TK26522.晹昳棊壓僠僃僢僋婡擻.pdf - 第4页
ヤ マ ハ 発 動 機 株 式 会 社 I M 事 業 部 マ ウ ン タ ー 技 術 部 ソ フ ト 開 発 グ ル ー プ MDOC-SOFT50395 2. 2.1 「部品吸着後のカメラ認識後」~「搭載直前まで」の間、常時負圧レベルを監視することで部品 落下チェックを行います。吸着後の負圧レベルのピーク値を記憶し、ピーク値から一定値( ※ )を 下回った場合に部品落下と判定します。 (※) マシン設定にて、ノズルタ…
ヤマハ発動機株式会社IM事業部
マウンター技術部ソフト開発グループ
MDOC-SOFT50395
1.
1.1
0603等の極小部品では、ノズル開放レベルとノズル密閉レベルの差が小さい為、一定の負圧
レベルを閾値とする判定ロジックでは部品有無が正確に判定できず、極小部品有無の判定は
カメラ認識に依存していました。カメラ認識による手法では常時監視しているわけではなく、認
識後の部品落下は判定できません。
1.2
負圧レベルによる部品落下チェックを可能にします。カメラ認識後から搭載直前までの間、部品
落下のチェックを行い、部品の未実装および誤実装を防止します。
ヤマハ発動機株式会社IM事業部
マウンター技術部ソフト開発グループ
MDOC-SOFT50395
2.
2.1
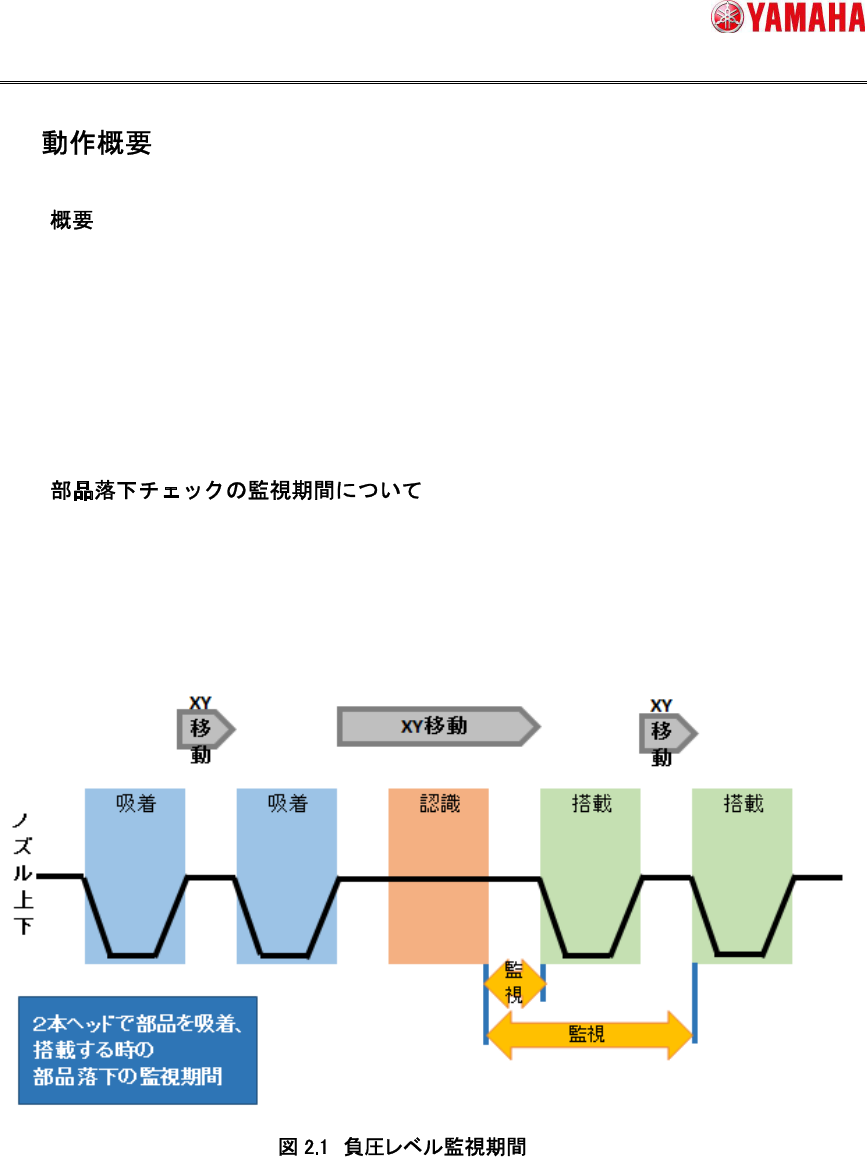
「部品吸着後のカメラ認識後」~「搭載直前まで」の間、常時負圧レベルを監視することで部品
落下チェックを行います。吸着後の負圧レベルのピーク値を記憶し、ピーク値から一定値(
※
)を
下回った場合に部品落下と判定します。
(※) マシン設定にて、ノズルタイプ毎に数値を指定します。
2.2
「部品吸着後のカメラ認識後」~「搭載直前まで」の間、「部品落下チェック機能」 が有効なヘッド
(ノズルタイプ)且つ、部品吸着中の全ヘッドの負圧レベルを監視します。
ヤマハ発動機株式会社IM事業部
マウンター技術部ソフト開発グループ
MDOC-SOFT50395
2.3
「部品吸着後のカメラ認識後」~「搭載直前まで」の間、常時負圧レベルを監視することで部品
落下チェックを行います。部品落下を検知しても即時エラー出力はしません。
エラーの出力タイミングは以下のとおりです。
XY 軸が搭載位置まで移動した後にエラー出力します。このとき、全ヘッドの部品落下状態
を見て、エラー対象のヘッドは全てエラー出力します。
搭載ヘッドの搭載が完了した後にエラー出力します。このとき、全ヘッドの部品落下状態を
見て、エラー対象のヘッドは全てエラー出力します。