Program.x200.pdf - 第104页
᳞Ͽৄ䗞ᭅᯋͼ䗞乎ᷤ䞡ӯᰓ⼏ߏ⒯ࡽᴶͼࡽ⒯ࡽᴶ 䗞ᅯᭅȢ Fig.3B 45 Fig.3B 45 Fig.3B 45 Fig.3B 45 Fig.3B 45 0107-001 2 - 86 4.2 4.2 4.2 4.2 4.2 ᭜ᴁḛⱙාᴁ᪢Ա ᭜ᴁḛⱙාᴁ᪢Ա ᭜ᴁḛⱙාᴁ᪢Ա ᭜ᴁḛⱙාᴁ᪢Ա ᭜ᴁḛⱙාᴁ᪢Ա ⒯ࡽᴶ ⒯ࡽᴶ ⒯ࡽᴶ ⒯ࡽᴶ ⒯ࡽᴶ
4.2.34.2.3
4.2.34.2.3
4.2.3
Pointing DevicePointing Device
Pointing DevicePointing Device
Pointing Device
Ք⫽ Pointing DeviceͼңϠᢞ߬㸽Ђ䗞ᢾᭅȢ
᳞݈ᭅؑ・ৌⱙ䕨ܺͼ䇌গ✼ “4.2.2 䬃ⲭ ”Ȣ
(a) ḎՔ⫽ “Tenkey(ᭅᄬ䬃)” ⬡䴷ͼ㛒ң㾻ᩍሤ䕨ܺᭅ
ؑȢ
(b) ң䬃ⲭৄҺ䕨ܺܽ䚽᭜ᄬȢ
•
᪢Ա乏ᑤ᪢Ա乏ᑤ
᪢Ա乏ᑤ᪢Ա乏ᑤ
᪢Ա乏ᑤ
() ᗀᣞϹ䕨ܺᭅⱙ᭜ᴁḛȢ
(2) पߐ০Ϡㆂ༉ͼᰓ⼏ৄҺ䗞ᢾⱙϠᢞ߬㸽Ȣ
(3) पߐ䗞乎䞡䆓ᅯᭅͼℹᭅᇛ䕨ܺࠅ᭜ᴁḛ䞡Ȣ
Fig.3B 43Fig.3B 43
Fig.3B 43Fig.3B 43
Fig.3B 43
Fig.3B 42Fig.3B 42
Fig.3B 42Fig.3B 42
Fig.3B 42
Fig.3B 44Fig.3B 44
Fig.3B 44Fig.3B 44
Fig.3B 44
0107-001 2-85
4.24.2
4.24.2
4.2
᭜ᴁḛⱙාᴁ᪢Ա᭜ᴁḛⱙාᴁ᪢Ա
᭜ᴁḛⱙාᴁ᪢Ա᭜ᴁḛⱙාᴁ᪢Ա
᭜ᴁḛⱙාᴁ᪢Ա
Note
᳞Ͽৄ䗞ᭅᯋͼ䗞乎ᷤ䞡ӯᰓ⼏ߏ⒯ࡽᴶͼࡽ⒯ࡽᴶ
䗞ᅯᭅȢ
Fig.3B 45Fig.3B 45
Fig.3B 45Fig.3B 45
Fig.3B 45
0107-001 2-86
4.24.2
4.24.2
4.2
᭜ᴁḛⱙාᴁ᪢Ա᭜ᴁḛⱙාᴁ᪢Ա
᭜ᴁḛⱙාᴁ᪢Ա᭜ᴁḛⱙාᴁ᪢Ա
᭜ᴁḛⱙාᴁ᪢Ա
⒯ࡽᴶ⒯ࡽᴶ
⒯ࡽᴶ⒯ࡽᴶ
⒯ࡽᴶ
4.34.3
4.34.3
4.3 “
Operation Data(Operation Data(
Operation Data(Operation Data(
Operation Data(
᪢Աᭅ᪢Աᭅ
᪢Աᭅ᪢Աᭅ
᪢Աᭅ
))
))
)”
TabTab
TabTab
Tab
4.3.4.3.
4.3.4.3.
