TK26522.晹昳棊壓僠僃僢僋婡擻.pdf - 第5页
ヤ マ ハ 発 動 機 株 式 会 社 I M 事 業 部 マ ウ ン タ ー 技 術 部 ソ フ ト 開 発 グ ル ー プ MDOC-SOFT50395 2.3 「部 品吸 着 後の カメ ラ 認 識後 」 ~「 搭 載 直前 まで 」の 間 、常 時負 圧 レ ベル を監 視 す る ことで 部品 落下チェックを行います。部品落下を検知しても即時エラー出力はしません。 エラーの出力タイミングは以下のとおりです。 …
ヤマハ発動機株式会社IM事業部
マウンター技術部ソフト開発グループ
MDOC-SOFT50395
2.
2.1
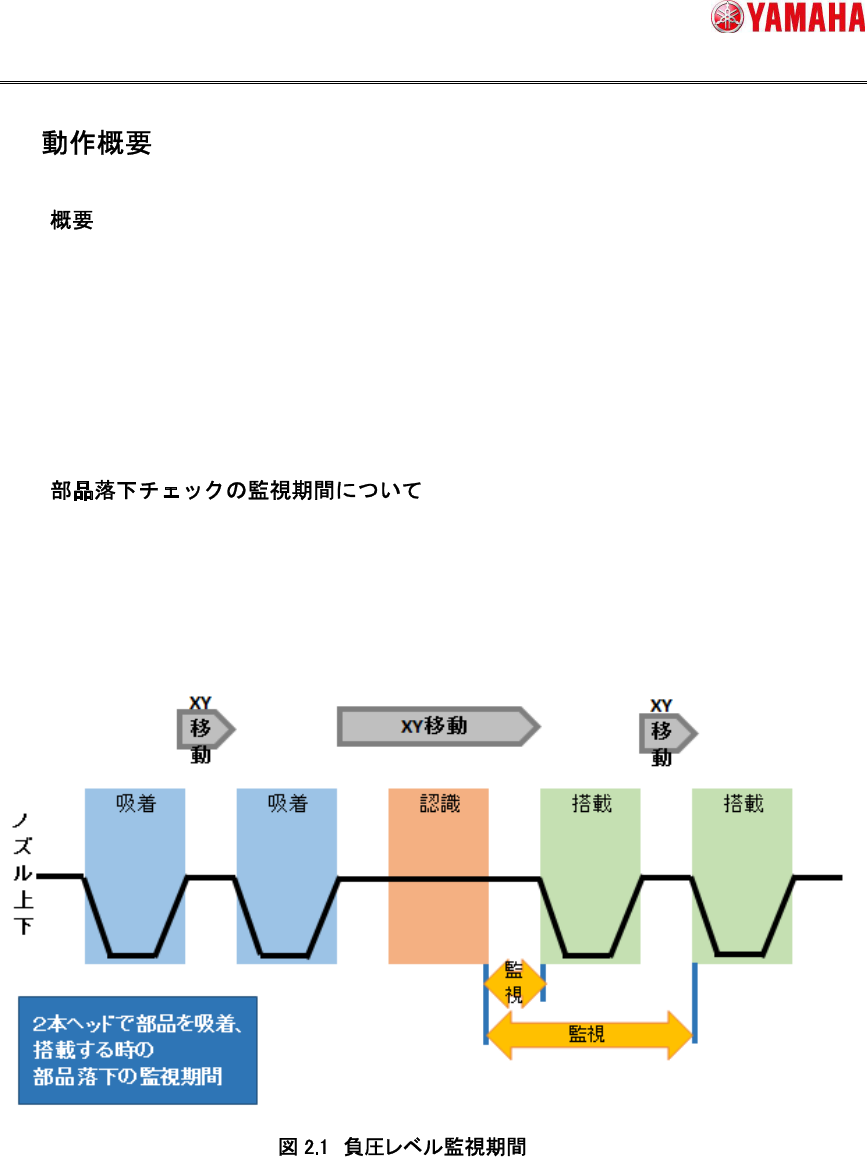
「部品吸着後のカメラ認識後」~「搭載直前まで」の間、常時負圧レベルを監視することで部品
落下チェックを行います。吸着後の負圧レベルのピーク値を記憶し、ピーク値から一定値(
※
)を
下回った場合に部品落下と判定します。
(※) マシン設定にて、ノズルタイプ毎に数値を指定します。
2.2
「部品吸着後のカメラ認識後」~「搭載直前まで」の間、「部品落下チェック機能」 が有効なヘッド
(ノズルタイプ)且つ、部品吸着中の全ヘッドの負圧レベルを監視します。
ヤマハ発動機株式会社IM事業部
マウンター技術部ソフト開発グループ
MDOC-SOFT50395
2.3
「部品吸着後のカメラ認識後」~「搭載直前まで」の間、常時負圧レベルを監視することで部品
落下チェックを行います。部品落下を検知しても即時エラー出力はしません。
エラーの出力タイミングは以下のとおりです。
XY 軸が搭載位置まで移動した後にエラー出力します。このとき、全ヘッドの部品落下状態
を見て、エラー対象のヘッドは全てエラー出力します。
搭載ヘッドの搭載が完了した後にエラー出力します。このとき、全ヘッドの部品落下状態を
見て、エラー対象のヘッドは全てエラー出力します。
ヤマハ発動機株式会社IM事業部
マウンター技術部ソフト開発グループ
MDOC-SOFT50395
3.
