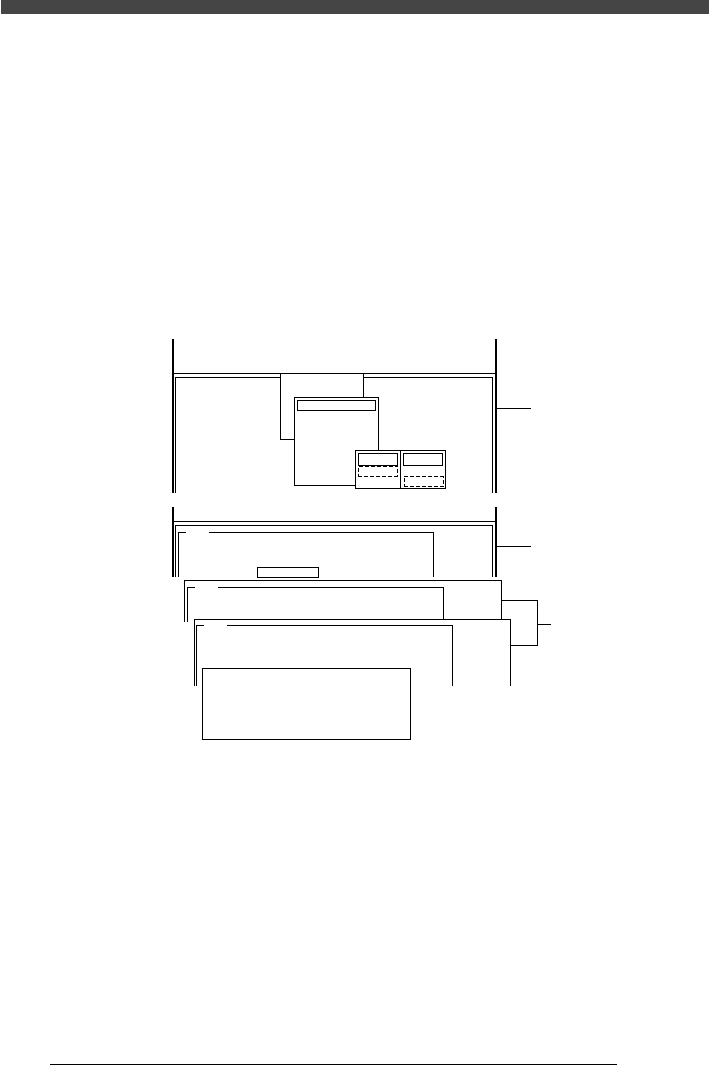
「装着レベル」コマンドを実行します。
1.「3/3/B1 調整項目選択」→「吸装着レベル」を選択実行します。
2.「全ヘッド」→「装着レベル」を選択します。
60943107-00
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 3/マシン調整
<コマンドリスト> B/ファイル操作
<<モード>> 3/マシン調整
A441
吸装着レベルのオフセット値を入力してください。
吸着レベルは各ヘッド解放状態の負圧レベルよりオフセット分高い値を
装着レベルは各ヘッド・・・
オフセット 5
A442
装着レベルの測定を行います。
装着レベルの測定は、指定されたノズルを使用するか、・・・
A444
<<<自動調整中!!>>>
吸装着レベルの測定中です。
測定は・・・
B1 調整項目選択
調整・検索対象
吸装着レベル
ヘッド指定
全ヘッド
ヘッド番号
対象指定
吸着レベル
装着レベル
LEVEL
下限値
設定値
結果
1
XX
XX
XX
XX
2
XX
XX
XX
XX
3
XX
XX
XX
XX
4
XX
XX
XX
XX
5
XX
XX
XX
XX
6
XX
XX
XX
XX
7
XX
XX
XX
XX
8
XX
XX
XX
XX
Step 1
Step 2
Step 3∼5
2
オフセット「5」を確認して、 [ENTER] キーを押します。
オフセットは、通常「5」を指定します。
3
非常停止ボタンを押してから、全ヘッドのノズル穴を
密閉します。
e
空気が抜けないように全ノズル穴を密閉してください。

3-
35
SER09989020
調整
第
3
章
1
4
準備が完了したら、非常停止状態を解除します。
非常停止ボタンを回転解除し、YPU の [READY] ボタンを押してください。
e
5
[ENTER] キーを押します。
吸装着レベルの測定が始まり、終了すると(約8 ∼ 20 秒後)画面下部に結果
が表示されます。
6
操作ディスプレイの指示に従って終了します。
結果を残したい場合は [ENTER] キーを、結果を破棄したい場合は、[ESC]
キーを押してください。
7
調整データを保存します。
「B2 調整後データ保存」または「B0 データ保存後終了」を選択実行してくだ
さい。(保存したくない場合は、「B3 調整前データ復活」または「B7 強制終
了」を選択実行してください。)
8