4.3. “
P.C.B.Data(P.C.B.Data(
P.C.B.Data(P.C.B.Data(
P.C.B.Data(
ාᵔᭅාᵔᭅ
ාᵔᭅාᵔᭅ
ාᵔᭅ
))
))
)”
TabTab
TabTab
Tab
••
••
•
乊䴷ᰓ⼏乊䴷ᰓ⼏
乊䴷ᰓ⼏乊䴷ᰓ⼏
乊䴷ᰓ⼏
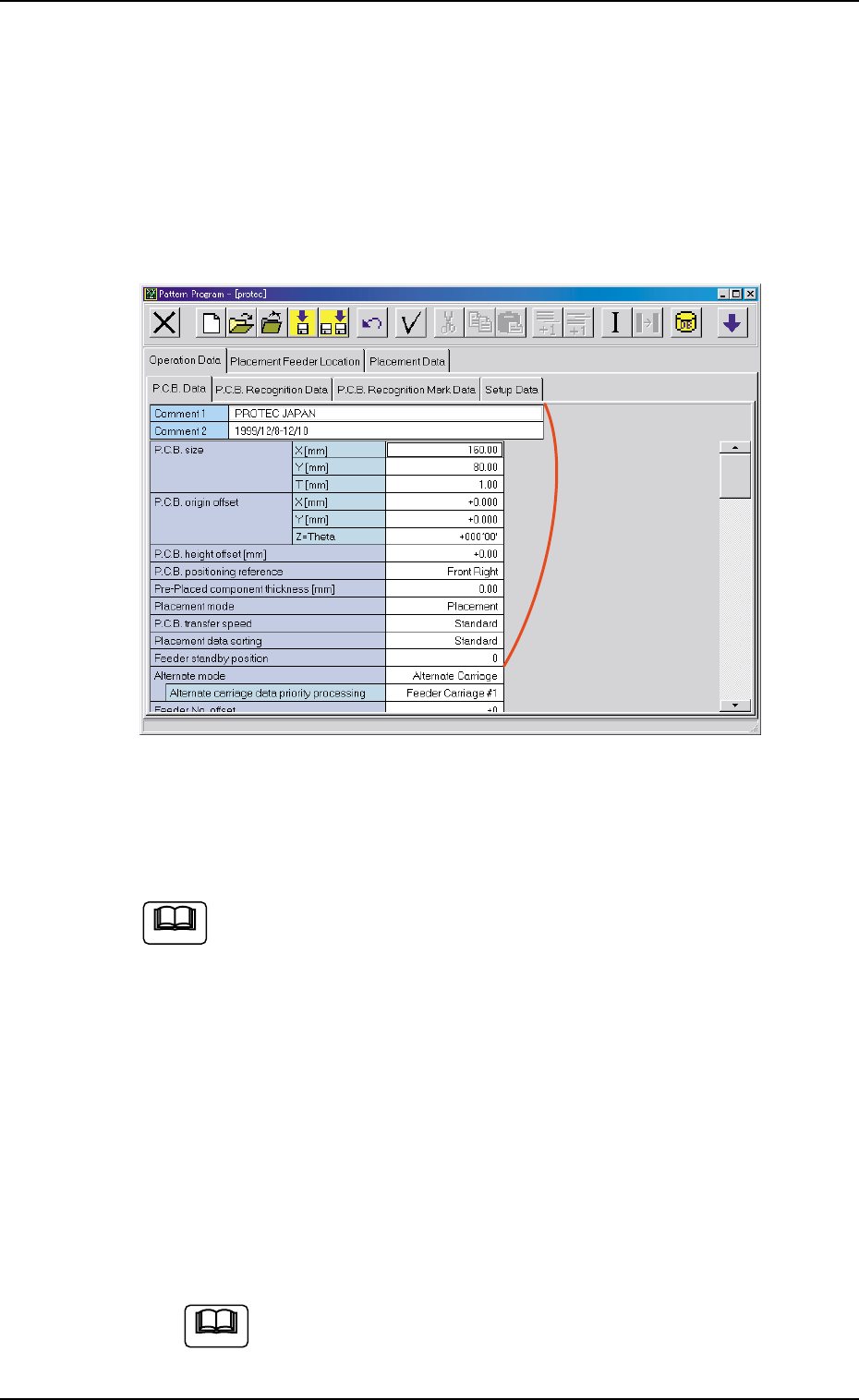
पߐ[Operation Data(᪢Աᭅ)]Tab 乊䴷Ђⱙ[P.C.B.Data(ා
ᵔᭅ)]Tabͼᰓ⼏བྷϠ Tab 乊䴷Ȣ
••
••
•
乊䴷ᵙ៥乊䴷ᵙ៥
乊䴷ᵙ៥乊䴷ᵙ៥
乊䴷ᵙ៥
᳞݈ᭅⱙ䕨ܺᮎ⊪ͼ䇌গ✼ “4.2 ᭜ᴁḛⱙාᴁ᪢Ա ”Ȣ
* *
* *
*
Comment , Comment 2, P.C.B. size(Comment , Comment 2, P.C.B. size(
Comment , Comment 2, P.C.B. size(Comment , Comment 2, P.C.B. size(
Comment , Comment 2, P.C.B. size(
ාᵔሏᇍාᵔሏᇍ
ාᵔሏᇍාᵔሏᇍ
ාᵔሏᇍ
), P.C.B.), P.C.B.