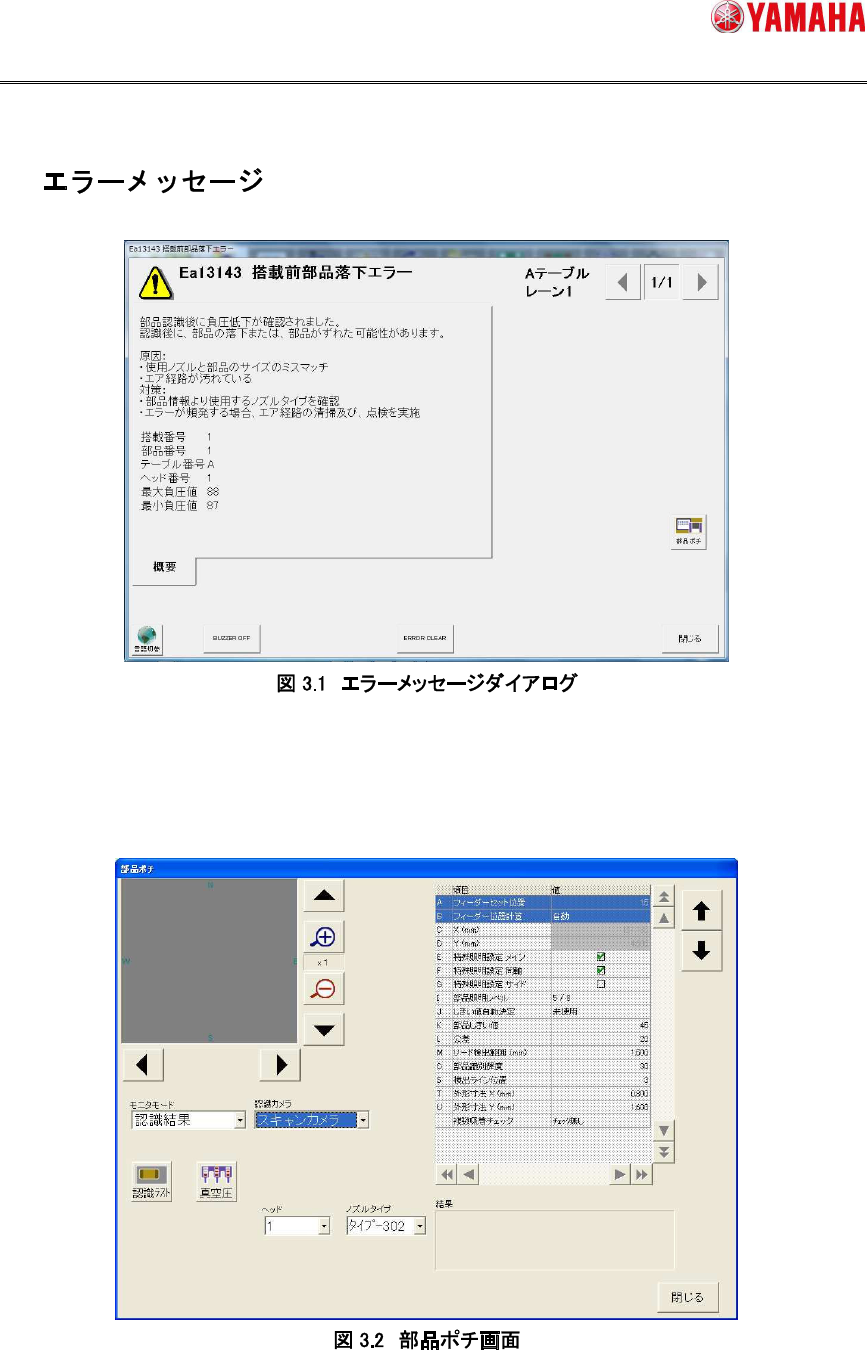
部品落下を検知した場合、以下のエラーを出力します。
部品落下を検出した場合、ヘッド毎にエラーメッセージを表示します。エラーメッセージ画面上の
[部品ポチ] ボタンから、エラーヘッドの部品吸着状態および負圧レベルが確認できます。