非常停止ボタンを押します。
e
安全を確認して、全ノズル穴を解放してください。
3 -
36
SER09989020
調整
第
3
章
1
1.4 R 軸絶対精度補正
部品搭載するときの各ヘッドのR 軸(ノズル回転軸)の角度補正です。
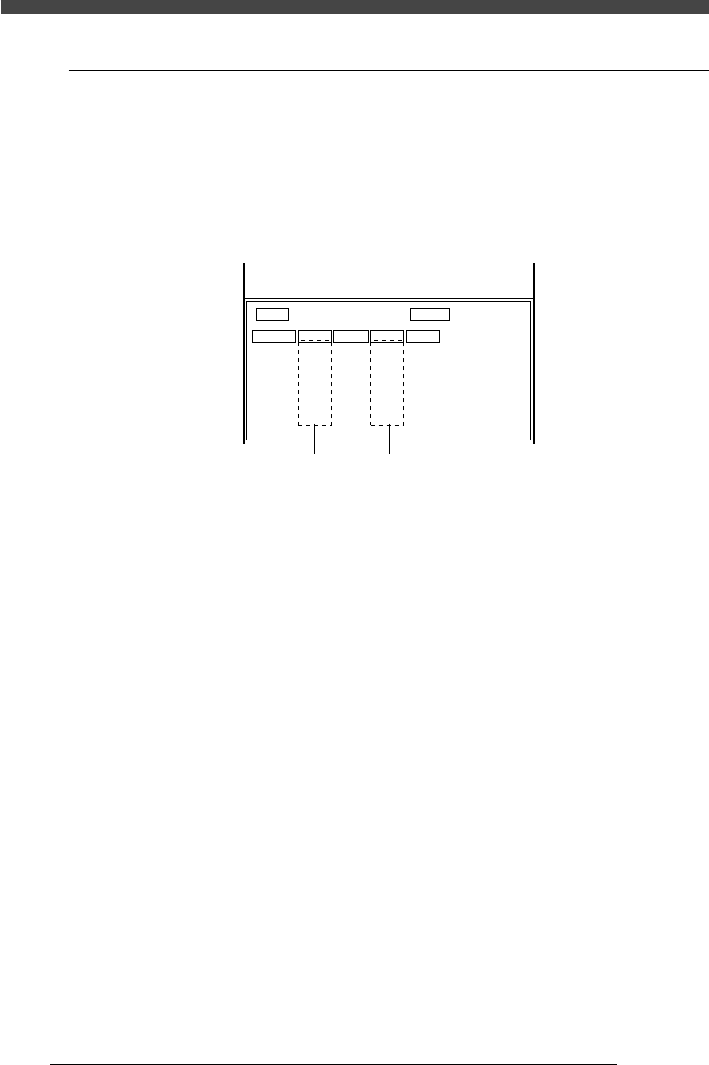
「3/2/マシンデータ編集」→「A1 編集切替」→「R 絶対精度補正」を選択実行
すると、下図のように設定値が表示されます。ここには、各ヘッドで0 度、180
度、90 度、-90 度搭載したときのR 軸の角度補正値が入力されています。
■ R軸絶対精度補正画面
60943108-00
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 2/マシンデータ編集
ヘッド 1
ヘッド 2
ヘッド 3
ヘッド 4
ヘッド 5
ヘッド 6
ヘッド 7
ヘッド 8
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0゜
ヘッド番号
編集中 編集対象
R絶対精度補正
0.07
0.00
0.00
0.00
0.00
0.00
0.00
0.00
180゜
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
90゜
-0.07
0.00
0.00
0.00
0.00
0.00
0.00
0.00
-90゜
シングル認識カメラマルチ認識カメラ
シングル認識カメラを装備している場合
搭載角度90 度を基準としているシングル認識カメラで部品を搭載したときに、
0 度、180 度および-90 度の搭載が多少オフセットしている場合があります。
このオフセットは、調整ユーティリティーを使ってQFP 部品をシングル認識カ
メラで認識させ、90 度の認識結果に対する各角度の認識結果の差を求めること
により補正できます。(基準となる90 度のパラメーターには常に0.00が入りま
す。)
マルチ認識カメラのみの場合
搭載角度0 度を基準としているマルチ認識カメラで部品を搭載したときに90
度、180 度および-90 度の搭載が多少オフセットしている場合があります。こ
のオフセットは、調整ユーティリティーを使ってSOP 部品をマルチ認識カメラ
で認識させ、0 度の認識結果に対する各角度の認識結果の差を求めることにより
補正できます。(基準となる0 度のパラメーターには常に0.00 が入ります。)