), P.C.B.), P.C.B.
), P.C.B.
origin offset(origin offset(
origin offset(origin offset(
origin offset(
ාᵔॴ⚎ාᵔॴ⚎
ාᵔॴ⚎ාᵔॴ⚎
ාᵔॴ⚎
offsetoffset
offsetoffset
offset
))
))
)
, P.C.B.height offset, P.C.B.height offset
, P.C.B.height offset, P.C.B.height offset
, P.C.B.height offset
((
((
(
ාᵔ傭ᑻාᵔ傭ᑻ
ාᵔ傭ᑻාᵔ傭ᑻ
ාᵔ傭ᑻ
OffsetOffset
OffsetOffset
Offset
))
))
)
[mm], P.C.B. positioning reference[mm], P.C.B. positioning reference
[mm], P.C.B. positioning reference[mm], P.C.B. positioning reference
[mm], P.C.B. positioning reference
((
((
(
ාᵔᅯාᵔᅯ
ාᵔᅯාᵔᅯ
ාᵔᅯ
ԢාޛԢාޛ
ԢාޛԢාޛ
Ԣාޛ
), Pre-Placed component thickness(), Pre-Placed component thickness(
), Pre-Placed component thickness(), Pre-Placed component thickness(
), Pre-Placed component thickness(
ܝ㺚ܝ㺚
ܝ㺚ܝ㺚
ܝ㺚
ܘӋ९ᑻܘӋ९ᑻ
ܘӋ९ᑻܘӋ९ᑻ
ܘӋ९ᑻ
))
))
)
[mm],[mm],
[mm],[mm],
[mm],
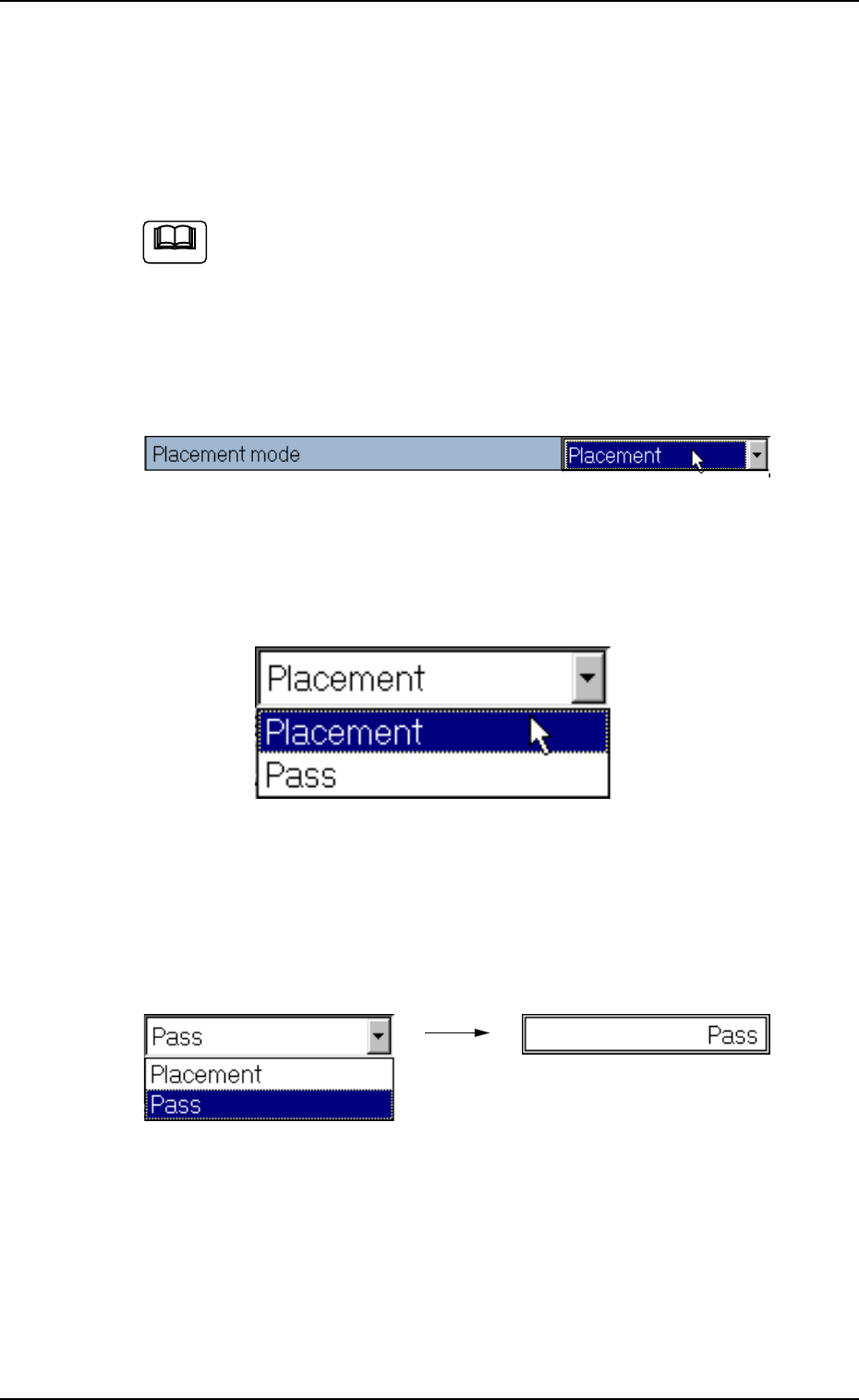
Placement mode(Placement mode(
Placement mode(Placement mode(
Placement mode(
䖥Ա⢋ᗖ䖥Ա⢋ᗖ
䖥Ա⢋ᗖ䖥Ա⢋ᗖ
䖥Ա⢋ᗖ
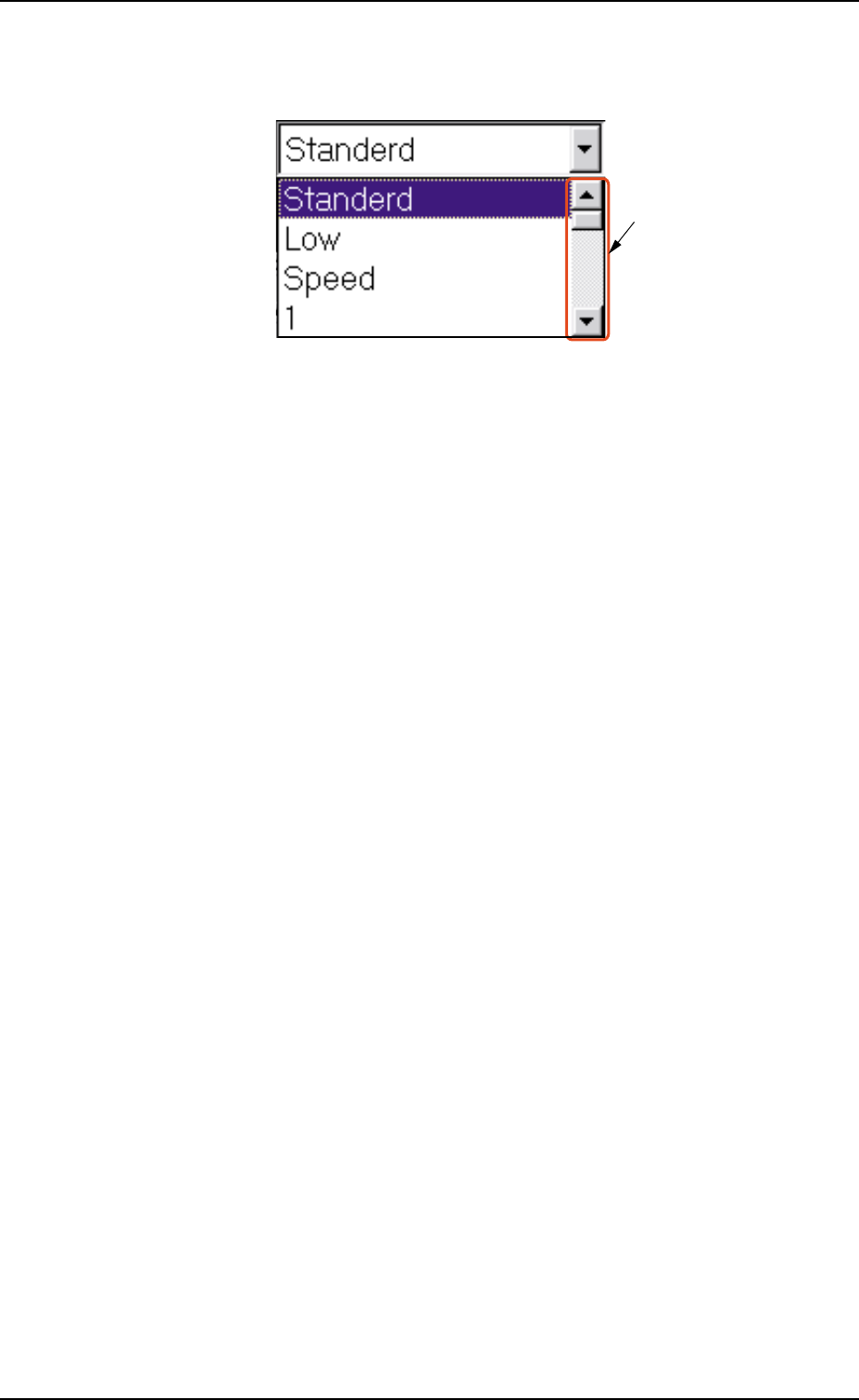
), P.C.B.transfer ), P.C.B.transfer
), P.C.B.transfer ), P.C.B.transfer
), P.C.B.transfer
speed(speed(
speed(speed(
speed(
ාᵔාᵔ
ාᵔාᵔ
ාᵔ
⿐䕒䗴⿐䕒䗴
⿐䕒䗴⿐䕒䗴
⿐䕒䗴
ᑻᑻ
ᑻᑻ
ᑻ
), Placement data sorting(), Placement data sorting(
), Placement data sorting(), Placement data sorting(
), Placement data sorting(
ᅞ㺚ᭅ㸽ᅞ㺚ᭅ㸽
ᅞ㺚ᭅ㸽ᅞ㺚ᭅ㸽
ᅞ㺚ᭅ㸽
), Feeder), Feeder
), Feeder), Feeder
), Feeder
standbystandby
standbystandby
standby
position( position(
position( position(
position(
䗖᭮ఽᕚᴏԢ㕃䗖᭮ఽᕚᴏԢ㕃
䗖᭮ఽᕚᴏԢ㕃䗖᭮ఽᕚᴏԢ㕃
䗖᭮ఽᕚᴏԢ㕃
))
))
)
ᕕ᭜ᴁḛ䞡䕨ܺᭅȢ
CommentȡComment2 ৄҺՔ⫽ܽ䚽᭜ᄬȢ
Fig.3B 46Fig.3B 46
Fig.3B 46Fig.3B 46
Fig.3B 46 “
P.C.B.DataP.C.B.Data
P.C.B.DataP.C.B.Data
P.C.B.Data”
TabTab
TabTab
Tab
乊䴷乊䴷
乊䴷乊䴷
乊䴷
4.34.3
4.34.3
4.3“
Operation Data(Operation Data(
Operation Data(Operation Data(
Operation Data(
᪢Աᭅ᪢Աᭅ
᪢Աᭅ᪢Աᭅ
᪢Աᭅ
))
))
) ”
TabTab
TabTab
Tab
0107-001 2-87
Note
Note
**
**
*